
VEX 대회에서의 프로젝트 계획

자율적인 일상을 위한 행동 구축
VEX 로봇 경연대회에서는 로봇 기술 챌린지의 60초 프로그래밍 기술 매치와의 게임의 15초 자율 기간을 위한 자율 루틴을 계획해야 합니다. 로봇이 자율적으로 작동하도록 프로그래밍하려면 로봇이 해야 할 일을 분해하여 프로그래밍 가능한 행동 기반 코드로 만들어야 합니다.
VEX 경쟁 로봇의 일반적인 행동은 다음과 같습니다.
- 전진 및 후진 운전
- 오른쪽과 왼쪽으로 돌다
- 게임 객체 잡기
- 게임 객체를 정확하게 배치하기
- 다양한 게임 객체 간 정렬
이러한 유형의 행동에 대한 기본 지침을 작성한 후, 성공적인 자율 루틴을 실행하려면 이러한 행동의 순서를 계획하기만 하면 됩니다!
![]() 동기 부여 토론
-
자동화된 동작
동기 부여 토론
-
자동화된 동작
VEX 로봇 경연 대회 필드 이미지를 표시하려면 현재 연도의 게임하거나 2019-2020 VEX 로봇 경연 대회 타워 점령에서 가져온 이미지를 사용할 수 있습니다.
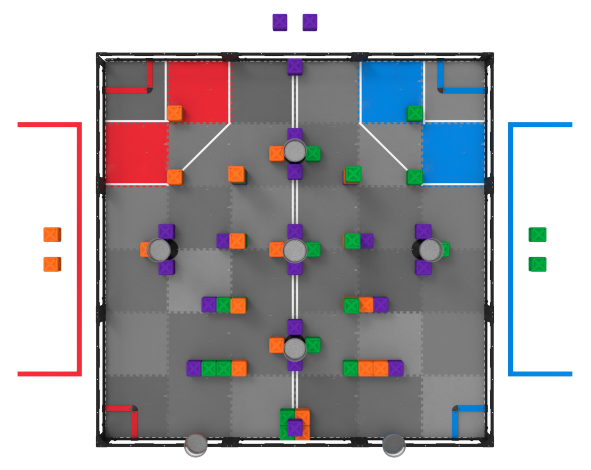
학생들에게 계획을 세울 수 있는 목표를 제공하는 것부터 시작하지만, 그 목표는 학생들의 경험 수준에 적합한지 확인하세요. 로봇의 조작기와 센서는 아직 논의되지 않았을 수 있으므로, 기본적인 동작만으로도 목표를 달성할 수 있도록 합니다. 예를 들어, 필드 위의 다른 어떤 것에도 닿지 않고 위쪽 필드의 빨간색 상단 모서리에서 오른쪽 하단 보라색 큐브로 이동하는 방법을 계획하도록 요청합니다.0
질문:왼쪽 상단 모서리에서 오른쪽 하단 모서리로 이동해야 하는 경우, 계획을 세우는 데 가장 먼저 해야 할 일은 무엇입니까?
답변:답변다를 수 있지만 작업을 더 작은 프로그래밍 가능한 동작이나 VEXcode V5 명령에 해당하는 동작으로 분해하는 것과 관련이 있어야 합니다.7
:로봇의 첫 번째 동작은 무엇입니까?
답변:답변은 방향을 바꾸거나 앞으로 주행하는 것일 수 있습니다. 허용되는 답변은 모두 단일 지침에 해당해야 합니다.
질문:회전이나 주행을 프로그래밍하려면 어떻게 해야 합니까? 어떤 측정이 필요할까요?
A:센서가 없는 자율 주행 프로그램의 경우 정확한 회전 및 주행 거리가 필요합니다.
![]() 학습 확장
-
스케치 및 의사 코드
학습 확장
-
스케치 및 의사 코드