STEM LabsVEX GO
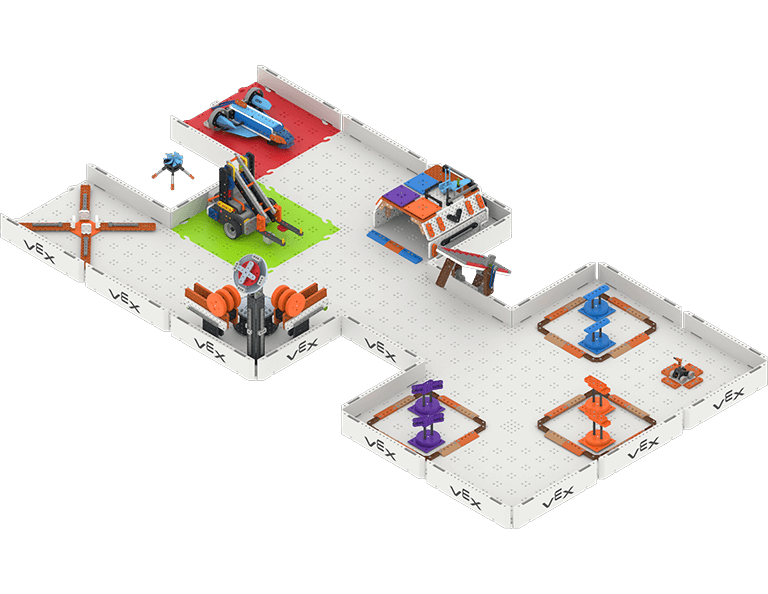
Expedição Matemática a Marte
5 Laboratórios
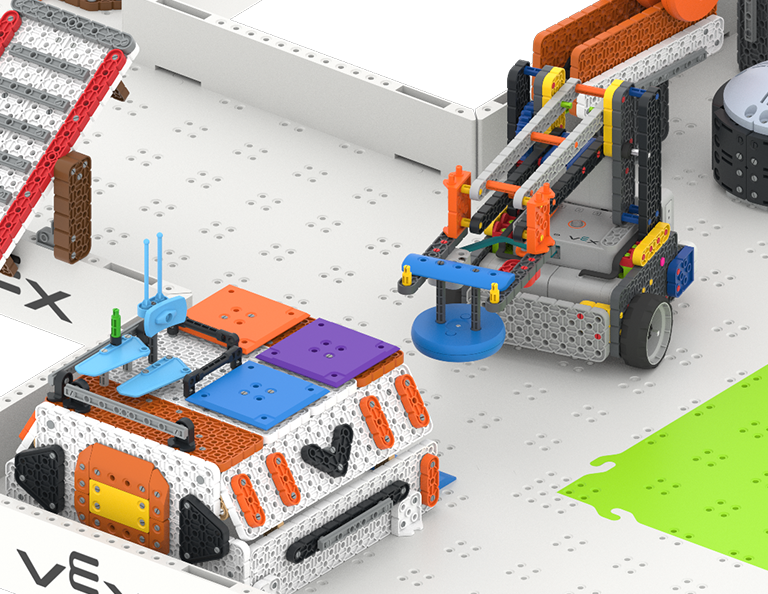
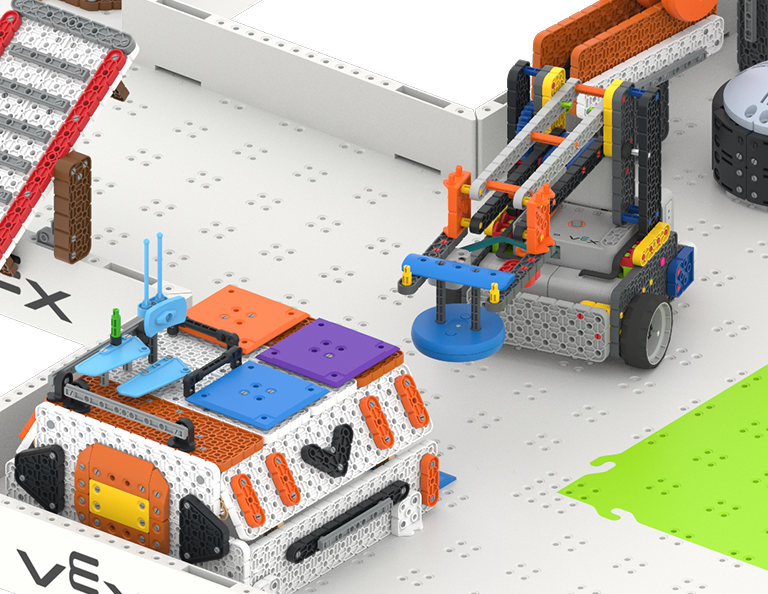
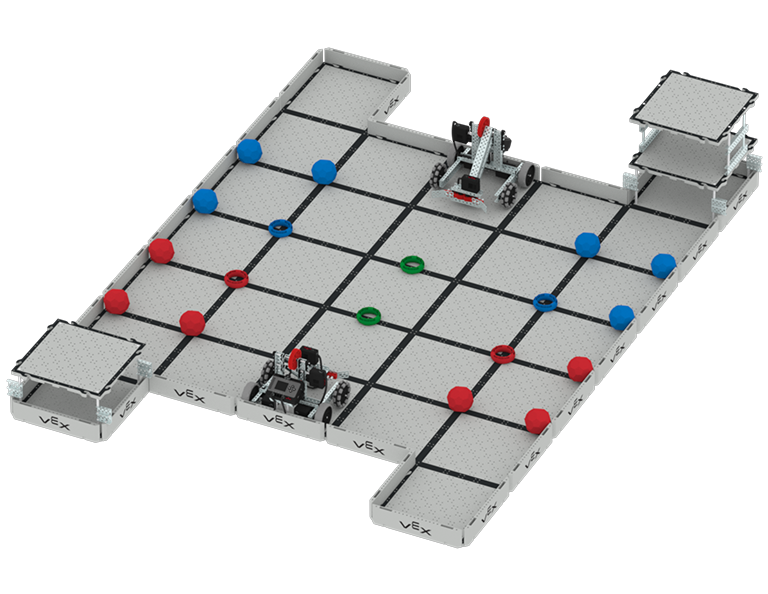
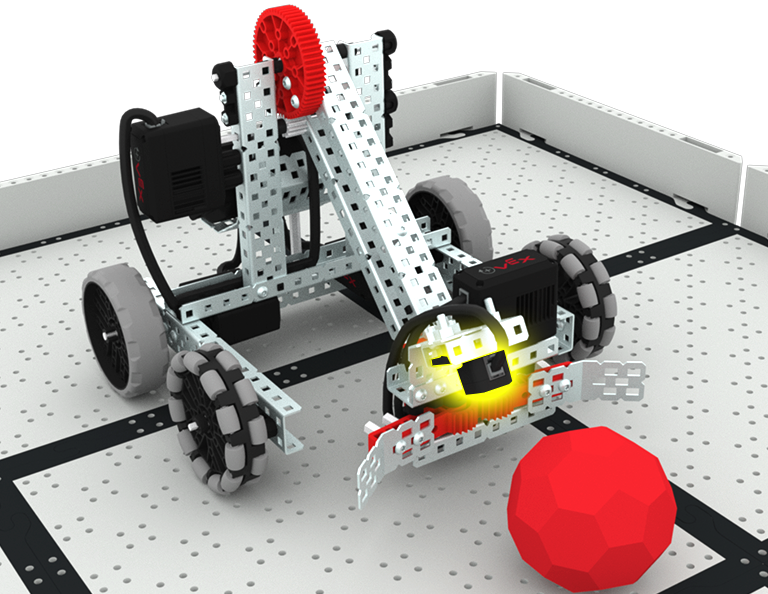
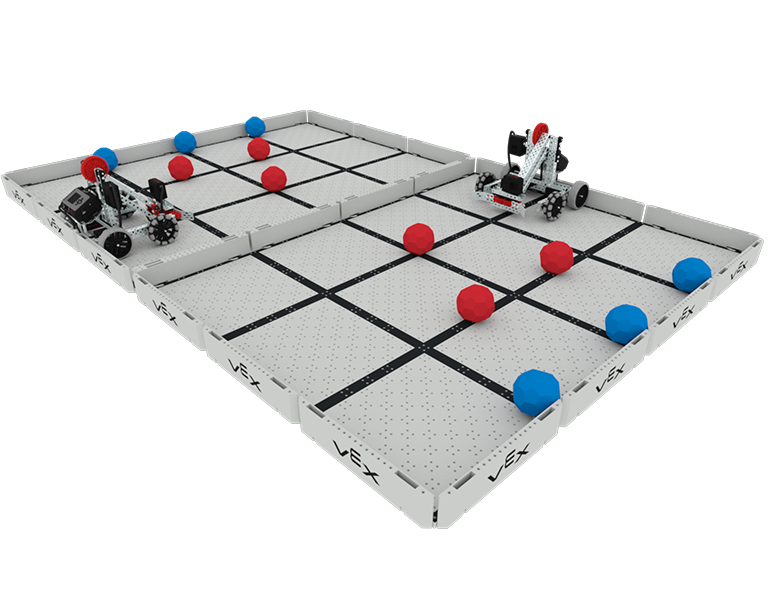
Nesta Unidade de Laboratório STEM da Competição VEX GO, os alunos conduzirão um robô herói para coletar amostras, resgatar um rover, levantar um foguete e muito mais na Competição de Expedição Matemática a Marte!
