
الآن بعد أن استكشفت كيف يمكن لتغيير معلمات الزاوية أن يحسن مشاريع الترميز الخاصة بك، ستستفيد من هذه المعرفة عن طريق برمجة الروبوت الخاص بك للتنقل حول مجموعة من البراميل بأسرع ما يمكن. ستركز على ضبط الزوايا لتحسين دقة وسرعة حركة الروبوت الخاص بك.
شاهد الفيديو أدناه لمعرفة المزيد عن:
- استخدام تعديلات زاوية صغيرة لتحقيق الدقة.
- ضبط الزوايا للتنقل حول العوائق الموضوعة على مسافات مختلفة من الروبوت.
الآن بعد أن شاهدت الفيديو، قم بتدوين أفكارك في يومياتك. أجب عن هذه الأسئلة لتوجيه تفكيرك ومساعدتك في الاستعداد لمناقشة الفصل بأكمله:
- قم بإدراج سؤالين على الأقل لديك حول كيفية اختلاف معلمات الزاوية والمسافة بناءً على مدى بعد الأشياء عن الروبوت.
- كيف يمكنك استخدام تعديلات الزاوية الصغيرة للحصول على الدقة؟
- ما الذي لاحظته في الفيديو والذي يدعم تفكيرك؟
- ما هو الشيء الذي تعلمته عن البرمجة أو VEXcode والذي سيساعدك في هذا الدرس؟
الآن بعد أن شاهدت الفيديو، قم بتدوين أفكارك في يومياتك. أجب عن هذه الأسئلة لتوجيه تفكيرك ومساعدتك في الاستعداد لمناقشة الفصل بأكمله:
- قم بإدراج سؤالين على الأقل لديك حول كيفية اختلاف معلمات الزاوية والمسافة بناءً على مدى بعد الأشياء عن الروبوت.
- كيف يمكنك استخدام تعديلات الزاوية الصغيرة للحصول على الدقة؟
- ما الذي لاحظته في الفيديو والذي يدعم تفكيرك؟
- ما هو الشيء الذي تعلمته عن البرمجة أو VEXcode والذي سيساعدك في هذا الدرس؟
بعد أن يشاهد الطلاب الفيديو وقبل التدريب، لمناقشة الفصل بأكمله. استخدم إجابات الطلاب على الأسئلة المقدمة كأساس للمناقشة.
قم بتدوين مساهمات الطلاب على السبورة حتى يتمكن الجميع من رؤية أفكار بعضهم البعض والبناء عليها. ذكّرهم بالرجوع إلى مذكراتهم أو الصور المرئية من الفيديو لمساعدتهم على التعبير عن أفكارهم بوضوح.
الممارسة الموجهة
الآن بعد أن شاهدت الفيديو وناقشته، حان دورك للتمرين!
1: قم بإعداد الحقل كما هو موضح أدناه.
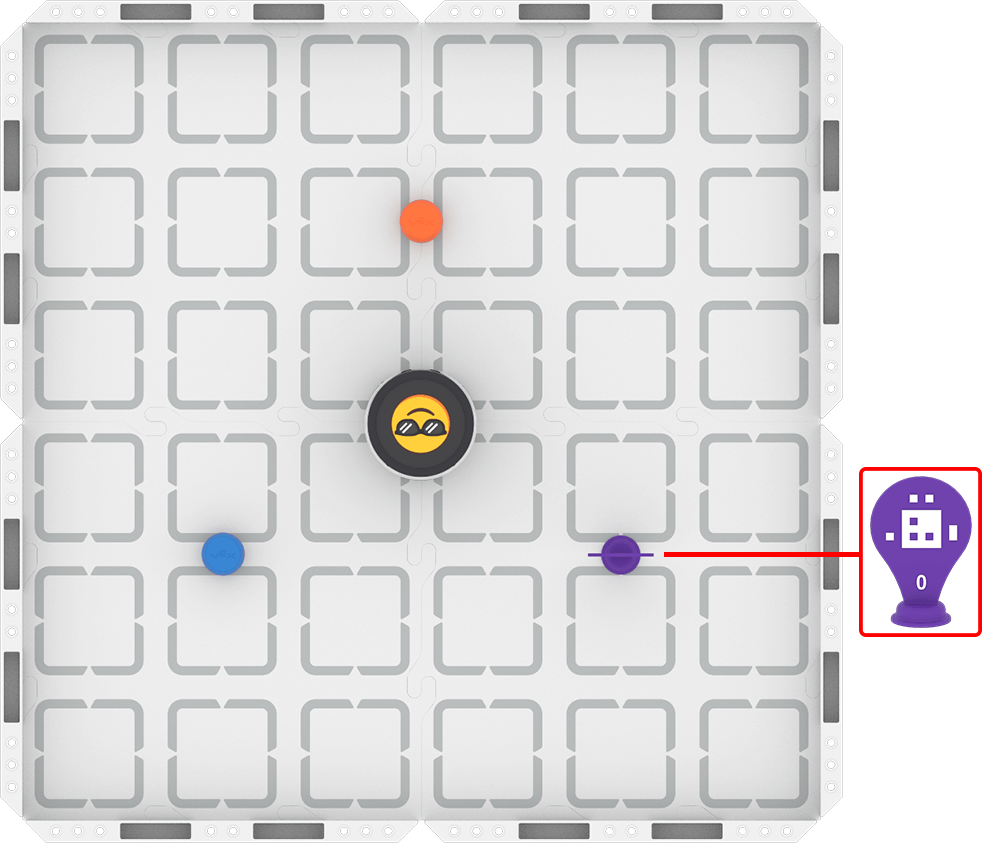
الخطوة : قم بإنشاء نموذج لحركات الروبوت اللازمة لإكمال المهمة باستخدام وضع القيادة.
