
¿Qué es un sensor de visión? - Basado en bloques
![]() Caja de herramientas para maestros
: el propósito de esta página
Caja de herramientas para maestros
: el propósito de esta página
Esta página presentará a los estudiantes qué es un sensor de visión y algunas de sus capacidades. Luego, los estudiantes analizarán una imagen parcial de un proyecto de ejemplo para ver cómo se puede usar el sensor de visión con VEXcode V5.
Las preguntas de Motivate Discussion en la parte inferior de la página se pueden completar como una discusión en clase o individualmente en los cuadernos de ingeniería de los estudiantes.
Descripción
El sensor de visión permite que su robot recopile datos visuales de una transmisión en vivo. Una transmisión en vivo es una transmisión en streaming de lo que está capturando una cámara de vídeo. El sensor de visión es como una cámara inteligente que puede observar, seleccionar, ajustar y almacenar colores y objetos que aparecen en su campo visual.
 Sensor de
Sensor de Capacidades:
- Este sensor se puede utilizar para reconocer colores y patrones de color.
- Este sensor se puede utilizar para seguir un objeto.
- Este sensor se puede utilizar para recopilar información sobre el medio ambiente.
El sensor de visión permite al robot utilizar datos de entrada visual de su entorno. El proyecto puede determinar cómo los datos de entrada visual deberían afectar el comportamiento del robot. Por ejemplo, el robot podría realizar acciones (salida) como girar motores o mostrar resultados en la pantalla LCD.
El sensor de visión también puede capturar una instantánea de lo que está frente a él y analizarlo de acuerdo con lo que el usuario está pidiendo. Por ejemplo, un usuario puede recopilar datos de la instantánea como, por ejemplo, ¿de qué color es el objeto? ¿Se ha detectado algún objeto? ¿Qué tan grande es el objeto (ancho y alto)?
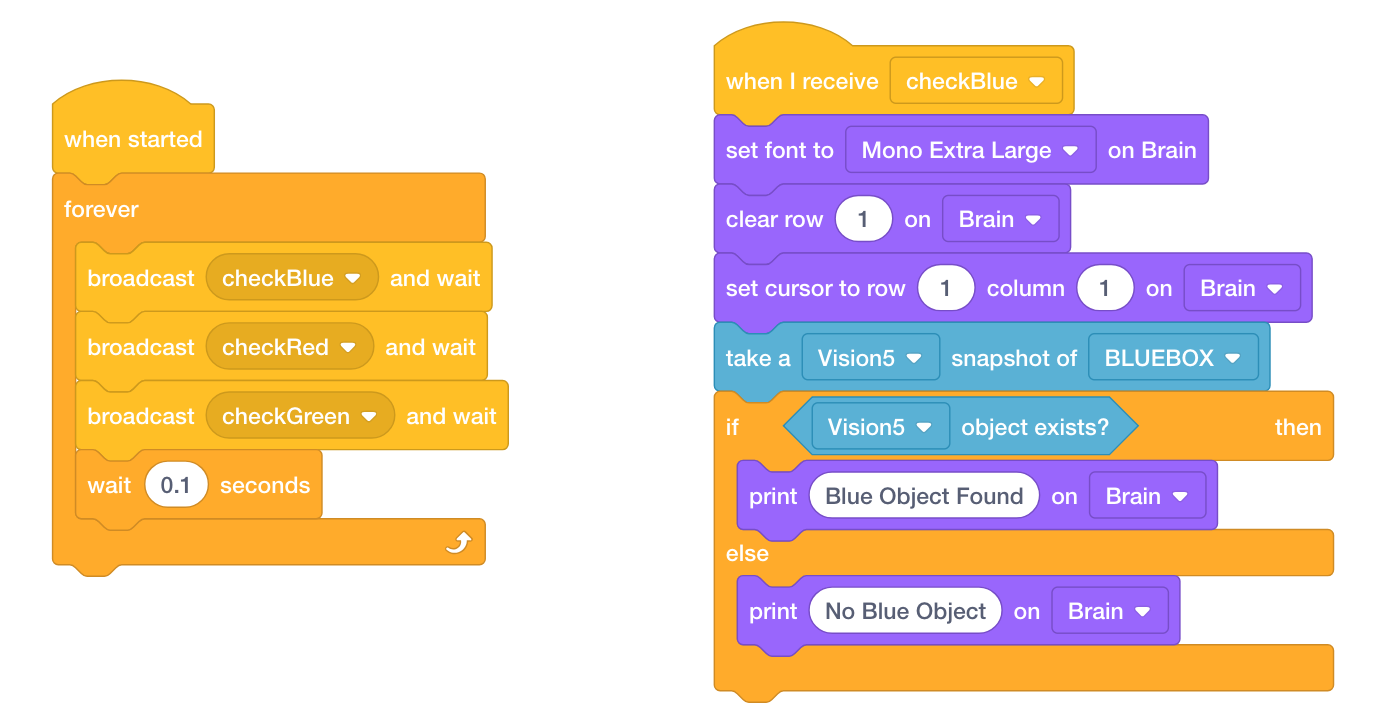
El robot puede entonces tomar decisiones basadas en estos datos. El siguiente proyecto de ejemplo parcial muestra cómo se hace esto. Se comprueban tres colores repetidamente después de iniciar el proyecto, y cada verificación de color es un evento diferente. A continuación, solo se muestra el evento que marca el color azul. Esta pila tiene la impresión del robot "Objeto azul encontrado" si se detecta un objeto azul o "No hay objeto azul" de lo contrario. Los eventos checkRed y checkGreen que no se muestran a continuación tienen pilas similares para decidir qué imprimir en la pantalla.
![]() Motivar la discusión
Motivar la discusión
P: ¿Qué tipos de trabajos humanos se beneficiarían de contar con la ayuda de un robot con un sensor de visión?
R: Escuche los trabajos humanos que se beneficiarían de la capacidad de ver en entornos y/o manipular los alrededores desde distancias remotas (por ejemplo, observar animales en la naturaleza, desarmar explosivos o realizar cirugía asistida por robot).
P: Nombra un dispositivo y describe cómo utiliza la entrada, la salida y el proceso.
R: Una posible respuesta podría ser una calculadora que toma las secuencias de números y operadores matemáticos que una persona ingresa, procesa esos números y operaciones para calcular un resultado y luego genera ese resultado en una pantalla para la persona.
P: ¿Por qué cree que se utilizó un bucle Forever en el proyecto que se muestra arriba?
R: Se utilizó un bucle Forever para que el sensor de visión compruebe continuamente las múltiples instantáneas tomadas para ver si un objeto rojo aparece a la vista del sensor.