
![]() 教師用ツールボックス
-
このアクティビティの目的
教師用ツールボックス
-
このアクティビティの目的
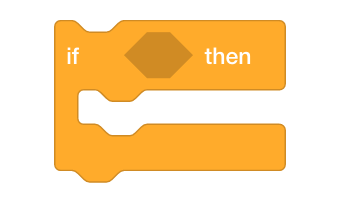
条件付きプログラミングは、プロジェクト内で [If then] ブロックを使用することで実現できます。
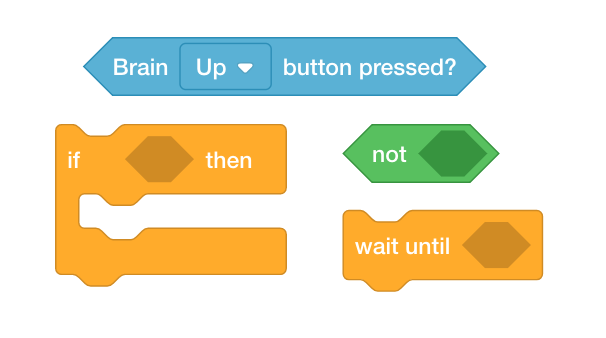
このアクティビティでは、 [If then] ブロックを使用したプログラミングと、センシング ブロックとオペレーター ブロックを使用してロボットに Brain Up ボタンが押されたかどうかをチェックさせる方法を学生に紹介します。 押すとクローボットの腕が上がります。 この最初の導入は、脳上の他のボタンにロボットの反応を追加するための基礎を築きます。
[If then]、[Brain button pressed]、[Wait until] 、または <not> ブロックの詳細については、VEXcode IQ 内のヘルプ情報を参照してください。 この組み込みヘルプ ツールの詳細については、 ここをクリックしてください。
以下は、生徒がこのアクティビティで行うことの概要です。
-
ループの使用 および If-Then-Else ブロック チュートリアル ビデオをご覧ください。
-
Clawbot (Drivetrain) テンプレートを使用して、提供されている ArmUp プロジェクトを構築し、プロジェクトの動作を予測します。
-
プロジェクト内のブロックの流れを説明するフローチャートを表示します。
-
ArmUp プロジェクトが何を行うかについての説明を洗練させます。
-
[Wait until] ブロックを追加してプロジェクトを編集します。
-
立ち止まって話し合う: 生徒は、プロジェクトで Clawbot に何をさせるかについて、実際の観察と比較して予測を振り返ります。
| 量 | 必要な材料 |
|---|---|
| 1 |
VEX IQ スーパーキット |
| 1 |
VEXコードIQ |
| 1 |
エンジニアリングノート |
| 1 |
クローボット (ドライブトレイン) テンプレート |
Clawbot は決断を下す準備ができています。
このアクティビティでは、ロボットに条件付きの動作をプログラムするためのツールが提供されます。
[If then] ブロックがアクティビティ内の主な焦点ですが、他の Sensing、Control、および Operator ブロックも使用されます。
VEXcode IQ 内のヘルプ情報を使用して、ブロックについて学ぶことができます。 ヘルプ 機能の使用方法については、「ヘルプの使用」チュートリアルを参照してください。

![]() 教師へのヒント
教師へのヒント
学生が VEXcode IQ を初めて使用する場合は、ツールバーのチュートリアルを参照して、他の基本的なスキルを学ぶこともできます。

ステップ 1: ループと条件文を理解することから始めましょう。