- مهمتك هي قيادة الروبوت حول العوائق الثلاثة بأسرع ما يمكن. وثّق قيادتك، ثم خطط لكيفية برمجة تلك الحركة.
- استخدم بطاقة المهمة هذه (Google / .docx / .pdf) لتوجيه ممارستك.
- نصيحة احترافية: ضع في اعتبارك التفاصيل التي استخدمتها في الدرس السابق لبناء مشروع الترميز الخاص بك. انتبه إلى كل زاوية ومسافة مع تجنب العوائق، وقم بتوثيق قيادتك بالتفصيل لإنشاء خطة المسار الخاصة بك.
3: قم ببرمجة الروبوت لإكمال المهمة.
- استخدم المسار المخطط له من الخطوة 2 لبرمجة الروبوت للتحرك حول العوائق الثلاثة بأسرع ما يمكن.
- استخدم بطاقة المهمة هذه (Google / .docx / .pdf) لتوجيه ممارستك.
4: استخدم عملية والقيادة والقياس والترميز لتحسين سرعة الروبوت الخاص بك أثناء تحركه حول البرميلين:
- يتنبأ
- اختر زاوية واحدة لإجراء تعديل صغير عليها لتحسين سرعة الروبوت الخاص بك. قم بعمل تنبؤ جماعي حول كيفية تحسين الزاوية باستخدام جذع الجملة هذا، وسجله في يومياتك:
- نعتقد أن الزاوية يجب أن تكون حوالي ____________ درجة.
- اختر زاوية واحدة لإجراء تعديل صغير عليها لتحسين سرعة الروبوت الخاص بك. قم بعمل تنبؤ جماعي حول كيفية تحسين الزاوية باستخدام جذع الجملة هذا، وسجله في يومياتك:
- محرك
- اختبر توقعاتك عن طريق قيادة الروبوت الخاص بك بالزاوية التي توقعتها. إذا كان الأمر يبدو غريبًا، فما الذي تعتقد أنك بحاجة إلى تغييره لجعله أكثر دقة؟ إذا لم يكن الأمر كذلك، فما هو الشيء الصحيح فيه؟
- يقيس
- ضع روبوت المنقلة الخاص بك أسفل الروبوت. في أي زاوية قمت بقيادة الروبوت فعليًا؟
- شفرة
- استخدم زاويتك الجديدة في مشروع الترميز الخاص بك! قم بتعديل مشروعك، ثم قم بتشغيله للاختبار. هل دقة الزاوية الجديدة تعمل على تحسين سرعة الروبوت الخاص بك؟ إذا لم يكن الأمر كذلك، فاستخدم المنقلة الروبوتية لمساعدتك في تغيير الزاوية ثم حاول مرة أخرى. تأكد من تسجيل قياسات الزاوية وملاحظاتك في مجلتك أثناء قيامك بذلك.
الموارد للممارسة:
المقالات المرتبطة هنا متاحة إذا كنت بحاجة إلى دعم إضافي أثناء إكمال النشاط.
الآن بعد أن شاهدت الفيديو وناقشته، حان دورك للتمرين!
1: قم بإعداد الحقل كما هو موضح أدناه.
الخطوة : قم بإنشاء نموذج لحركات الروبوت اللازمة لإكمال المهمة باستخدام وضع القيادة.
- مهمتك هي قيادة الروبوت حول العوائق الثلاثة بأسرع ما يمكن. وثّق قيادتك، ثم خطط لكيفية برمجة تلك الحركة.
- استخدم بطاقة المهمة هذه (Google / .docx / .pdf) لتوجيه ممارستك.
