
Artık açı parametrelerini değiştirmenin kodlama projelerinizi nasıl iyileştirebileceğini keşfettiğinize göre, robotunuzu bir dizi varilin etrafında mümkün olduğunca hızlı bir şekilde hareket edecek şekilde kodlayarak bu bilgiyi geliştireceksiniz. Robotunuzun hareketinin hem hassasiyetini hem de hızını artırmak için açıları ayarlamaya odaklanacaksınız.
Aşağıdaki videoyu izleyerek şunları öğrenebilirsiniz:
- Hassasiyet için küçük açı ayarlamaları kullanılır.
- Robottan farklı mesafelere yerleştirilen engellerin etrafından dolaşmak için açıların ayarlanması.
Videoyu izledikten sonra düşüncelerinizi günlüğünüze yazabilirsiniz. Düşüncenizi yönlendirmek ve tüm sınıf tartışmasına hazırlanmanıza yardımcı olmak için şu soruları yanıtlayın:
- Robotun nesnelere olan uzaklığına bağlı olarak açı ve mesafe parametrelerinin nasıl değiştiğine dair en az iki sorunuzu listeleyin.
- Hassasiyet için küçük açılı ayarlamaları nasıl kullanırsınız?
- Videoda düşüncenizi destekleyen ne gözlemlediniz?
- Bu derste size yardımcı olacak kodlama veya VEXcode hakkında öğrendiğiniz bir şey var mı?
Videoyu izledikten sonra düşüncelerinizi günlüğünüze yazabilirsiniz. Düşüncenizi yönlendirmek ve tüm sınıf tartışmasına hazırlanmanıza yardımcı olmak için şu soruları yanıtlayın:
- Robotun nesnelere olan uzaklığına bağlı olarak açı ve mesafe parametrelerinin nasıl değiştiğine dair en az iki sorunuzu listeleyin.
- Hassasiyet için küçük açılı ayarlamaları nasıl kullanırsınız?
- Videoda düşüncenizi destekleyen ne gözlemlediniz?
- Bu derste size yardımcı olacak kodlama veya VEXcode hakkında öğrendiğiniz bir şey var mı?
Öğrenciler videoyu izledikten ve uygulamaya başlamadan önce tüm sınıfın katılacağı bir tartışma için bir araya gelir Öğrencilerin verilen sorulara verdikleri cevapları tartışmanın temeli olarak kullanın.
Öğrencilerin katkılarını tahtaya yazın, böylece herkes birbirinin fikirlerini görüp geliştirebilsin. Fikirlerini net bir şekilde ifade etmelerine yardımcı olmak için videodaki günlüklerine veya görsellere başvurmalarını hatırlatın
Rehberli Uygulama
Videoyu izleyip tartıştığınıza göre şimdi sıra sizde!
Adım 1: Alanı aşağıda gösterildiği gibi ayarlayın.