条件付きプログラミングを開始する前に、まず VEXcode IQ のループと If-Then-Else の使用に関するチュートリアル ビデオをご覧ください。
まず、VEXcode IQ の ループの使用 チュートリアル ビデオをご覧ください。
次に、VEXcode IQ の If-Then-Else チュートリアル ビデオをご覧ください。
ステップ 2: 条件付きプログラミング。
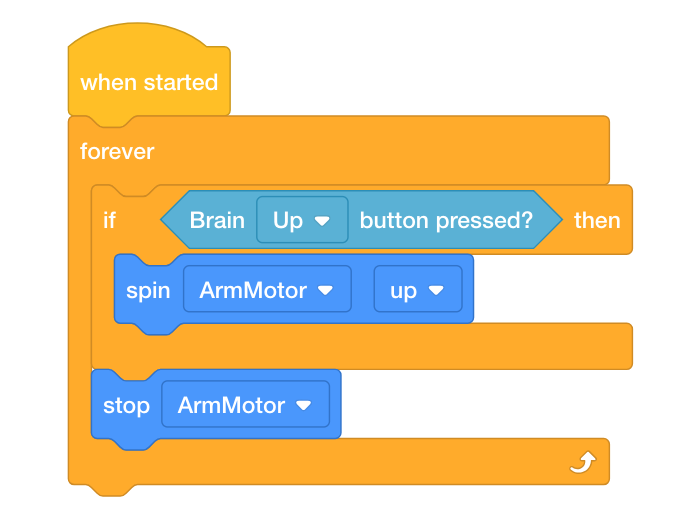
Brain Up ボタンが押されたという条件が真の場合に腕を上げるプロジェクトを構築したいと考えています。

条件が false の場合、アーム モーターは停止します。 [Forever] ブロックと [If then] 条件ブロックを使用してアームをプログラムするプロジェクトの構築を検討してみましょう。
- Clawbot (ドライブトレイン) テンプレートを開きます。 ヘルプについては、「サンプル プロジェクトとテンプレートの使用」チュートリアル ビデオをご覧ください。
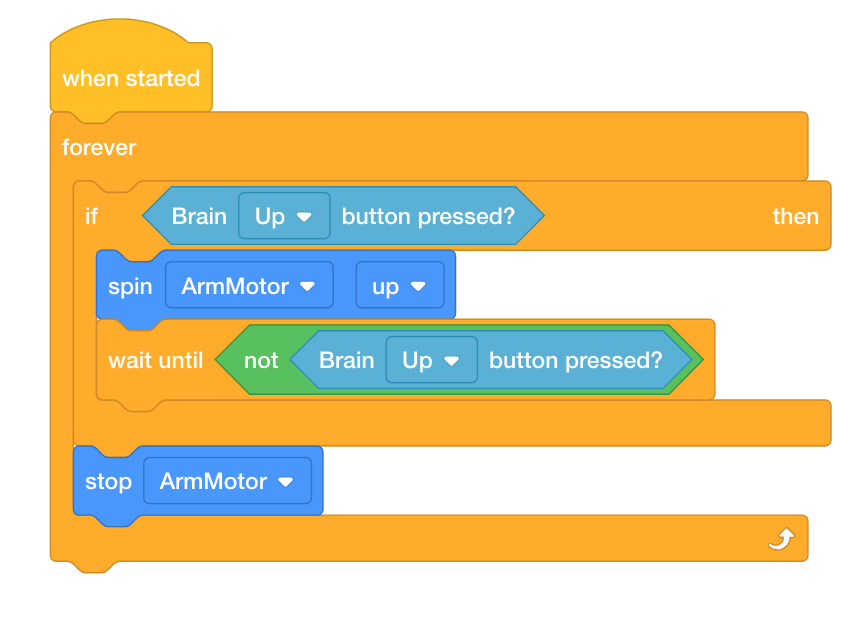
- 以下のプロジェクトをビルドします。
- プロジェクトを ArmUp として保存します。 学生がプロジェクトの保存についてサポートが必要な場合は、VEXcode IQ の名前付けと保存チュートリアル ビデオを参照してください。

- プロジェクト名 ArmUp がツールバーの中央のウィンドウに表示されていることを確認します。
- エンジニアリング ノートでプロジェクトの Clawbot に何をさせるかを予測します。 ユーザーと Clawbot の両方の動作を説明します。
- プロジェクトが Clawbot に何をさせるかについての予測が正しいかどうかをテストして確認します。
- プロジェクトを Clawbot の スロット 1 にダウンロードし、実行します。
- プロジェクトのダウンロードと実行のヘルプについては、プロジェクトのダウンロードと実行方法を説明する VEXcode IQ のチュートリアルを参照してください。

- プロジェクトの説明を確認し、必要に応じてメモを追加して修正します。
![]() 教師用ツールボックス
教師用ツールボックス
上記で学生が構築したプロジェクトは、そのままでは機能しません。 プロジェクトのフローの速度のため、[待機] ブロックが必要です。 そこに存在しない場合、アーム モーターが応答する前にプロジェクトは次のブロックに移動します。 したがって、ブロックは [Stop Motor] ブロックまで流れてから、[Forever] ブロックがその中に含まれるすべてのブロックを繰り返すため、スタックの一番上に戻り始めます。 これについては、次のステップで検討して生徒に説明します。
![]() 教師用ツールボックス
-
立ち止まって話し合う
教師用ツールボックス
-
立ち止まって話し合う
生徒たちはプロジェクトをテストしたので、自分たちの予測と観察を比較してどうだったかを尋ねます。 次の質問をすることで、ディスカッションを促進します。
-
あなたの予測は観察と同じでしたか?
