
Projectplanning in VEX-wedstrijden

Gedragingen ontwikkelen voor een autonome routine
Voor VEX Robotics Competitions is het nodig om een autonome routine te plannen voor de 60 seconden durende programmeervaardigheidswedstrijd van de Robot Skills Challenge en voor de 15 seconden durende autonome periode van devan het huidige jaar. Om de robot zo te programmeren dat hij autonoom kan werken, moet je de taken van de robot opsplitsen in programmeerbare, op gedrag gebaseerde code.
Hier zijn enkele typische gedragingen van een VEX-competitierobot:
- Vooruit en achteruit rijden
- Naar rechts en links draaien
- Een spelobject pakken
- Een spelobject precies plaatsen
- Sorteren tussen verschillende spelobjecten
Zodra je de basisinstructies voor dit soort gedrag hebt opgesteld, hoef je voor het succesvol uitvoeren van een autonome routine alleen nog maar de volgorde van deze acties te plannen!
![]() Motiveer Discussie
-
Geautomatiseerd Gedrag
Motiveer Discussie
-
Geautomatiseerd Gedrag
Toon een afbeelding van het VEX Robotics Competition-veld, ofwel voor de wedstrijd van dit jaar (of gebruik deze van de VEX Robotics Competition Tower Takeover van 2019-2020.
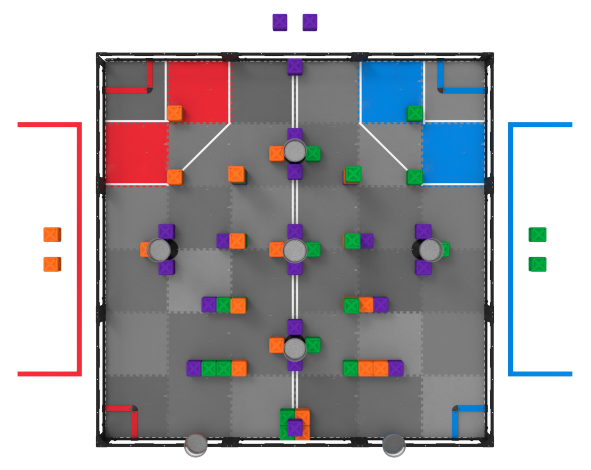
Geef leerlingen allereerst een doel waar ze naar kunnen streven, maar zorg ervoor dat dit doel past bij hun ervaringsniveau. De manipulator en sensoren van de robot zijn mogelijk nog niet besproken. Zorg er daarom voor dat het doel alleen met basisbewegingen haalbaar is. Vraag ze bijvoorbeeld om te plannen hoe ze van de rode bovenhoek in het veld hierboven naar de paarse kubus rechtsonder moeten bewegen zonder iets anders op het veld aan te raken.
V:Als je van de linkerbovenhoek naar de rechteronderhoek moet bewegen, wat is dan je eerste stap in de planning daarvan?
A:De antwoorden kunnen variëren, maar moeten betrekking hebben op het opsplitsen van de taak in kleinere programmeerbare gedragingen of gedragingen die overeenkomen met de instructies van VEXcode V5.
V:Wat is het eerste gedrag van de robot?
A:Het antwoord kan zijn: draaien in een bepaalde richting of vooruit rijden. Alle acceptabele antwoorden moeten overeenkomen met enkele instructies.
Vraag:Wat zou je moeten doen om bochten of rijden te programmeren? Welke metingen heb je nodig?
A:Voor een autonoom programma zonder sensoren zijn nauwkeurige draai- en rij-afstanden nodig.
![]() Breid je leerproces uit
-
Schets en pseudocode
Breid je leerproces uit
-
Schets en pseudocode
Om deze activiteit uit te breiden, kunt u uw leerlingen vragen om een uitdagingsveld (echt of gecreëerd) op schaal te schetsen en vervolgens pseudocode (Google / .docx / .pdf ) te schrijven voor een autonoom programma van 15 seconden. Pseudocode is in dit practicum niet geïntroduceerd, maar door te plannen met eenvoudige gedragingen zijn de studenten al begonnen met het oefenen van het schrijven van pseudocode. De praktijk van het schrijven van pseudocode, zoals beschreven in de link, hoeft niet te worden geïntroduceerd, maar het plan van de studenten moet een opsplitsing van het probleem in stappen bevatten die eenvoudig genoeg zijn om als pseudocode te worden beschouwd.