What is a Vision Sensor? - Blocks-based
Description
The Vision Sensor allows your robot to collect visual data from a live feed. A live feed is a streaming transmission of what a video camera is capturing. The Vision Sensor is like a smart camera that can observe, select, adjust, and store colors and objects that appear in its visual field.

Capabilities:
- This sensor can be used for recognizing colors and color patterns.
- This sensor can be used to follow an object.
- This sensor can be used to collect information about the environment.
The Vision Sensor allows the robot to use visual input data from its environment. The project can then determine how the visual input data should affect the robot's behavior. For example, the robot could perform actions (output) such as spinning motors or displaying results on the LCD screen.
The Vision Sensor can also capture a snapshot of what is in front of it and analyze it according to what the user is asking. For example, a user can gather data from the snapshot such as, what color is the object? Is there an object detected at all? How large is the object (width and height)?
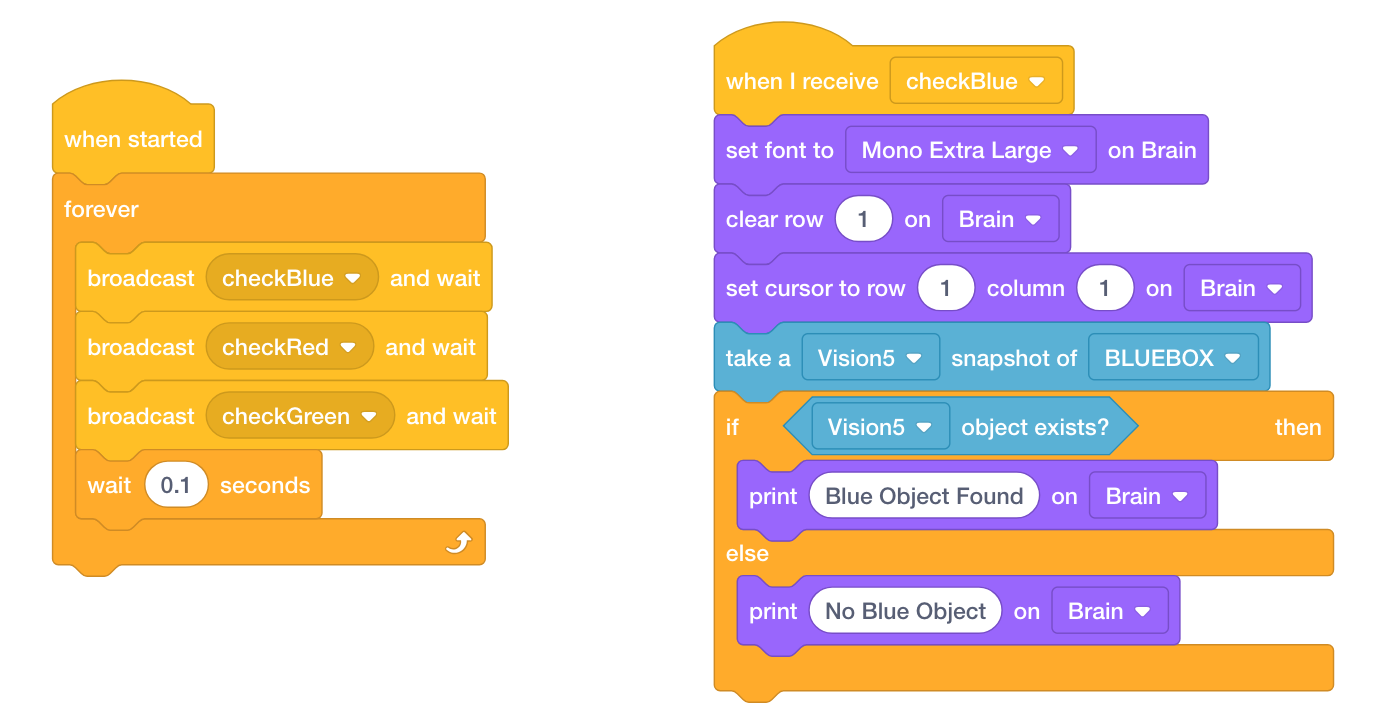
The robot can then make decisions based off of this data. The partial example project below shows how this is done. Three colors are being checked repeatedly after the project is started, and each color check is a different event. Only the event that checks for Blue is shown below. This stack has the robot print "Blue Object Found" if a blue object is detected or "No Blue Object" otherwise. The checkRed and checkGreen events not shown below have similar stacks for deciding what to print on the screen.