Laboratório: 1
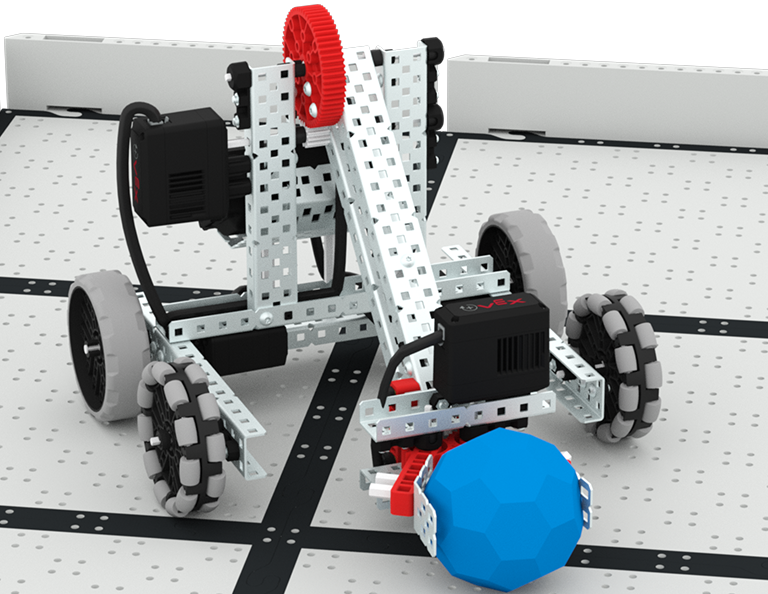
Coleta de crateras
Conduza o seu robô para recolher amostras e libertar um rover de uma cratera na Competição de Coleção de Crateras!
Como posso remover amostras das crateras na Expedição Matemática a Marte?
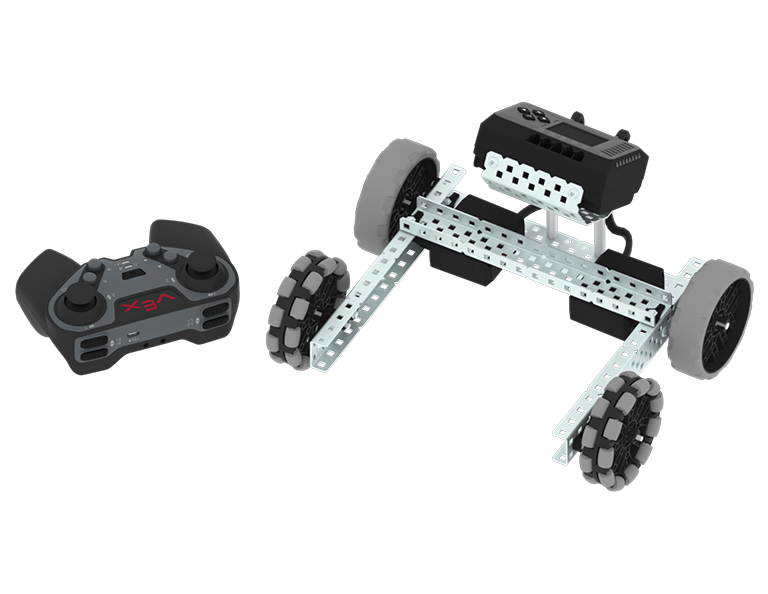
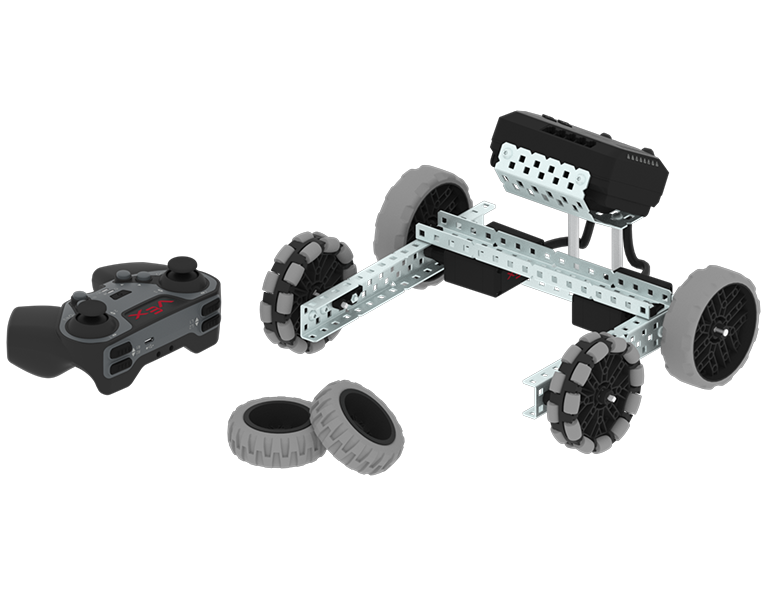
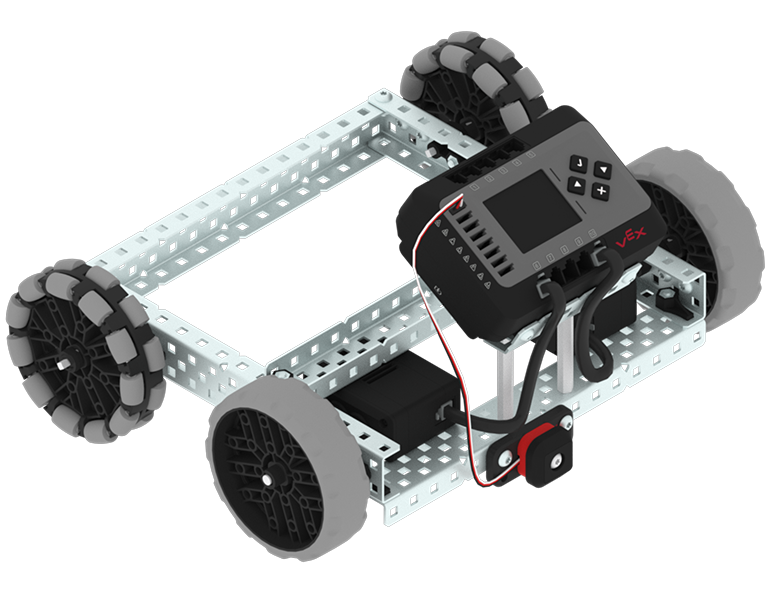
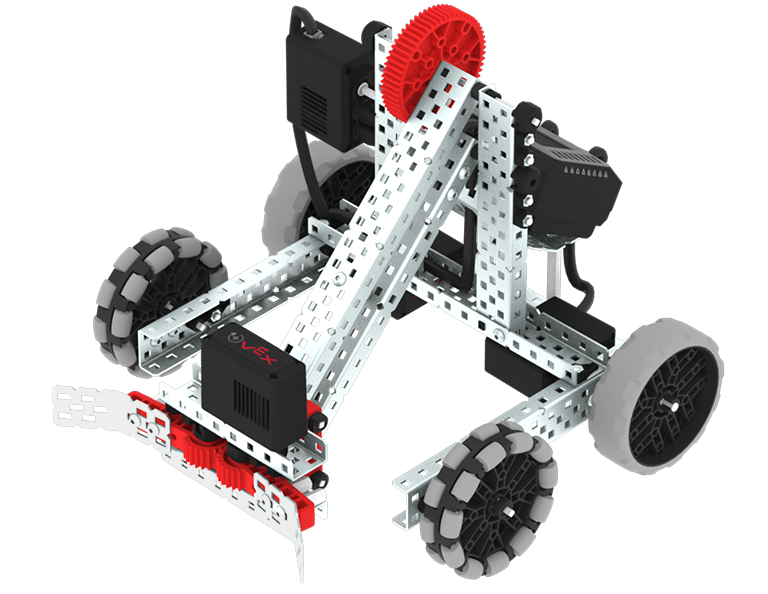
Construir: Competição Advanced Hero Robot 2.0
Utiliza o Estágio 1 do Campo de Competição Mars Math Expedition GO
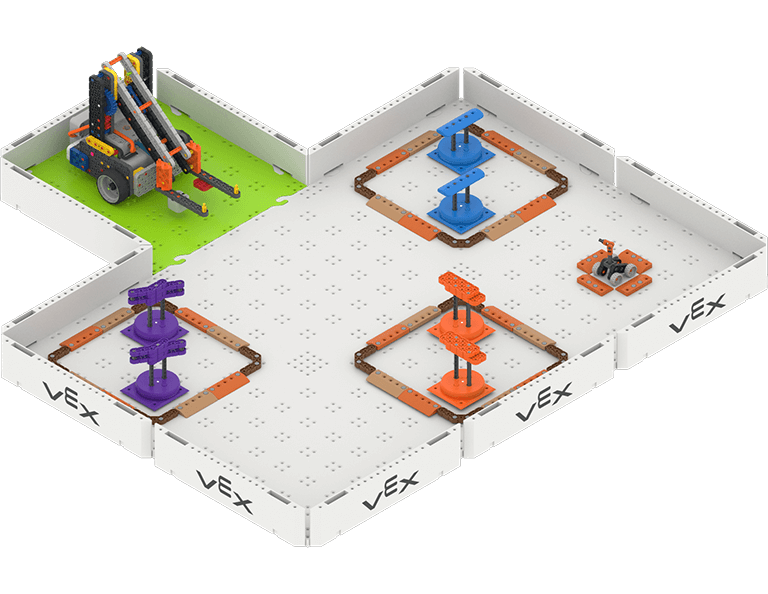
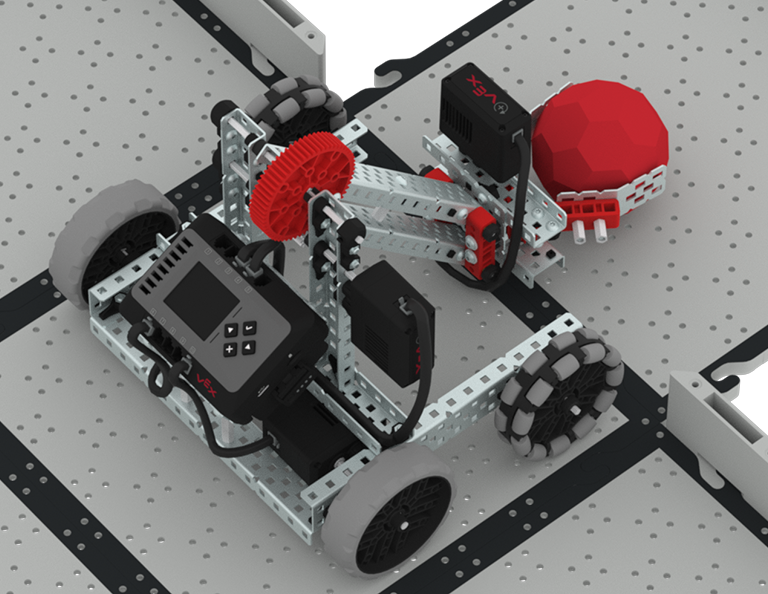
Laboratório: 2
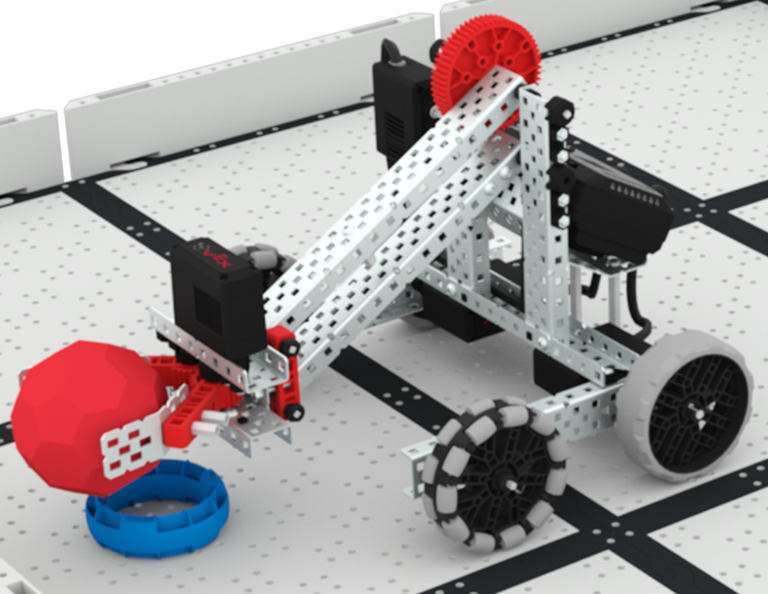
Levante para o laboratório
Conduza o seu robô para recolher e colocar amostras no Laboratório no Elevador para a Competição de Laboratório!