- نصيحة احترافية: ضع في اعتبارك التفاصيل التي استخدمتها في الدرس السابق لبناء مشروع الترميز الخاص بك. انتبه إلى كل زاوية ومسافة مع تجنب العوائق، وقم بتوثيق قيادتك بالتفصيل لإنشاء خطة المسار الخاصة بك.
3: قم ببرمجة الروبوت لإكمال المهمة.
- استخدم المسار المخطط له من الخطوة 2 لبرمجة الروبوت للتحرك حول العوائق الثلاثة بأسرع ما يمكن.
- استخدم بطاقة المهمة هذه (Google / .docx / .pdf) لتوجيه ممارستك.
4: استخدم عملية والقيادة والقياس والترميز لتحسين سرعة الروبوت الخاص بك أثناء تحركه حول البرميلين:
- يتنبأ
- اختر زاوية واحدة لإجراء تعديل صغير عليها لتحسين سرعة الروبوت الخاص بك. قم بعمل تنبؤ جماعي حول كيفية تحسين الزاوية باستخدام جذع الجملة هذا، وسجله في يومياتك:
- نعتقد أن الزاوية يجب أن تكون حوالي ____________ درجة.
- اختر زاوية واحدة لإجراء تعديل صغير عليها لتحسين سرعة الروبوت الخاص بك. قم بعمل تنبؤ جماعي حول كيفية تحسين الزاوية باستخدام جذع الجملة هذا، وسجله في يومياتك:
- محرك
- اختبر توقعاتك عن طريق قيادة الروبوت الخاص بك بالزاوية التي توقعتها. إذا كان الأمر يبدو غريبًا، فما الذي تعتقد أنك بحاجة إلى تغييره لجعله أكثر دقة؟ إذا لم يكن الأمر كذلك، فما هو الشيء الصحيح فيه؟
- يقيس
- ضع روبوت المنقلة الخاص بك أسفل الروبوت. في أي زاوية قمت بقيادة الروبوت فعليًا؟
- شفرة
- استخدم زاويتك الجديدة في مشروع الترميز الخاص بك! قم بتعديل مشروعك، ثم قم بتشغيله للاختبار. هل دقة الزاوية الجديدة تعمل على تحسين سرعة الروبوت الخاص بك؟ إذا لم يكن الأمر كذلك، فاستخدم المنقلة الروبوتية لمساعدتك في تغيير الزاوية ثم حاول مرة أخرى. تأكد من تسجيل قياسات الزاوية وملاحظاتك في مجلتك أثناء قيامك بذلك.
الموارد للممارسة:
المقالات المرتبطة هنا متاحة إذا كنت بحاجة إلى دعم إضافي أثناء إكمال النشاط.
توقعات العمل الجماعي في المقدمة في البداية. لمعرفة المزيد عن أدوار التعاون في الترميز، اطلع على هذه المقالة حول البرمجة الزوجية. اطرح أسئلة مثل:
- كيف ستبدأ مجموعتك هذا النشاط؟
- كيف ستتأكد من أن الجميع يساهمون في القيادة والبرمجة؟
قم بتوزيع بطاقة مهمة الخطوة 2 على كل طالب (Google / .docx / .pdf). تذكر أن هدف قيادة الروبوت لإكمال المهمة هو أن يقوم الطلاب بتطوير نموذج مادي للمهمة، والذي سوف يقومون من خلاله ببناء نموذج حسابي عندما يبدأون في البرمجة. تأكد من أن جميع الطلاب يأخذون الوقت اللازم للقيادة والتوثيق والتخطيط للمسار أثناء الجزء القيادي من التدريب الموجه. إن إرساء عادات جيدة من خلال مهام بسيطة سوف يساعدك لاحقًا عندما تصبح المهام أكثر تعقيدًا.
عندما يكمل الطلاب تدريبهم على القيادة، بالتجول في الغرفة والاطمئنان على الطلاب بشأن ما تعلموه. اطرح أسئلة مثل:
- ما هو الشيء الذي تنتبه إليه أثناء القيادة والذي تعتقد أنه سيساعدك في البرمجة؟ لماذا هذا مهم بالنسبة لك؟
- هل قام الجميع بالقيادة والتوثيق بنفس الطريقة؟ ما هو المتشابه أو المختلف؟ كيف يمكنك دمج أفكارك في خطة مشتركة؟
قم بتوزيع بطاقة مهمة الخطوة 3 على كل طالب بعد استيفائه لمعايير النجاح في القيادة، ومشاركة خطة المسار الخاصة به معك (Google / .docx / .pdf). ثم سيستخدم الطلاب خططهم كأساس لبناء مشاريع VEXcode الخاصة بهم. شجع الطلاب على إضافة المزيد إلى وثائق القيادة الخاصة بهم أثناء بناء مشاريعهم واختبارها، لمساعدتهم على تحديد الاستراتيجيات والتفاصيل الأكثر فائدة. ويمكنهم أيضًا استخدام زر التراجع والإعادة لمساعدتهم. ذكّر الطلاب بأنه يمكنهم العودة إلى القيادة في أي وقت لمساعدتهم في برمجة مشروعهم بنجاح.