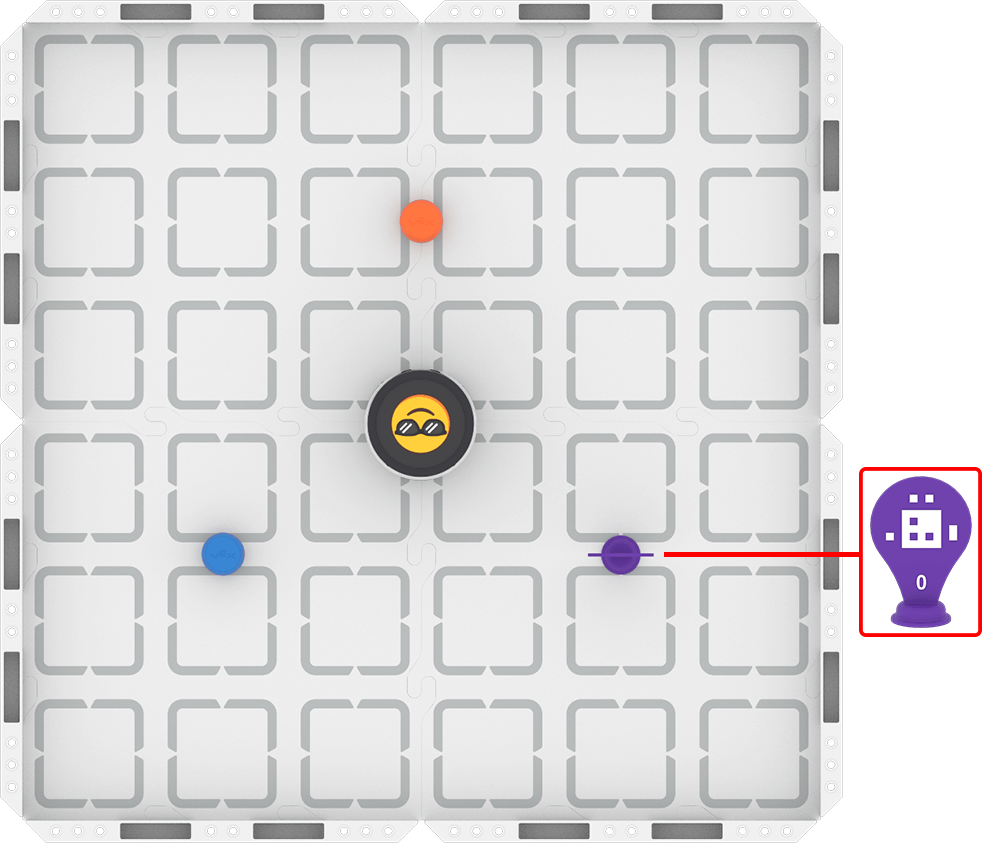
Adım 2: Sürüş modunu kullanarak robotun görevi tamamlaması için gereken hareketlerini modelleyin.
- Göreviniz robotu üç engelin etrafından olabildiğince hızlı bir şekilde geçirmektir. Sürüşünüzü belgelendirin, ardından bu hareketi nasıl kodlayacağınızı planlayın.
- Uygulamanızı yönlendirmek için bu görev kartını (Google / .docx / .pdf) kullanın.
- Profesyonel İpucu: Kodlama projenizi oluştururken önceki derste kullandığınız detayları göz önünde bulundurun. Engellerden kaçınarak her açıya ve mesafeye dikkat edin ve yol planınızı oluşturmak için sürüşünüzü ayrıntılı bir şekilde belgelendirin.
Adım 3: Robotun görevi tamamlamasını kodlayın.
- Adım 2'de planladığınız yolu kullanarak robotun üç engeli olabildiğince hızlı bir şekilde aşmasını sağlayın.
- Uygulamanızı yönlendirmek için bu görev kartını (Google / .docx / .pdf) kullanın.
- Profesyonel İpucu: Açı ve mesafe parametrelerinizi belirlemeye başlamanıza yardımcı olması için Robot Açıölçeri ve bir cetveli kullanın.
Adım 4: Robotunuzun her iki namlu etrafında hareket ederken hızını artırmak için Tahmin Et-Sür-Ölç-Kodla sürecini kullanın:
- Tahmin etmek
- Robotunuzun hızını artırmak için küçük bir ayarlama yapmak üzere bir açı seçin. Bu cümle kökünü kullanarak açının nasıl iyileştirilebileceğine dair bir grup tahmini yapın ve bunu günlüğünüze kaydedin:
- Açının yaklaşık ____________ derece olması gerektiğini düşünüyoruz.
- Robotunuzun hızını artırmak için küçük bir ayarlama yapmak üzere bir açı seçin. Bu cümle kökünü kullanarak açının nasıl iyileştirilebileceğine dair bir grup tahmini yapın ve bunu günlüğünüze kaydedin:
- Sürücü
- Tahmininizi, robotunuzu tahmin ettiğiniz açıda sürerek test edin. Eğer yanlış hissediyorsanız, daha doğru hale getirmek için neyi değiştirmeniz gerektiğini düşünüyorsunuz? Değilse, bu konuda doğru olan ne?