Como posso trabalhar com a minha equipa para mover amostras para o Laboratório na competição?
Construir: Competição Advanced Hero Robot 2.0
Utiliza o Estágio 2 do Campo de Competição Mars Math Expedition GO
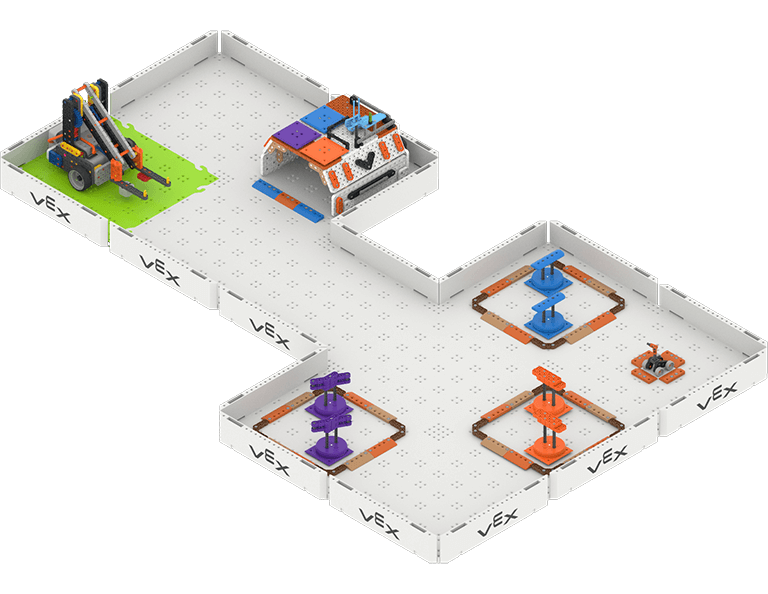
Laboratório: 3
Desapareça!
Conduza seu robô para levantar o foguete e limpar o campo de pouso para o helicóptero na decolagem! Concorrência.
Como posso trabalhar com a minha equipa para competir no Blast Off! Competição?
Construir: Competição Advanced Hero Robot 2.0
Utiliza o Estágio 3 do Campo de Competição Mars Math Expedition GO
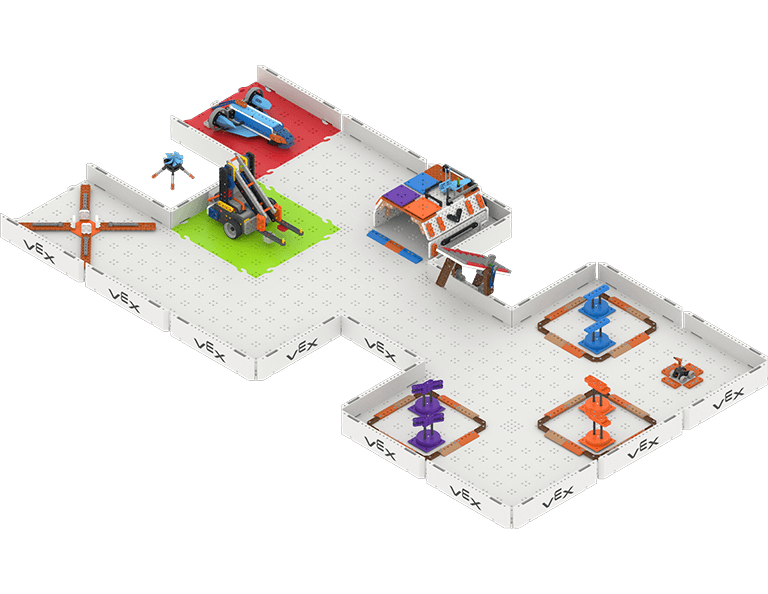
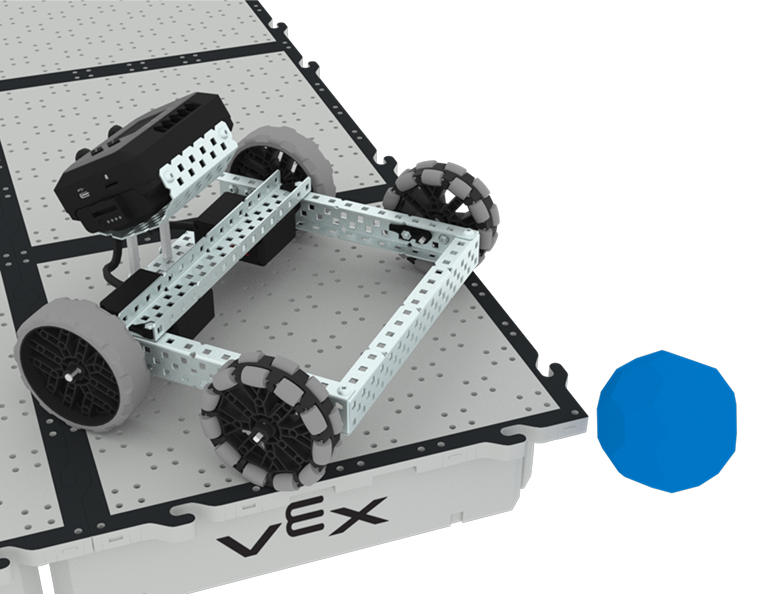
Laboratório: 4
Frenesi da Célula de Combust
Remova as Células de Combustível de seus berços e leve-as para vários lugares no Campo usando o seu Robô Herói da Competição VEX GO na Competição Frenesi de Células de Combustível.