يتم تشجيع الطلاب على استخدام المنقلة الروبوتية المطبوعة أثناء التخطيط لمسارهم. إذا لم يكن لدى الطلاب إمكانية الوصول إلى الطابعة، قم بطباعة هذا لهم.
بينما يقوم الطلاب ببرمجة الروبوت، في الغرفة ويشاركون الطلاب في المناقشات لمعرفة المزيد عن تقدمهم في البرمجة وفهمهم لها. اطرح أسئلة مثل:
- كيف تستخدم ما تعلمته في الدرس لاختيار قياسات الزاوية الخاصة بك؟
- كيف تعتقد أن الدقة والسرعة التي يتحرك بها الروبوت مرتبطة؟
- كيف تعاونت مجموعتك لإكمال هذه المهمة معًا؟
تم تصميم 4 لتعزيز تكرار الطلاب واستكشافهم من خلال التنقل بين القيادة والترميز لتحسين مشاريعهم والعثور على أفضل استراتيجية للمهمة. يجب الطلاب استخدام عملية التنبؤ والقيادة والقياس والترميز لمساعدتهم على تحسين شيء واحد حول حركة الروبوت الخاص بهم في كل مرة، مع التركيز على تعديلات الزاوية الصغيرة للدقة، مما سيؤدي تحسين سرعتهم الإجمالية. ينبغي عليهم تكرار العملية بشكل متكرر لتحسين مشروعهم. لتسهيل هذه العملية، اطرح أسئلة مثل:
- هل تطابقت نتائج اختبارك مع توقعاتك؟ ما هي التعديلات التي تحتاج إلى إجرائها؟
- كيف يساعدك التنبؤ بالزاوية قبل القيادة على تحسين دقة حركات الروبوت الخاص بك؟
- هل تحسين دقة الزوايا يساعد الروبوت الخاص بك على التحرك حول البراميل الثلاثة بشكل أسرع؟ كيف علمت بذلك؟
- ما الذي وثقته في يومياتك طوال هذه العملية؟ كيف يمكنك تحسين عملية التوثيق الخاصة بك؟
الخلاصة
الآن بعد أن قمت بالتدريب، حان الوقت لمشاركة ما تعلمته. أجب عن الأسئلة التالية في يومياتك لمساعدتك على التفكير في تعليمك والاستعداد لمناقشة الفصل بأكمله:
- ما هو الشيء الذي تعلمته أثناء القيادة والذي ساعدك في البرمجة؟ كيف وثقت هذا التعلم؟
- ما هو الشيء الذي تعلمته حول تحسين وقتك لإكمال المهمة؟
- كيف تعاونت مع مجموعتك لتحديد أفضل قياسات الزاوية والمسافة؟
الآن بعد أن قمت بالتدريب، حان الوقت لمشاركة ما تعلمته. أجب عن الأسئلة التالية في يومياتك لمساعدتك على التفكير في تعليمك والاستعداد لمناقشة الفصل بأكمله:
- ما هو الشيء الذي تعلمته أثناء القيادة والذي ساعدك في البرمجة؟ كيف وثقت هذا التعلم؟
- ما هو الشيء الذي تعلمته حول تحسين وقتك لإكمال المهمة؟
- كيف تعاونت مع مجموعتك لتحديد أفضل قياسات الزاوية والمسافة؟
توجيه الطلاب لمشاركة ما تعلموه في مناقشة مع الفصل بأكمله. الأسئلة التي يجيب عليها الطلاب في مذكراتهم هي نقطة البداية للمناقشة. اطرح أسئلة متابعة لتوجيه الطلاب إلى توحيد تفكيرهم حول الفهم المشترك. متابعة مع أسئلة مثل:
- إذا طلب منك شخص ما أن تشرح استراتيجيتك لإكمال التحدي المحدد بالوقت، ماذا ستقول؟
- كيف وجدت زواياك ومسافاتك؟ ما هي بعض الطرق المختلفة؟ كيف تعتقد أن هذا الدرس قد يساعدك على المضي قدمًا؟
- ما الذي تعرفه الآن عن برمجة الروبوت الخاص بك والذي لم تكن تعرفه قبل التدريب؟ ما هو الدليل الذي لديك لدعم ذلك؟
أضف إلى القائمة المشتركة لممارسات ترميز VEXcode من الدرس 2، بناءً على ما يشاركه الطلاب. يجب أن تعكس هذه القطع الأثرية فهم الفصل الحالي لبرمجة الروبوتات الخاصة بهم.
حدد التالي > للانتقال إلى تحدي الوحدة.