- Ölçüm
- Robot Açıölçerinizi robotun altına yerleştirin. Robotu hangi açıyla sürdünüz?
- Kod
- Yeni açınızı kodlama projenizde kullanın! Projenizi ayarlayın ve ardından test etmek için çalıştırın. Yeni açının hassasiyeti robotunuzun hızını artırıyor mu? Aksi takdirde Robot Açıölçerinizi kullanarak açıyı değiştirin ve tekrar deneyin. Yaptıkça açı ölçümlerinizi ve gözlemlerinizi günlüğünüze kaydetmeyi unutmayın.
Uygulama Kaynakları:
Aktiviteyi tamamlarken ek desteğe ihtiyaç duymanız halinde, burada bağlantıları verilen makalelere ulaşabilirsiniz.
Videoyu izleyip tartıştığınıza göre şimdi sıra sizde!
Adım 1: Alanı aşağıda gösterildiği gibi ayarlayın.
Adım 2: Sürüş modunu kullanarak robotun görevi tamamlaması için gereken hareketlerini modelleyin.
- Göreviniz robotu üç engelin etrafından olabildiğince hızlı bir şekilde geçirmektir. Sürüşünüzü belgelendirin, ardından bu hareketi nasıl kodlayacağınızı planlayın.
- Uygulamanızı yönlendirmek için bu görev kartını (Google / .docx / .pdf) kullanın.
- Profesyonel İpucu: Kodlama projenizi oluştururken önceki derste kullandığınız detayları göz önünde bulundurun. Engellerden kaçınarak her açıya ve mesafeye dikkat edin ve yol planınızı oluşturmak için sürüşünüzü ayrıntılı bir şekilde belgelendirin.
Adım 3: Robotun görevi tamamlamasını kodlayın.
- Adım 2'de planladığınız yolu kullanarak robotun üç engeli olabildiğince hızlı bir şekilde aşmasını sağlayın.
- Uygulamanızı yönlendirmek için bu görev kartını (Google / .docx / .pdf) kullanın.
- Profesyonel İpucu: Açı ve mesafe parametrelerinizi belirlemeye başlamanıza yardımcı olması için Robot Açıölçeri ve bir cetveli kullanın.
Adım 4: Robotunuzun her iki namlu etrafında hareket ederken hızını artırmak için Tahmin Et-Sür-Ölç-Kodla sürecini kullanın:
- Tahmin etmek
- Robotunuzun hızını artırmak için küçük bir ayarlama yapmak üzere bir açı seçin. Bu cümle kökünü kullanarak açının nasıl iyileştirilebileceğine dair bir grup tahmini yapın ve bunu günlüğünüze kaydedin:
- Açının yaklaşık ____________ derece olması gerektiğini düşünüyoruz.
- Robotunuzun hızını artırmak için küçük bir ayarlama yapmak üzere bir açı seçin. Bu cümle kökünü kullanarak açının nasıl iyileştirilebileceğine dair bir grup tahmini yapın ve bunu günlüğünüze kaydedin:
- Sürücü
- Tahmininizi, robotunuzu tahmin ettiğiniz açıda sürerek test edin. Eğer yanlış hissediyorsanız, daha doğru hale getirmek için neyi değiştirmeniz gerektiğini düşünüyorsunuz? Değilse, bu konuda doğru olan ne?
- Ölçüm
- Robot Açıölçerinizi robotun altına yerleştirin. Robotu hangi açıyla sürdünüz?