Como posso trabalhar com a minha equipa para mover Células de Combustível numa competição?
Construir: Competição Advanced Hero Robot 2.0
Utiliza o Estágio 4 do Campo de Competição Mars Math Expedition GO
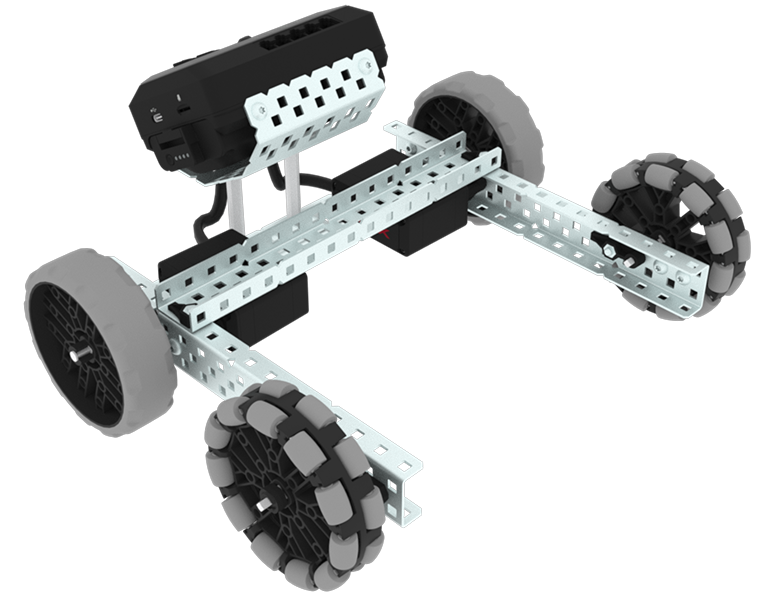
Laboratório: 5
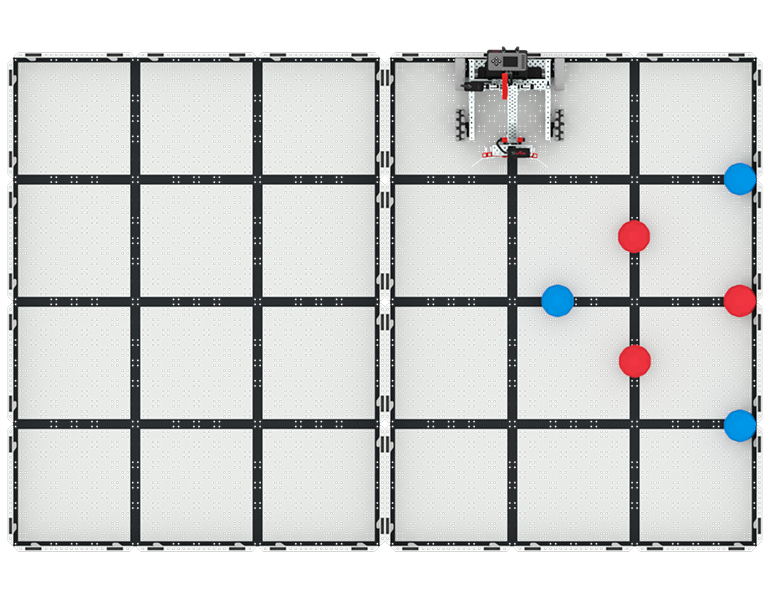
Competição de Expedição Matemática a Marte
Pegue todas as habilidades que você aprendeu nos Laboratórios anteriores e combine-as para formar uma estratégia de jogo vencedora na Expedição Matemática a Marte!
Como posso trabalhar com a minha equipa para marcar mais pontos numa competição?
Construir: Competição Advanced Hero Robot 2.0
Uses the full Mars Math Expedition GO Competition Field
STEM LabsVEX 123

Mover do Toque para o Codificador
2 Laboratórios
Use o que você sabe sobre codificação com os botões Touch para aprender a codificar o robô 123 usando os cartões Coder e Coder.


STEM LabsVEX 123
Encontrar o Bug
2 Laboratórios
Erros no nosso código nos ajudam a aprender! Pratique o uso de um processo de depuração para identificar, encontrar e corrigir bugs em projetos para que o robô 123 possa se mover da maneira que queremos.
Plataformista
6 Lições
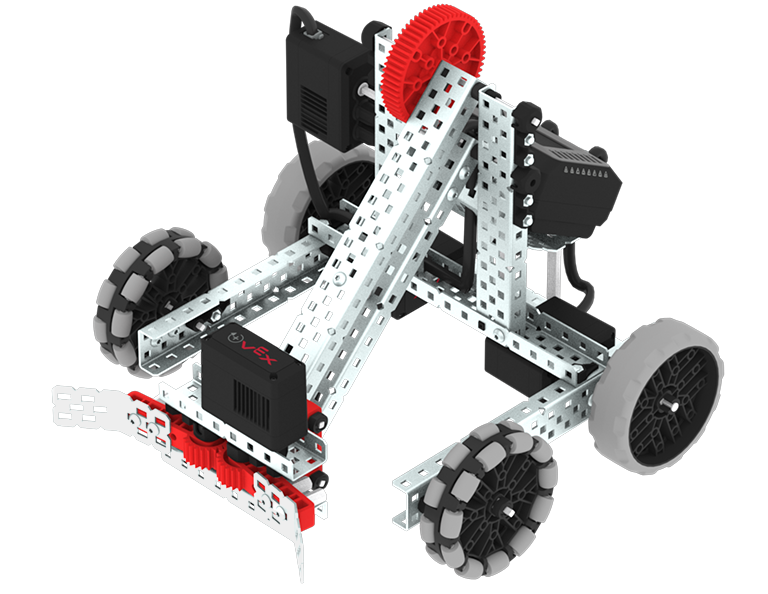
Nesta Unidade, você explorará maneiras de usar manipuladores em seu Clawbot, incluindo elevadores, para mover Buckyballs e anéis para plataformas de diferentes níveis. Você usará esse conhecimento para cooperar com outra equipe para criar uma estratégia que combine o design do robô e as habilidades do motorista para competir na Competição Platform Placer!
Visite o Portal do Professor para obter materiais de apoio ao professor e vídeos sobre o conteúdo e a facilitação das Lições do Platform Placer.
Lição 1: Introdução
Nesta Lição, você será apresentado à Competição de Plataformas, criará o Clawbot e se preparará para programar.
Lição 2: Manipulação de Vários Objetos
Nesta lição, você aprenderá sobre manipuladores e como projetar um manipulador eficaz para realizar uma tarefa, para que você possa conduzir o Clawbot para marcar anéis e Buckyballs em diferentes plataformas. Em seguida, você participará do Desafio Empurrar e Colocar.
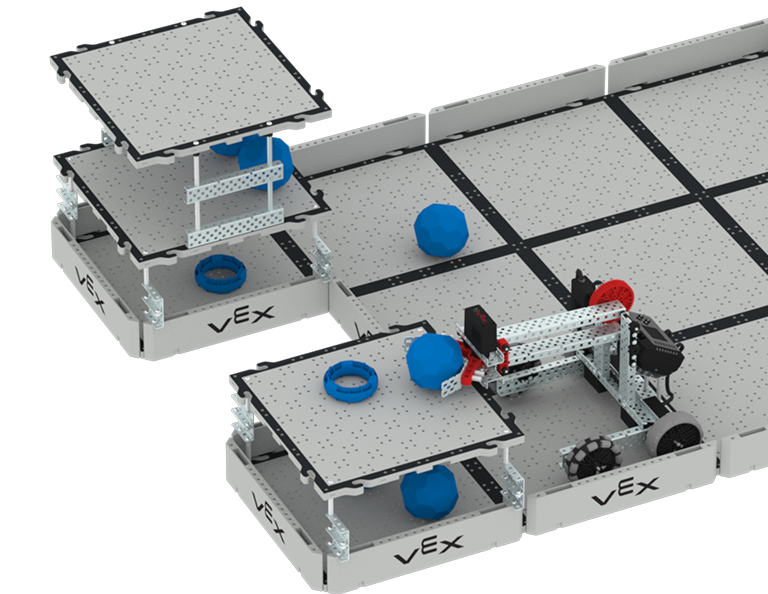
Lição 3: Projetar Elevadores
Nesta lição, você aprenderá sobre o design de elevadores, para que possa pontuar objetos de jogo na plataforma alta e participar do Lift and Score Challenge.