-
プロジェクトでは何が起こっているようですか?
-
上ボタンの押下状態を確認するのは1回だけですか?
-
プロジェクトが適切に機能するためには、プロジェクトに何を追加する必要があると思いますか?
ステップ 3: [待機] ブロックを理解します。
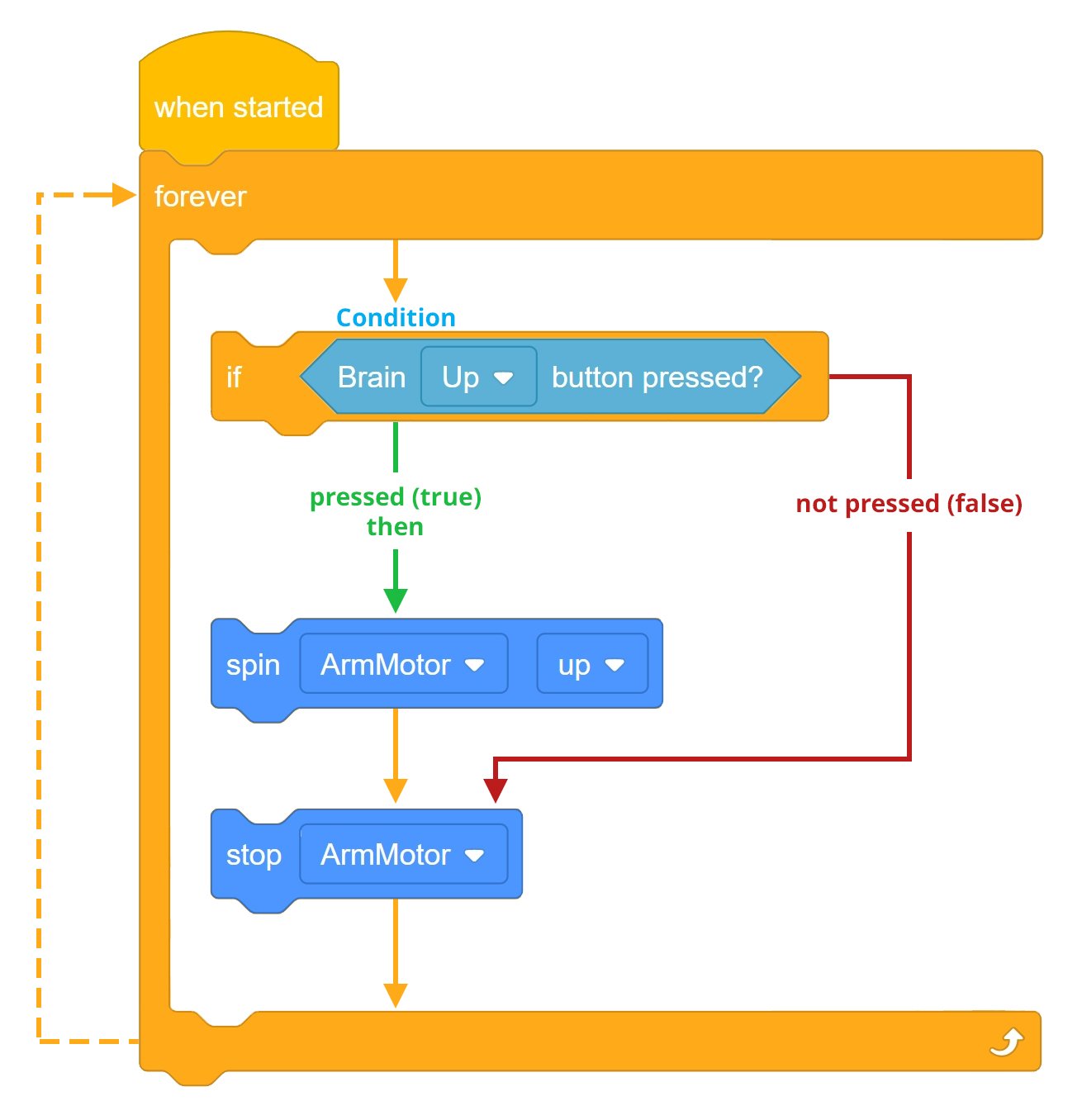
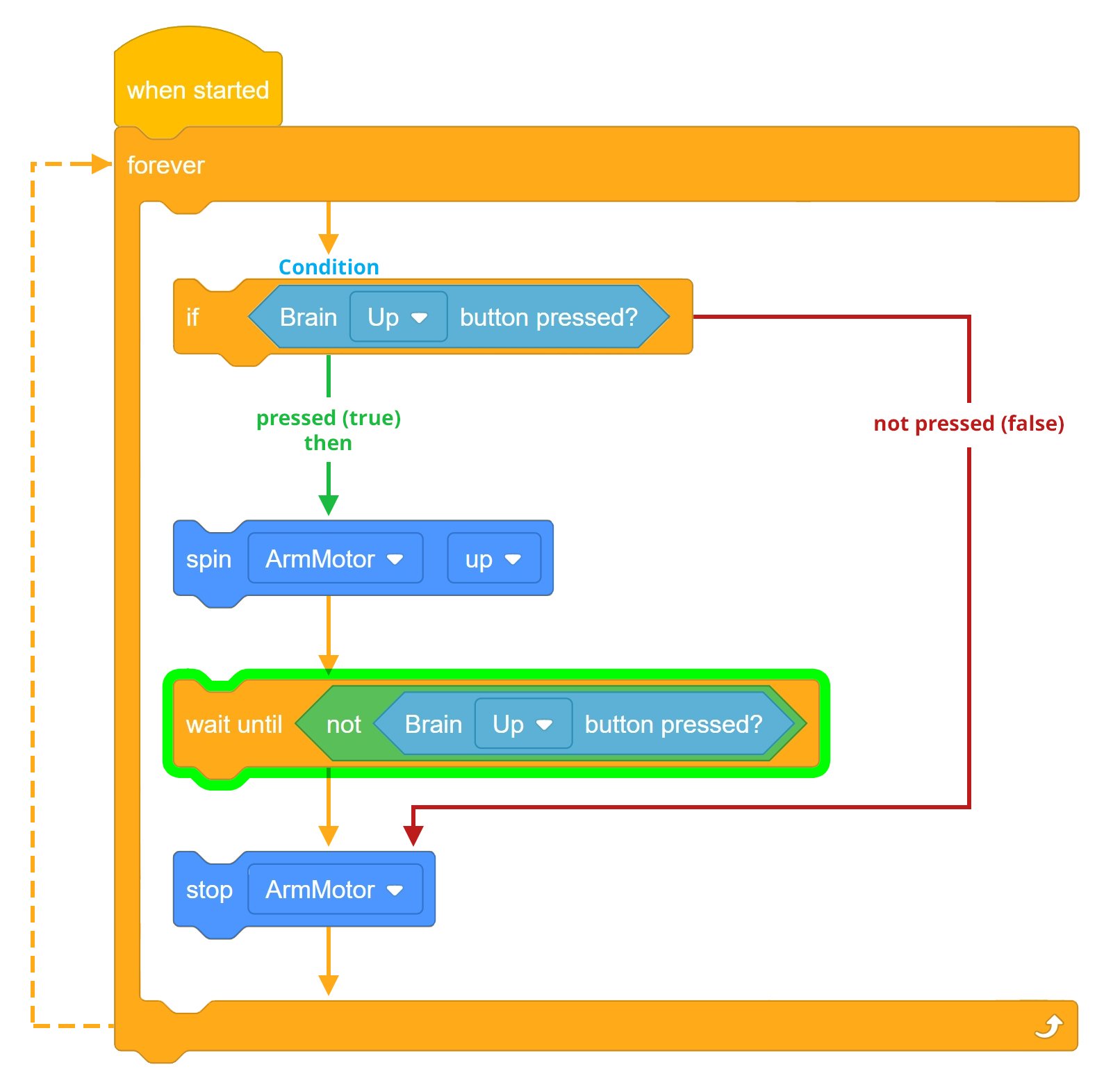
前のステップでは、プロジェクトはアームを正常に持ち上げることができませんでした。 プロジェクトの流れを説明する次のフローチャートをご覧ください。 Brain Up ボタンを押すと、プロジェクトの流れが非常に早くなり、プロジェクトが次のブロックである [Stop Motor] ブロックに移動することに注意してください。
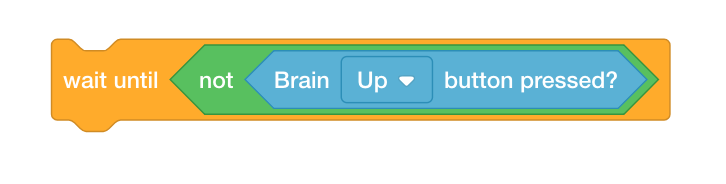
したがって、プロジェクトには、Brain Up ボタンが放されるまでアーム モーターに回転を続けるように指示する [Wait until] ブロックが必要です。
プロジェクトのフローの速度のため、[Wait until] ブロックが必要です。 それが存在しない場合、アーム モーターが応答する前にプロジェクトは次のブロックに移動することになります。 したがって、[Forever] ブロックがその中に含まれるすべてのブロックを繰り返すため、ブロックは [Stop Motor] ブロックまで流れてからスタックの先頭に戻ります。
[Wait until] ブロックを追加して、プロジェクトの変更を検討してみましょう。 アームモーターは、Brain Up ボタンが放されるまで回転し続けます。 Brain Up ボタンを放すと、プロジェクトは次のブロックである [モーターの停止] ブロックに進みます。