- Kod
- Yeni açınızı kodlama projenizde kullanın! Projenizi ayarlayın ve ardından test etmek için çalıştırın. Yeni açının hassasiyeti robotunuzun hızını artırıyor mu? Aksi takdirde Robot Açıölçerinizi kullanarak açıyı değiştirin ve tekrar deneyin. Yaptıkça açı ölçümlerinizi ve gözlemlerinizi günlüğünüze kaydetmeyi unutmayın.
Uygulama Kaynakları:
Aktiviteyi tamamlarken ek desteğe ihtiyaç duymanız halinde, burada bağlantıları verilen makalelere ulaşabilirsiniz.
Başlangıçta ön planda grup çalışması beklentileri. Kodlamada işbirliği rolleri hakkında daha fazla bilgi edinmek için, çift programlama hakkındaki bu makaleyi görüntüleyin. Şuna benzer sorular sorun:
- Grubunuz bu aktiviteye nasıl başlayacak?
- Herkesin sürüşe ve kodlamaya katkıda bulunmasını nasıl sağlayacaksınız?
Adım görev kartını her öğrenciye dağıtın (Google / .docx / .pdf). Unutmayın, robotu görevi tamamlamak için sürmenin amacı, öğrencilerin görevin fiziksel bir modelini geliştirmeleri ve kodlamaya başladıklarında bundan bir hesaplama modeli oluşturmalarıdır. Tüm öğrencilerin Rehberli Uygulamanın sürüş bölümünde sürüş, belgeleme ve yol planlaması için gerekli zamanı ayırdıklarından emin olun. Basit görevlerle iyi alışkanlıklar oluşturmak, görevler daha karmaşık hale geldikçe daha sonra işe yarayacaktır.
Öğrenciler sürüş pratiklerini tamamladıkça, sınıfta dolaşarak öğrencilerin öğrenme süreçleri hakkında bilgi alır. Şuna benzer sorular sorun:
- Sürüş sırasında kodlamanıza yardımcı olacağını düşündüğünüz dikkat ettiğiniz bir şey var mı? Bu sizin için neden önemli?
- Herkes aynı şekilde mi araç kullandı ve belgeleme yaptı? Benzer veya farklı olan nedir? Fikirlerinizi ortak bir planda nasıl birleştirebilirsiniz?
Her öğrenci sürüş için başarı kriterlerini karşıladıktan ve yol planlarını sizinle paylaştıktan sonra Adım 3 görev kartını onlara dağıtın (Google / .docx / .pdf). Öğrenciler daha sonra planlarını VEXcode projelerini oluşturmak için temel olarak kullanacaklar. Öğrencilerin projelerini oluştururken ve test ederken sürüş belgelerine eklemeler yapmalarını teşvik edin; böylece hangi stratejilerin ve ayrıntıların en yararlı olduğunu belirlemelerine yardımcı olun. Ayrıca geri al ve yinele butonlarını da kullanarak işlemlerinizi kolaylaştırabilirsiniz. Öğrencilere, projelerini başarıyla kodlamalarına yardımcı olmak için istedikleri zaman araç kullanmaya geri dönebileceklerini hatırlatın.
Öğrencilerin yollarını planlarken çıktı olarak aldıkları Robot Açıölçer kullanmaları teşvik edilir. Eğer öğrencilerin yazıcıya erişimi yoksa, bunu onlar için yazdırın.
Öğrenciler robotu kodlarken, sınıfta dolaşarak öğrencilerin kodlama ilerlemeleri ve anlayışları hakkında tartışmalara katılır. Şunlara benzer sorular sorun:
- Derste öğrendiklerinizi açı ölçülerinizi seçerken nasıl kullanıyorsunuz?
- Robotun hareket hızı ile hassasiyet arasında nasıl bir ilişki olduğunu düşünüyorsunuz?
- Grubunuz bu görevi birlikte tamamlamak için nasıl işbirliği yaptı?