Lição 4: Desenvolvendo uma Estratégia
Nesta Lição, você aprenderá sobre a estratégia do jogo e como organizar o desenvolvimento da sua estratégia com a sua equipe, para que possa criar uma estratégia vencedora para competir no Desafio de Estratégia Compartilhada.
Lição 5: Competição de Plataformas
Nesta lição, você aplicará seu aprendizado das lições anteriores para competir na competição Platform Placer!

Lição 6: Conclusão
Nesta Lição, irá refletir sobre a Unidade e identificar ligações entre o que fez e uma carreira STEM ligada.
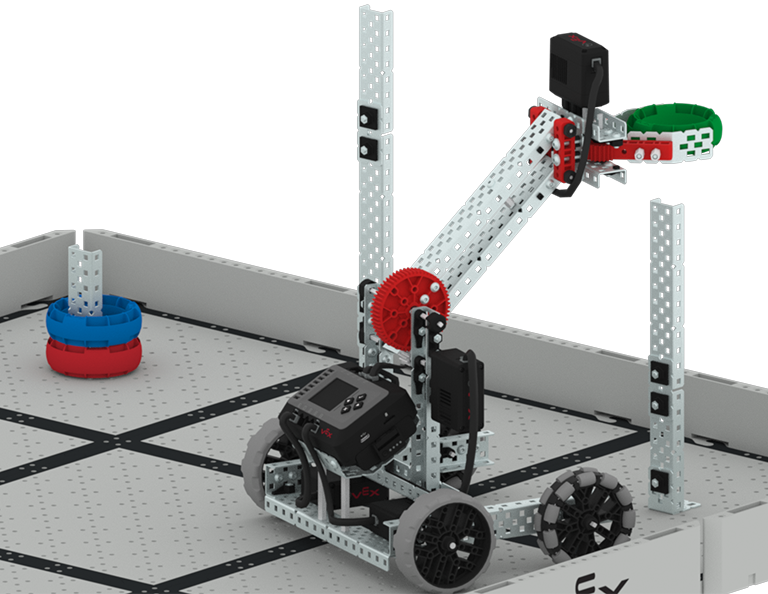
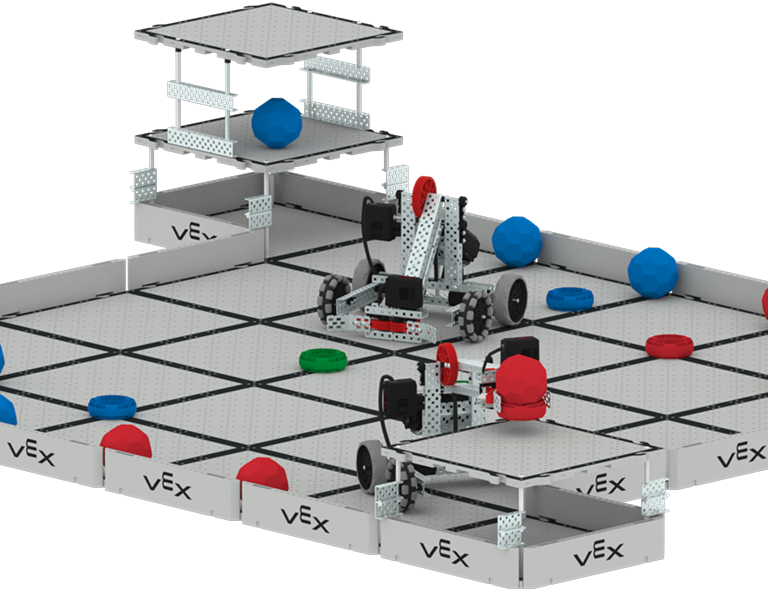
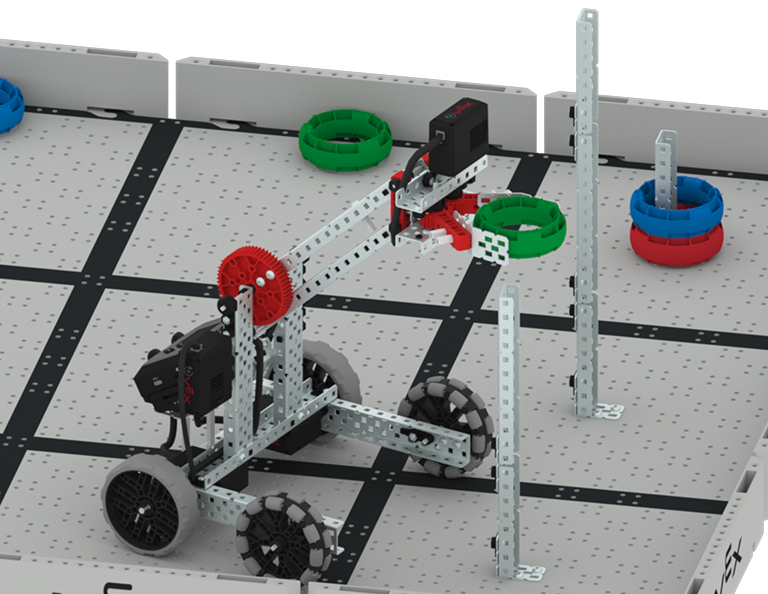
Líder do Anel
6 Lições
Nesta Unidade, irá explorar a diferença entre o controlo do condutor e o movimento autónomo, uma vez que utiliza vários programas (controlo autónomo e do condutor) para marcar anéis em postes de diferentes tamanhos na competição Ring Leader!
Visite o Portal do Professor para obter materiais de apoio ao professor e vídeos sobre o conteúdo e a facilitação das Lições do Ring Leader.
Lição 1: Introdução
Nesta Lição, você será apresentado à Competição de Líderes de Anel, construirá o Clawbot e se preparará para programar.
Lição 2: Controlo do Condutor
Nesta Lição, você aprenderá sobre como usar o Programa de Controle de Pilotos no Cérebro EXP para que possa dirigir o Clawbot para manipular anéis no Campo e participar do Desafio de Velocidade e Pontuação.
Lição 3: Codificação para Movimentos Autônomos
Nesta lição, aprenderá a codificar o seu robô para movimentos autónomos, incluindo como planear o caminho do seu robô. Em seguida, você criará um projeto VEXCODE EXP para colocar anéis nas postagens do Desafio Coding Crunch.
Lição 4: Usando Múltiplos Programas (Autônomo e Motorista)
Nesta lição, você aprenderá sobre como personalizar os controles do driver e como usar o controlador e o VEXcode EXP para otimizar sua estratégia de driver para competir no Desafio de Decisão Dividida.
Lição 5: Competição de Líderes de Anel
Nesta lição, você aplicará seu aprendizado das lições anteriores para competir na competição Ring Leader!
Lição 6: Conclusão
Nesta Lição, irá refletir sobre a Unidade e identificar ligações entre o que fez e uma carreira STEM ligada.
