
ตัวควบคุมและลูป
ในการแข่งขันทีมจะต้องจัดการหุ่นยนต์ของพวกเขาแบบไร้สายด้วยตัวควบคุม
ตัวควบคุมถูกตั้งโปรแกรมให้อัปเดตหุ่นยนต์ตามอินพุตจากผู้ใช้
ลูปถูกใช้ในโครงการเพื่อให้หุ่นยนต์ตรวจสอบข้อมูลอินพุตที่อัปเดตซ้ำๆ
ลูปช่วยให้โครงการสามารถตรวจสอบได้อย่างรวดเร็วว่ามีการกดปุ่มใดหรือกดจอยสติ๊กไกลแค่ไหน
เมื่อตรวจสอบแล้วข้อมูลนี้จะถูกส่งต่อไปยังหุ่นยนต์อย่างรวดเร็วเพื่อให้ตอบสนองต่อคำสั่งของตัวควบคุมได้อย่างรวดเร็ว
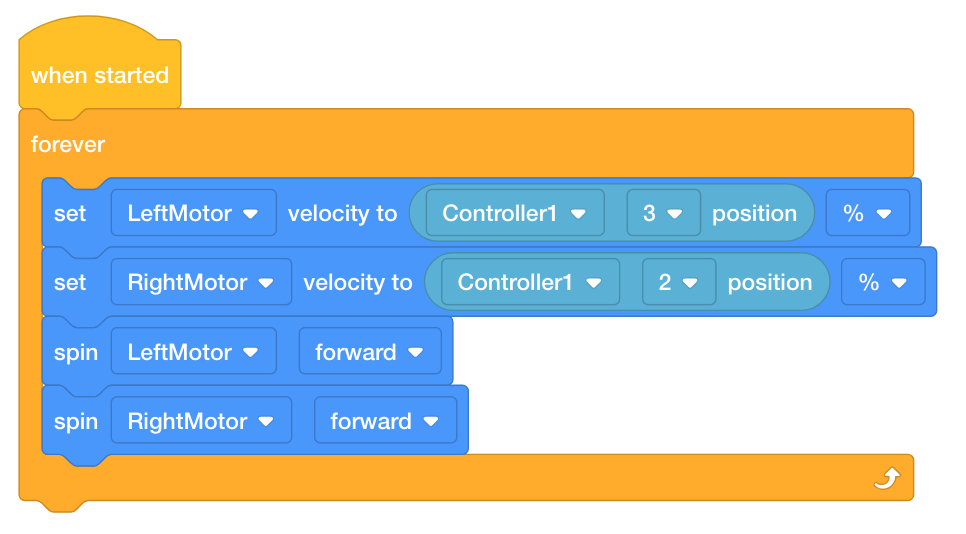
ภาพต่อไปนี้แสดงโครงการตัวอย่าง
Tank Drive จาก VEXcode V5 ห่วง ตลอดไปในโครงการนี้จะตรวจสอบตำแหน่งของแกน 2 และ 3
ตลอดไปเพื่อตั้งค่าความเร็วของมอเตอร์
 โครงการตัวอย่าง
โครงการตัวอย่าง ลูปมีความสำคัญแม้สำหรับการเขียนโปรแกรมอัตโนมัติโดยไม่มีตัวควบคุม ลูปช่วยลดความซับซ้อนและจัดระเบียบคำสั่งซ้ำๆภายในโครงการ
![]() ขยายการเรียนรู้ของท่าน
ขยายการเรียนรู้ของท่าน
หากต้องการขยายกิจกรรมนี้ขอให้นักเรียนสำรวจความแตกต่างระหว่างการควบคุมอาร์เคดและการควบคุมรถถัง นักเรียนสามารถทำตามโครงการตัวอย่างที่พบใน VEXcode V5 มีสี่โครงการตัวอย่าง: อาร์เคดซ้ายอาร์เคดขวาอาร์เคดแยกและไดรฟ์รถถัง


อภิปรายว่าลูปภายในโปรแกรมทำงานอย่างไรรวมถึงข้อดีและข้อเสียของการควบคุมแต่ละประเภท
หากต้องการเชื่อมโยงกิจกรรมนี้กับคณิตศาสตร์ให้ใช้โครงการอาร์เคดซ้าย/ขวา (หนึ่งจอยสติ๊ก) และโครงการอาร์เคด/รถถังแยก (ทั้งสองจอยสติ๊ก) ด้านบนเพื่อหารือเกี่ยวกับบทบาทของแกน X และ Y ภายในโครงการ
เลือก "ถัดไป" เพื่อดำเนินการต่อ!