4. Adım, öğrencilerin projelerini geliştirmek ve görev için en iyi stratejiyi bulmak amacıyla sürüş ve kodlama arasında geçiş yaparak yineleme ve keşfetmeyi teşvik etmek için tasarlanmıştır. Öğrenciler, robotlarının hareketinde bir seferde bir şeyi iyileştirmelerine yardımcı olmak için Tahmin Et-Sür-Ölç-Kodla sürecini kullanmalı, genel hızlarını artıracak olan hassasiyete yönelik küçük açı ayarlamalarına odaklanmalıdır. Projelerini geliştirmek için süreci tekrar tekrar gözden geçirmeleri gerekir. Bu süreci kolaylaştırmak için şu gibi sorular sorun:
- Test sonuçlarınız tahminlerinizle uyuştu mu? Hangi ayarlamaları yapmanız gerekiyor?
- Sürüşten önce açıyı tahmin etmek robotunuzun hareketlerinin hassasiyetini artırmanıza nasıl yardımcı olur?
- Açılarınızın hassasiyetini artırmak robotunuzun üç namlunun etrafında daha hızlı dolaşmasına yardımcı oluyor mu? Nereden biliyorsunuz?
- Bu süreçte günlüğünüze neler yazdınız? Dokümantasyon sürecinizi nasıl iyileştirebilirsiniz?
Özet
Artık pratik yaptığınıza göre, öğrendiklerinizi paylaşmanın zamanı geldi. Öğreniminizi yansıtmanıza ve tüm sınıfın katılacağı bir tartışmaya hazırlanmanıza yardımcı olması için aşağıdaki soruları günlüğünüze yanıtlayın:
- Araba kullanırken öğrendiğiniz ve kodlamada size yardımcı olan bir şey var mı? Bu öğrenmeyi nasıl belgelendirdiniz?
- Görevi tamamlamak için zamanınızı optimize etme konusunda öğrendiğiniz bir şey var mı?
- En iyi açı ve mesafe ölçümlerini belirlemek için grubunuzla nasıl işbirliği yaptınız?
Artık pratik yaptığınıza göre, öğrendiklerinizi paylaşmanın zamanı geldi. Öğreniminizi yansıtmanıza ve tüm sınıfın katılacağı bir tartışmaya hazırlanmanıza yardımcı olması için aşağıdaki soruları günlüğünüze yanıtlayın:
- Araba kullanırken öğrendiğiniz ve kodlamada size yardımcı olan bir şey var mı? Bu öğrenmeyi nasıl belgelendirdiniz?
- Görevi tamamlamak için zamanınızı optimize etme konusunda öğrendiğiniz bir şey var mı?
- En iyi açı ve mesafe ölçümlerini belirlemek için grubunuzla nasıl işbirliği yaptınız?
Öğrencilerin öğrendiklerini tüm sınıfın katılacağı bir tartışmada paylaşmalarını sağlayın. Öğrencilerin günlüklerinde cevapladıkları sorular tartışmanın başlangıç noktasıdır. Öğrencilerin düşüncelerini ortak anlayışlar etrafında birleştirmelerine yardımcı olmak için takip soruları sorun. Aşağıdaki gibi sorularla devam edin:
- Eğer biri sizden zamanlı mücadeleyi tamamlama stratejinizi açıklamanızı isteseydi ne söylerdiniz?
- Açı ve mesafeleri nasıl buldunuz? Peki farklı yollar nelerdir? Bu dersin ilerlemenize nasıl yardımcı olabileceğini düşünüyorsunuz?
- Robotunuzu kodlama konusunda daha önce bilmediğiniz neleri biliyorsunuz? Bunu destekleyecek hangi kanıtınız var?
Öğrencilerin paylaşımlarına dayanarak, Ders 2'deki VEXcode kodlama uygulamalarının paylaşılan listesine ekleyin. Bu eserler, sınıfın robot kodlama konusundaki güncel anlayışını yansıtmalıdır.
Birim Mücadelesine geçmek için Sonraki > seçin.