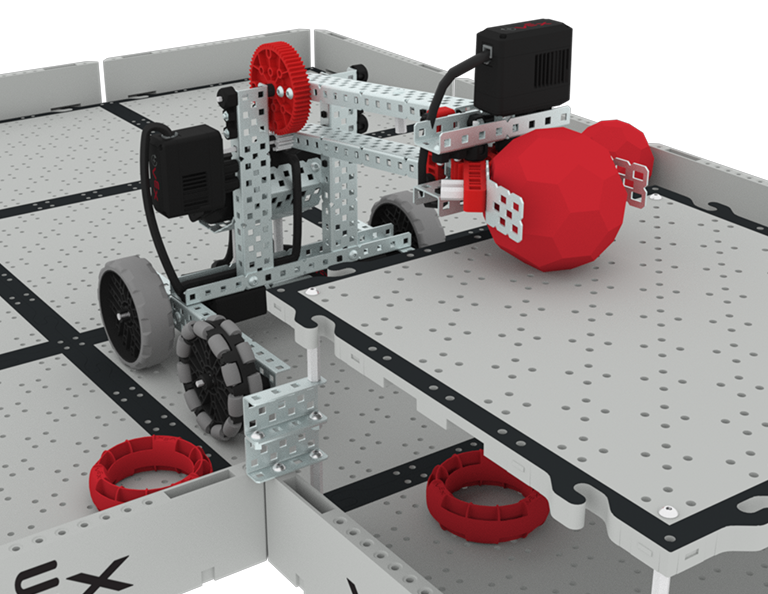
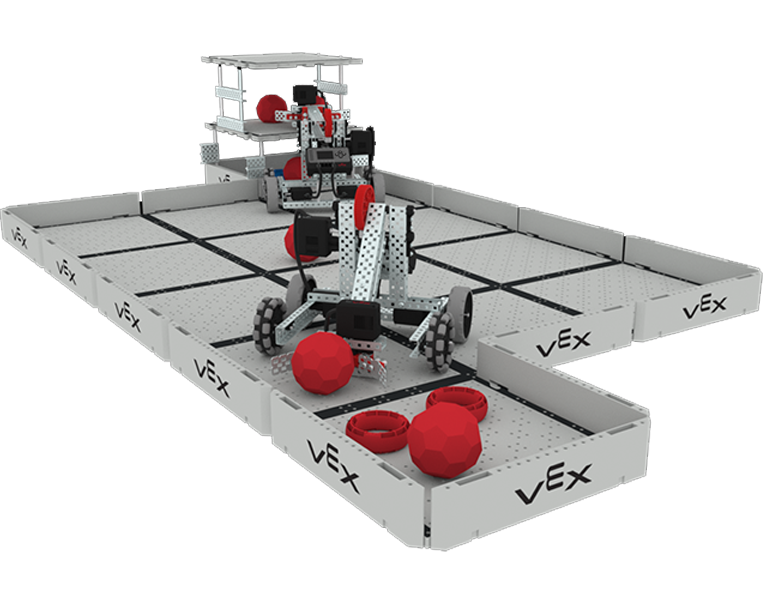
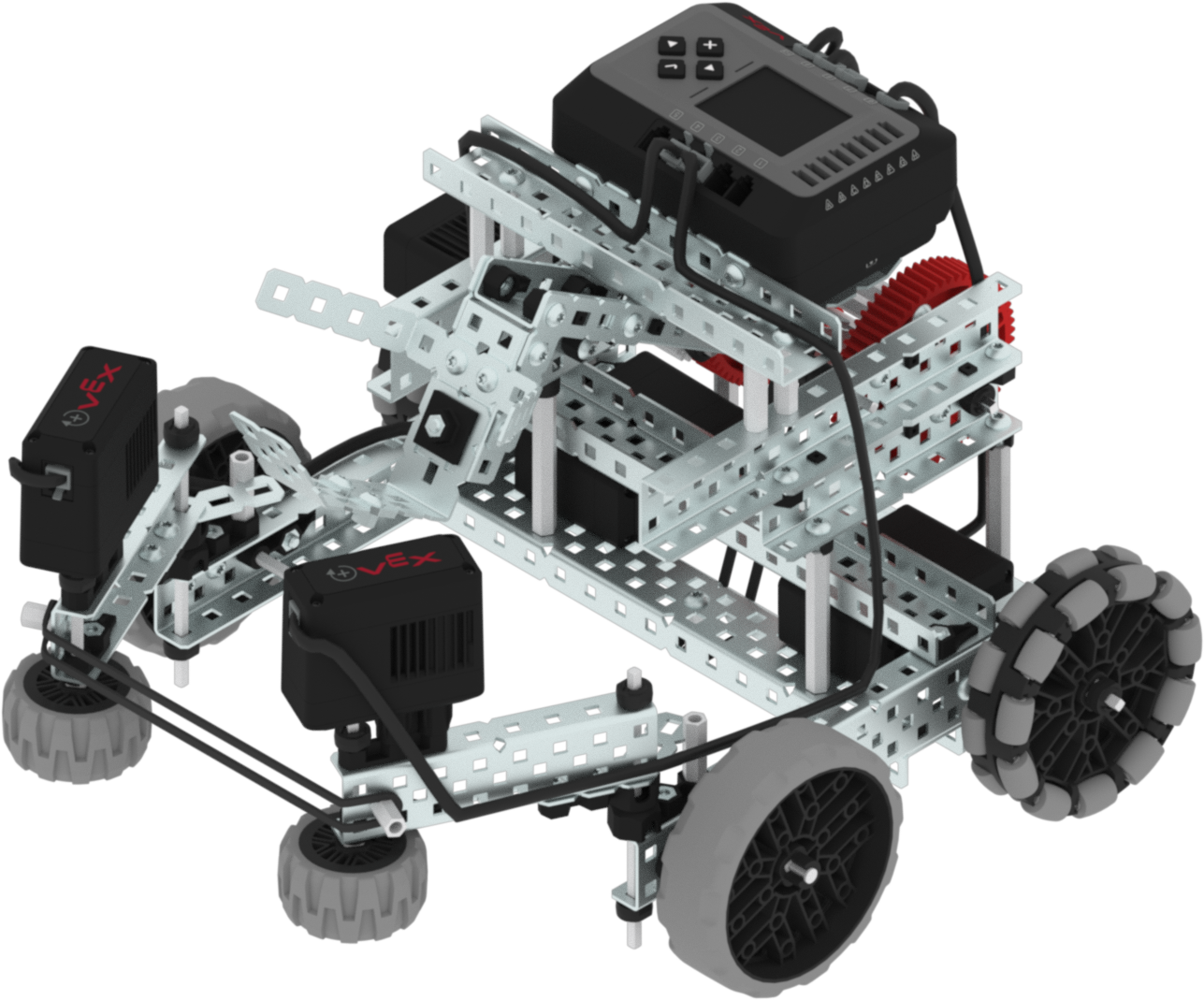
Basquetebol Bucky
4 Lições
Nesta unidade, irás explorar como conduzir o CatapultBot para recolher, disparar e marcar Buckyballs em aros na competição Bucky Basketball!
Visite o Portal do Professor para materiais de apoio ao professor e vídeos sobre o conteúdo e a facilitação das aulas de basquetebol Bucky.
Lição 1: Introdução
Nesta lição, você construirá o CatapultBot e carregará o controlador e a bateria.
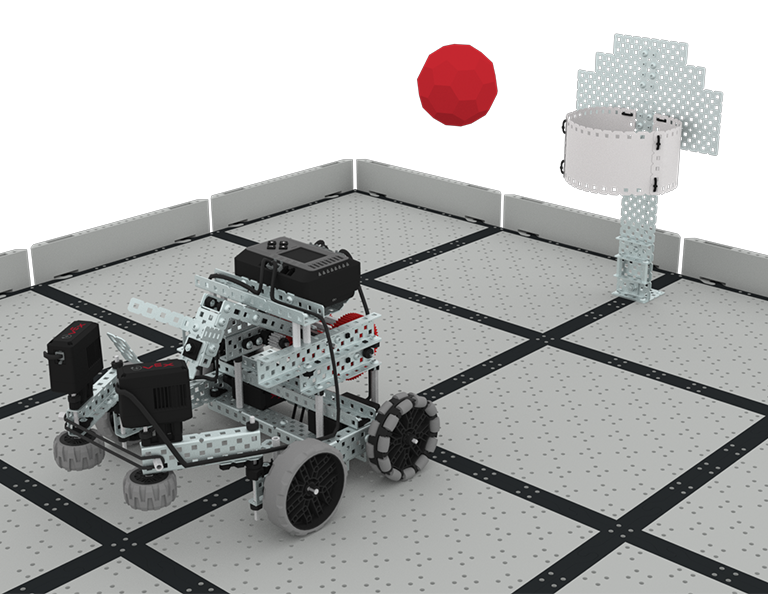
Lição 2: Conduzindo o CatapultBot
Nesta lição, você aprenderá como funciona a entrada e a catapulta do CatapultBot e como conduzi-lo usando o Controller para competir no Buckyball Basket Challenge!
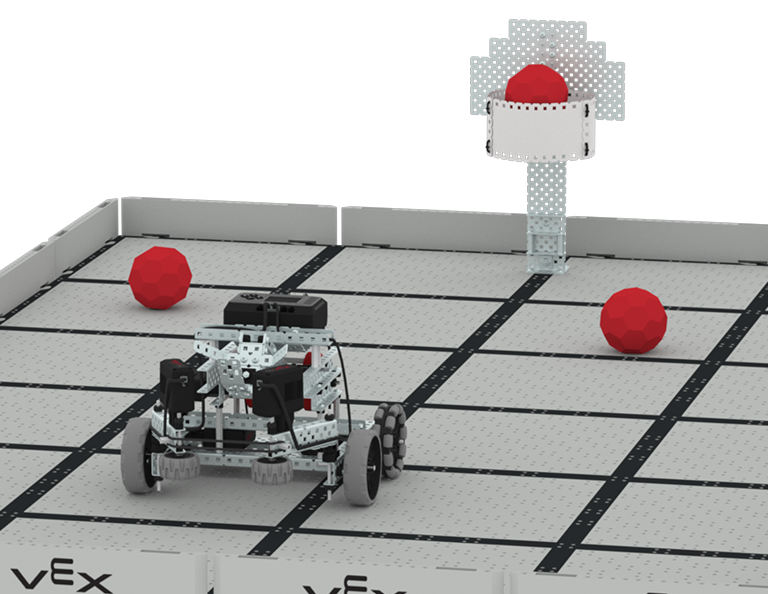
Lição 3: Competição de Basquetebol do Bucky
Nesta lição, você aplicará seu aprendizado das lições anteriores para competir na competição Bucky Basketball!
