
Cos'è un sensore visivo? - Basato su blocchi
![]() Toolbox per l'insegnante
-
Lo scopo di questa pagina
Toolbox per l'insegnante
-
Lo scopo di questa pagina
Questa pagina introdurrà gli studenti a cos'è un sensore visivo e ad alcune delle sue capacità. Gli studenti analizzeranno quindi un'immagine parziale di un progetto di esempio per vedere come il sensore di visione può essere utilizzato con VEXcode V5.
Le domande di discussione motivazionale in fondo alla pagina possono essere completate come discussione in classe o individualmente nei quaderni di ingegneria degli studenti.
Descrizione
Il sensore visivo consente al robot di raccogliere dati visivi da un feed live. Un feed live è una trasmissione in streaming di ciò che una videocamera sta riprendendo. Il sensore visivo è come una telecamera intelligente in grado di osservare, selezionare, regolare e memorizzare i colori e gli oggetti che appaiono nel suo campo visivo.

Capacità:
- Questo sensore può essere utilizzato per riconoscere colori e schemi cromatici.
- Questo sensore può essere utilizzato per seguire un oggetto.
- Questo sensore può essere utilizzato per raccogliere informazioni sull'ambiente.
Il sensore visivo consente al robot di utilizzare dati di input visivi provenienti dall'ambiente circostante. Il progetto può quindi determinare in che modo i dati di input visivi dovrebbero influenzare il comportamento del robot. Ad esempio, il robot potrebbe eseguire azioni (output) come far girare motori o visualizzare risultati sullo schermo LCD.
Il sensore di visione può anche catturare un'istantanea di ciò che si trova di fronte a lui e analizzarla in base alle richieste dell'utente. Ad esempio, un utente può raccogliere dati dall'istantanea, ad esempio: di che colore è l'oggetto? È stato rilevato un oggetto? Quanto è grande l'oggetto (larghezza e altezza)?
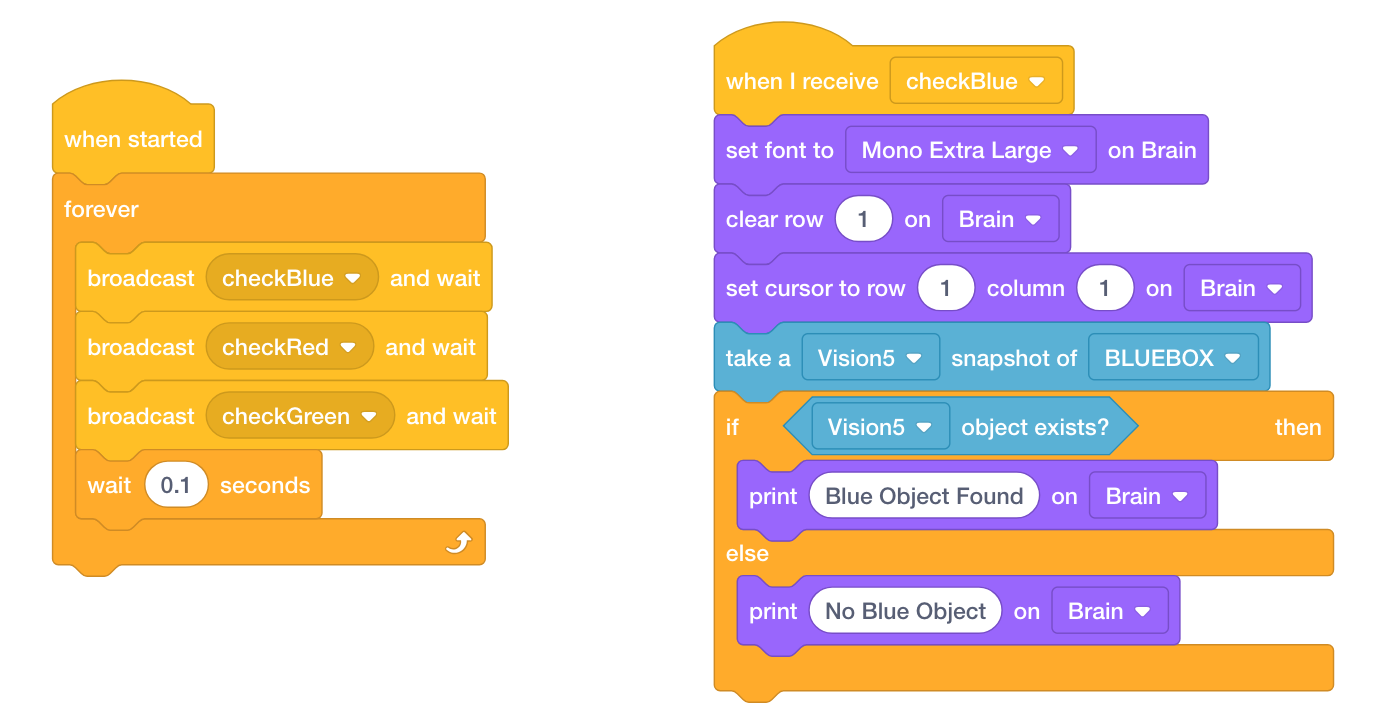
Il robot può quindi prendere decisioni sulla base di questi dati. Il progetto di esempio parziale riportato di seguito mostra come fare. Dopo l'avvio del progetto, vengono controllati ripetutamente tre colori e ogni controllo colore rappresenta un evento diverso. Di seguito viene mostrato solo l'evento che verifica la presenza di Blue. Questa pila fa sì che il robot stampi "Oggetto blu trovato" se viene rilevato un oggetto blu, altrimenti "Nessun oggetto blu". Gli eventi checkRed e checkGreen non mostrati di seguito hanno stack simili per decidere cosa stampare sullo schermo.
![]() Motivare la discussione
Motivare la discussione
D: Quali tipi di lavori umani trarrebbero vantaggio dall'aiuto di un robot dotato di sensore visivo?
R: Ascolta i lavori umani che trarrebbero vantaggio dalla capacità di vedere nell'ambiente e/o manipolare i dintorni da distanze remote (ad esempio, osservare gli animali allo stato brado, disinnescare esplosivi o eseguire interventi chirurgici assistiti da robot).
D: Indica un dispositivo e descrivi come utilizza input, output ed elaborazione.
A: Una possibile risposta potrebbe essere una calcolatrice che prende le sequenze di numeri e operatori matematici immessi da una persona, elabora tali numeri e operazioni per calcolare un risultato e quindi visualizza tale risultato su uno schermo per la persona.
D: Perché pensi che nel progetto mostrato sopra sia stato utilizzato un ciclo per sempre ?
R: È stato utilizzato un ciclo per sempre in modo che il sensore di visione controlli continuamente le molteplici istantanee acquisite per vedere se un oggetto rosso entra nel campo visivo del sensore.