プロジェクトはまず、Brain Up ボタンが押されているかどうかを確認します。 Brain Up ボタンが押されている (TRUE) 場合、Brain Up ボタンが放されるまでアームは回転します。 Brain Up ボタンを放すと、プロジェクトは [モーターの停止] ブロックに移動し、その後 [永遠] ブロックがあるため、スタックの一番上に戻って再び開始されます。
Brain Up ボタンが押されていない場合 (FALSE)、 [Forever] ブロックのため、プロジェクトはスタックの一番上に戻って再開する前に [モーター停止] ブロックに移動し、アームは回転しません。 。
![]() ディスカッションの動機付け
ディスカッションの動機付け
Q: 待機ブロックを使用していない場合、Brain Up ボタンを押すとどうなりますか?
A: プロジェクト フローの速度により、プロジェクトは [Spin] ブロックから [Stop Motor] ブロックに、Arm Motor が応答できるよりも早く移動します。 したがって、腕は動きません。
Q: 上記のプロジェクトのブロックまで待機する目的は何ですか?
A: 待機ブロックにより、Brain Up ボタンが放されるまでアームが回転し続けることができます。
Q: ブレインアップボタンを押している状態がFALSE(解除)の場合、プロジェクトの流れはどうなりますか?
A: 条件が false の場合、プロジェクト フローは [モーターの停止] ブロックに進み、スタックの先頭に戻り、永久に繰り返します。
ステップ 4: [待機] ブロックを追加します。
[Wait until] ブロックを追加しましょう。
-
[Wait until] ブロックを ArmUp プロジェクトに追加して、プロジェクトが次のようになります。
-
プロジェクトを ArmUp2 として保存します。 学生がプロジェクトの保存についてサポートが必要な場合は、「名前付けと保存」チュートリアルを参照してください。