Lição 4: Conclusão
Nesta Lição, irá refletir sobre a Unidade e identificar ligações entre o que fez e uma carreira STEM ligada.
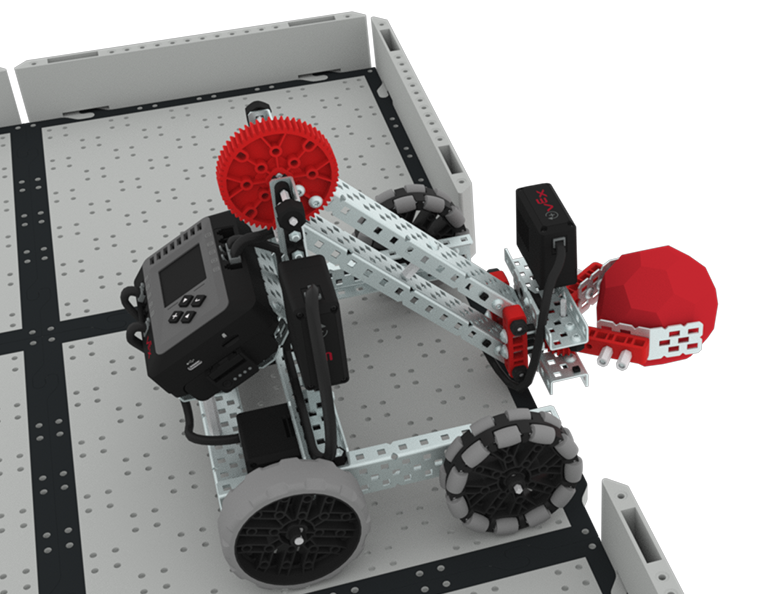
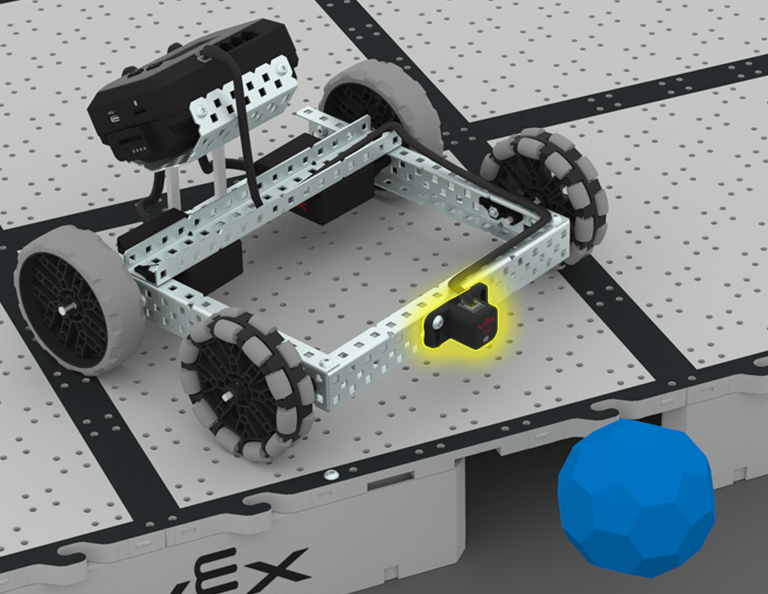
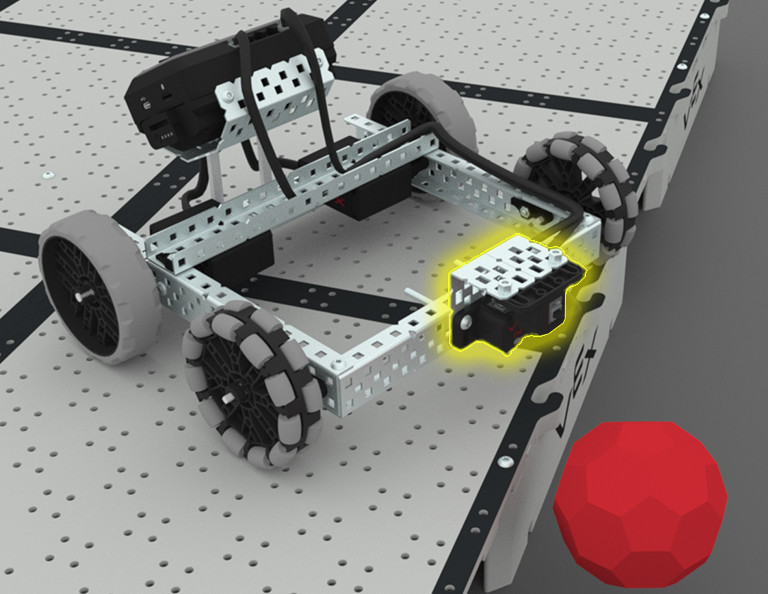
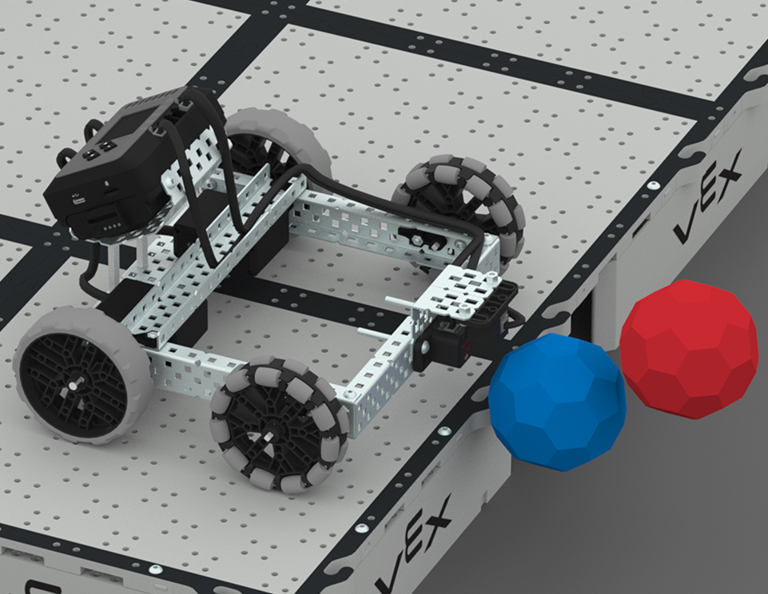
Caça ao Tesouro
5 Lições
Nesta Unidade, você construirá e codificará o Clawbot com o Sensor Óptico para reconhecer e coletar Buckyballs vermelhos para competir na competição Caça ao Tesouro!
Visite o Portal do Professor para obter materiais de apoio ao professor e vídeos sobre o conteúdo e a facilitação das Lições de Caça ao Tesouro.
Lição 1: Introdução
Você será apresentado à competição Caça ao Tesouro, construirá o Clawbot e se preparará para codificar.
Lição 2: Garra sem sensor
Nesta lição, você aprenderá sobre o uso de blocos Drivetrain e Motion no VEXcode EXP para codificar seu Clawbot para coletar e mover Buckyballs no Desafio do Coletor.
Lição 3: Garra com Sensor
Nesta Lição, você aprenderá a codificar o Sensor Óptico para detectar, coletar e mover uma Buckyball vermelha no desafio Movimentador de Tesouros!
Lição 4: Competição de Caça ao Tesouro
Nesta Lição, você aplicará o aprendizado das Lições anteriores para competir numa competição de Caça ao Tesouro!
Lição 5: Conclusão
Nesta Lição, irá refletir sobre a Unidade e identificar ligações entre o que fez e uma carreira STEM.
