


Budowanie zachowań dla autonomicznej rutyny
Zawody VEX Robotics wymagają zaplanowania autonomicznego programu na 60-sekundowy mecz umiejętności programowania w ramach wyzwania Robot Skills Challenge oraz na 15-sekundowy okres autonomiczny gry z bieżącego roku. Zaprogramowanie robota do autonomicznego działania wymaga rozbicia tego, co robot musi zrobić, na programowalny kod oparty na zachowaniu.
Oto kilka typowych zachowań robota wyczynowego VEX:
-
Jazda do przodu i do tyłu
-
Skręcanie w prawo i w lewo
-
Chwytanie przedmiotu gry
-
Precyzyjne umieszczanie obiektu gry
-
Sortowanie pomiędzy różnymi obiektami w grze
Kiedy już zbudujesz podstawowe instrukcje dotyczące tego typu zachowań, wykonanie udanej autonomicznej procedury oznacza po prostu zaplanowanie kolejności tych działań!
![]() Motywuj do dyskusji
-
Zachowania zautomatyzowane
Motywuj do dyskusji
-
Zachowania zautomatyzowane
Wyświetl obraz pola zawodów VEX Robotics Competition dla gry z bieżącego roku lub możesz użyć tego obrazu z przejęcia wieży zawodów VEX Robotics Competition 2019-2020.
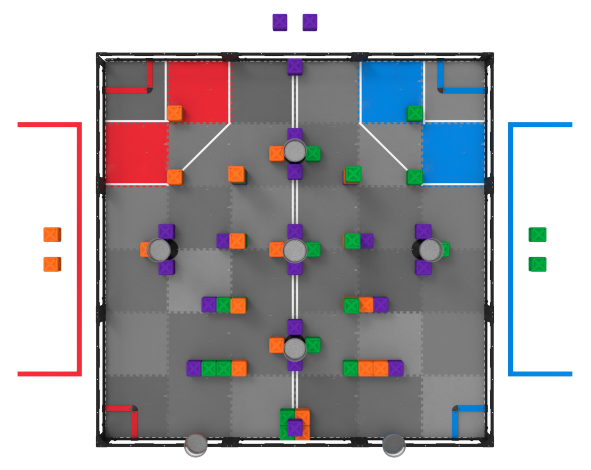
Zacznij od przedstawienia uczniom celu, który powinni zaplanować, ale upewnij się, że jest on odpowiedni do ich poziomu doświadczenia. Być może manipulator i czujniki robota nie zostały jeszcze omówione, dlatego należy zadbać o to, aby cel był możliwy do osiągnięcia za pomocą jedynie podstawowych ruchów. Na przykład poproś ich, aby zaplanowali, jak przejść z górnego czerwonego rogu pola powyżej do fioletowej kostki w prawym dolnym rogu, nie dotykając niczego innego na polu.
P: Jeśli musiałeś przenieść się z lewego górnego rogu do prawego dolnego rogu, jaki jest Twój pierwszy krok w planowaniu tego?
A: Odpowiedzi mogą być różne, ale powinny odnosić się do podziału zadania na mniejsze, programowalne zachowania lub zachowania, które odpowiadają instrukcjom VEXcode V5.
P: Jakie jest pierwsze zachowanie robota?
A: Odpowiedzią może być skręcenie w określonym kierunku lub jazda do przodu. Wszystkie akceptowalne odpowiedzi powinny odpowiadać pojedynczym instrukcjom.
P: Co musiałbyś zrobić, aby zaprogramować skręty lub jazdę? Jakie pomiary byłyby potrzebne?
A: W przypadku programu autonomicznego bez czujników konieczne byłoby dokładne określenie odległości skrętu i przejazdu.
![]() Rozszerz swoją naukę
-
Szkic i pseudokod
Rozszerz swoją naukę
-
Szkic i pseudokod
Aby rozszerzyć to ćwiczenie, poproś uczniów, aby naszkicowali pole wyzwania (rzeczywiste lub stworzone) do skalowania, a następnie napisali pseudokod (Google / .docx / .pdf ) dla 15-sekundowego programu autonomicznego. Na tym laboratorium nie wprowadzono pseudokodu, ale planując za pomocą prostych zachowań, uczniowie zaczęli już ćwiczyć pisanie pseudokodu. Praktyki pisania pseudokodu opisanej w linku nie trzeba przedstawiać, ale plan uczniów powinien uwzględniać rozbicie problemu na kroki na tyle podstawowe, aby można je było uznać za pseudokod.