-
プロジェクトを Clawbot の スロット 2 にダウンロードし、実行します。
- プロジェクトのダウンロードと実行のヘルプについては、プロジェクトの と実行方法を説明する VEXcode IQ のチュートリアルを参照してください。
-
Brain Up ボタンを押したときにアームが回転するかどうかをテストします。
-
Brain Up ボタンが押されていない (放されている) とアーム モーターが停止することを確認します。
-
[Wait until] ブロックをプロジェクトに追加する前後で Clawbot がどのように動作したかを観察し、エンジニアリング ノートに書き留めます。
![]() 教師用ツールボックス
-
立ち止まって話し合う
教師用ツールボックス
-
立ち止まって話し合う
学生が待機ブロックを追加する前と追加した後にプロジェクトをテストした後、これにより Brain Up ボタンが放されるまでアームがどのように回転し続けることができるかを学生と話し合います。 生徒に、工学ノートから観察したことを共有してもらいます。 次の質問をしてディスカッションを促進します。
-
wait until ブロックを追加する前に、初めてプロジェクトが機能すると思いましたか?
-
最初のプロジェクトをテストしたことで、そのプロジェクトに問題があることがどのように認識できましたか?
-
Brain Up ボタンの状態はプロジェクト内で 1 回だけチェックされますか?
学生のエンジニアリング ノートは、個人 (Google / .docx / .pdf) またはチーム (Google / .docx / .pdf) として管理および採点できます。 前のリンクでは、アプローチごとに異なるルーブリックが提供されています。 教育計画にルーブリックが含まれる場合は、活動を開始する前にルーブリックについて説明するか、少なくともコピーを生徒に渡すことをお勧めします。