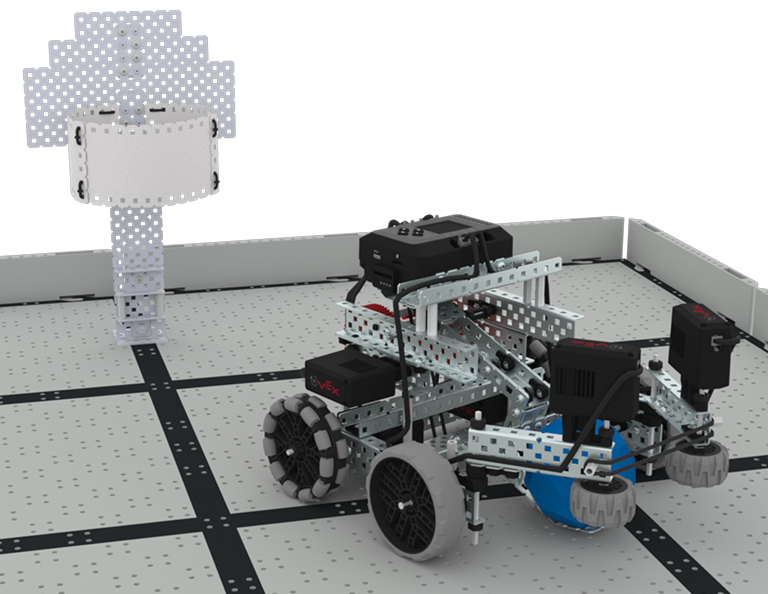
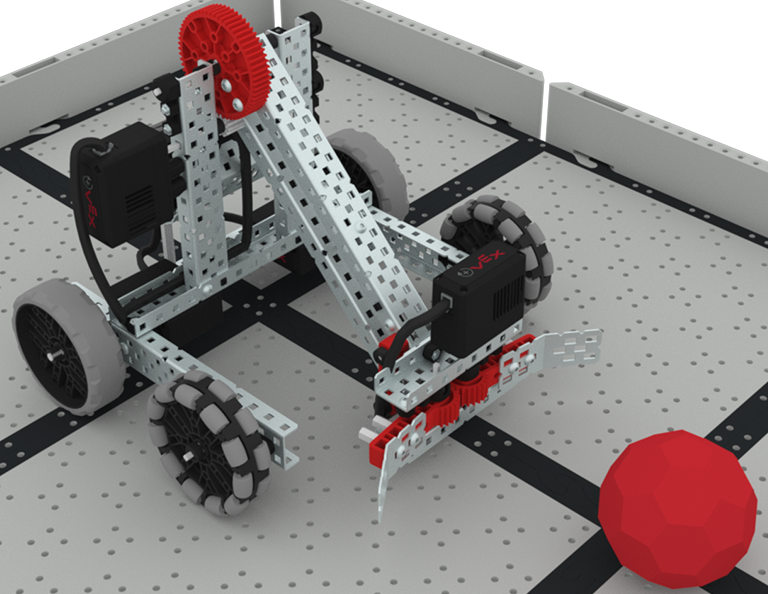
Destruidores de Castelos
6 Lições
Nesta unidade, irá explorar como utilizar os sensores óticos e de distância para procurar, colidir e limpar ‘castelos’ de Buckyball para marcar pontos na competição Castle Crasher!
Visite o Portal do Professor para materiais de apoio ao professor e vídeos sobre o conteúdo e facilitação das Lições do Castle Crasher.
Lição 1: Introdução
Nesta Lição, você será apresentado à Competição Castle Crasher, construirá o BaseBot e se preparará para programar.
Lição 2: Castle Crasher Sem Sensores
Nesta lição, você aprenderá a calcular ângulos e alterar a velocidade do seu robô para poder competir no Buckyball Blitz Challenge.
Lição 3: Castle Crasher + Sensor de Distância
Nesta lição, você aprenderá sobre o que é o sensor de distância e como ele pode ser usado no seu robô. Você também aprenderá sobre o bloco [Wait until] e como ele pode ser usado em um projeto VEXCODE EXP. Então você aplicará o que aprendeu para competir no Sense and Sweep Challenge!
Lição 4: Criando Algoritmos
Nesta lição, você aprenderá sobre o sensor óptico e sobre como criar um algoritmo que usa o feedback do sensor. Em seguida, você codificará seu robô para encontrar Buckyballs de forma autônoma e empurrá-los para fora do Campo no Desafio Varrer o Campo.
Lição 5: Competição Castle Crasher
Nesta Lição, você aplicará o seu aprendizado das Lições anteriores para competir numa competição Castle Crasher!

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.
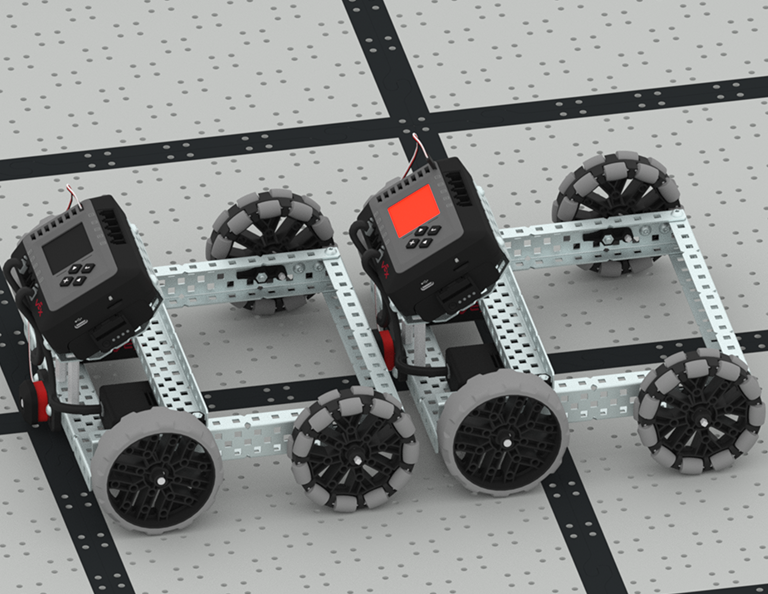
Etiqueta de congelamento da equipa
6 Lições
Nesta Unidade, você dirigirá seu robô usando o Controlador, escolherá rodas e adicionará um Interruptor de Para-choque para competir na competição Team Freeze Tag!
Visite o Portal do Professor para obter materiais de apoio ao professor e vídeos sobre o conteúdo e a facilitação das Lições do Team Freeze Tag.
Lição 1: Introdução
Nesta lição, você será apresentado à competição Team Freeze Tag, configurará a bateria e o controlador e criará o BaseBot.
Lesson 2: Driving with the EXP Controller
In this Lesson, you will learn how to drive the BaseBot using the EXP Controller and practice your driving to compete in a challenge activity as you drive in a figure eight!
Lição 3: Mudando as Rodas
Nesta lição, você aprenderá a trocar as rodas do BaseBot e experimentará diferentes combinações de rodas para melhorar a capacidade do robô de dirigir no Desafio Figura Oito Rodas.
Lição 4: Adicionando o Interruptor do Para-choques e Imprimindo na Tela do Cérebro
Nesta Lição, você adicionará um Interruptor de Para-choque ao seu BaseBot e aprenderá a imprimir na tela do Cérebro para competir na Tag de Congelamento 1 a 1!
Lição 5: Competição de Tag de Congelamento de Equipe
Nesta lição, você combinará todas as habilidades aprendidas nas lições anteriores para jogar um jogo de Team Freeze Tag!
Lição 6: Conclusão
Nesta Lição, irá refletir sobre a Unidade e identificar ligações entre o que fez e uma carreira STEM.
Para cima e para cima
6 Lições
Nesta unidade, irás explorar como desenhar um Clawbot para recolher, apanhar e mover Buckyballs de um lado para o outro do campo, na competição Up and Over!
Visite o Portal do Professor para obter materiais de apoio ao professor e vídeos sobre o conteúdo e a facilitação das aulas Up and Over.
Lição 1: Introdução
Nesta Lição, você será apresentado à competição Up and Over, configurará a Bateria e o Controlador, preparar-se-á para codificar e construirá o Clawbot.
Lição 2: Design de Garras
Nesta lição, você aprenderá o que é uma garra, como uma garra eficaz funciona e como o reconhecimento pode beneficiar os designs e a estratégia da sua equipe. Em seguida, você aplicará o que aprendeu no desafio Grab and Go.
Lição 3: Desenhos de Braços
Nesta lição, você aprenderá sobre diferentes elementos dos braços robóticos, incluindo como eles funcionam e o que torna um design de braço eficaz. Em seguida, você projetará e construirá um braço para o seu robô empilhar Buckyballs em anéis para o desafio Stacked Up.
Lição 4: Grupos Motores
Nesta lição, você aprenderá o que são grupos motores, como eles podem ser úteis e como configurar grupos motores no VEXcode EXP para iterar no seu robô para concluir o desafio Up and Over.
Lição 5: Acima e acima da concorrência
Nesta lição, você aplicará seu aprendizado das lições anteriores para competir na competição Up and Over!
Lição 6: Conclusão
Nesta Lição, irá refletir sobre a Unidade e identificar ligações entre o que fez e uma carreira STEM.