
Nyní, když jste prozkoumali, jak změna parametrů úhlu může vylepšit vaše kódovací projekty, na tyto znalosti navážete tím, že naprogramujete svého robota tak, aby se co nejrychleji pohyboval kolem sady sudů. Zaměříte se na úpravu úhlů pro zlepšení přesnosti i rychlosti pohybu vašeho robota.
Podívejte se na video níže a dozvíte se více o:
- Použití malých úhlových úprav pro přesnost.
- Nastavení úhlů pro navigaci kolem překážek umístěných v různých vzdálenostech od robota.
Nyní, když jste si video prohlédli, si zaznamenejte své myšlenky do deníku. Odpovězte na tyto otázky, které vám pomohou usměrnit vaše myšlení a připravit se na diskusi s celou třídou:
- Uveďte alespoň dvě otázky, které máte ohledně toho, jak se parametry úhlu a vzdálenosti mění v závislosti na vzdálenosti objektů od robota.
- Jak byste využili malé úhlové úpravy pro dosažení přesnosti?
- Co jsi ve videu pozoroval/a, co podporuje tvůj názor?
- Co jste se naučili o programování nebo VEXcode, co vám v této lekci pomůže?
Nyní, když jste si video prohlédli, si zaznamenejte své myšlenky do deníku. Odpovězte na tyto otázky, které vám pomohou usměrnit vaše myšlení a připravit se na diskusi s celou třídou:
- Uveďte alespoň dvě otázky, které máte ohledně toho, jak se parametry úhlu a vzdálenosti mění v závislosti na vzdálenosti objektů od robota.
- Jak byste využili malé úhlové úpravy pro dosažení přesnosti?
- Co jsi ve videu pozoroval/a, co podporuje tvůj názor?
- Co jste se naučili o programování nebo VEXcode, co vám v této lekci pomůže?
Poté, co si studenti shlédnou video a před procvičováním, se sejděte k diskusi s celou třídou. Použijte odpovědi studentů na zadané otázky jako základ pro diskusi.
Zaznamenejte si příspěvky studentů na tabuli, aby je všichni viděli a mohli na nich vzájemně rozvíjet. Připomeňte jim, aby se podívali do svých deníků nebo na vizuální materiály z videa, které jim pomohou jasně vyjádřit jejich myšlenky.
Řízená praxe
Teď, když jste si video prohlédli a probrali, je řada na vás, abyste si procvičili!
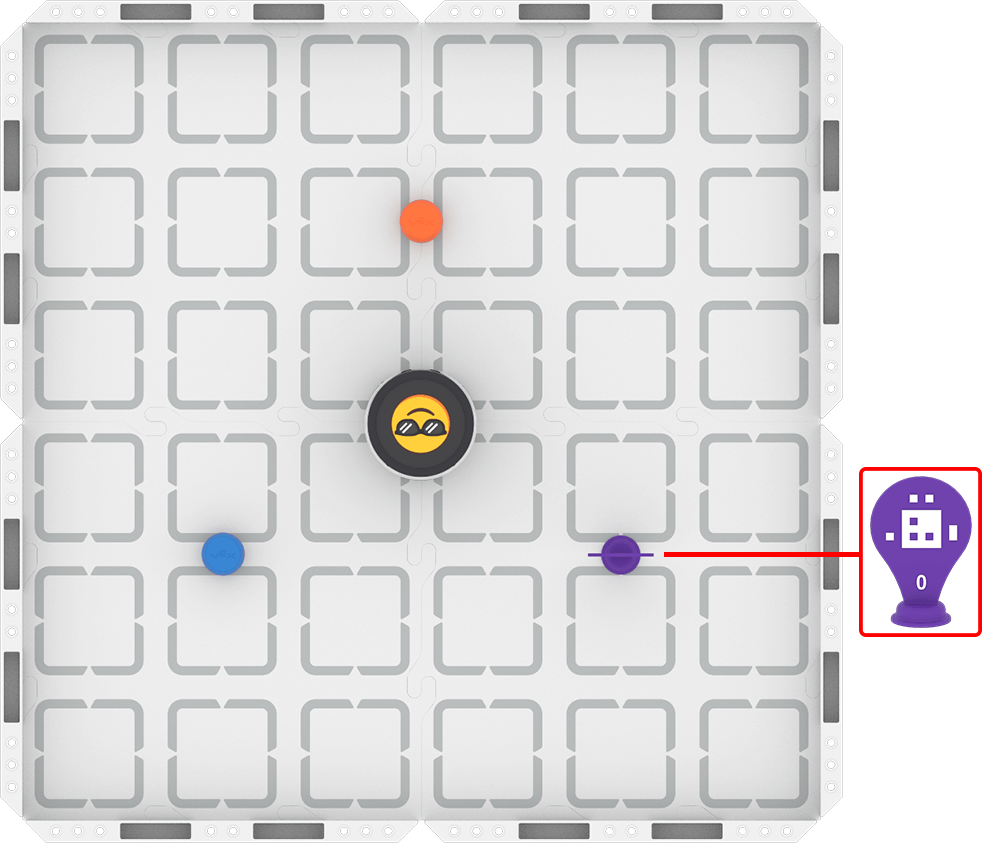
Krok 1: Nastavte pole, jak je znázorněno níže.
Krok 2: Pomocí režimu Pohon modelujte pohyby robota potřebné k dokončení úkolu.
- Vaším úkolem je co nejrychleji objet s robotem tři překážky. Zdokumentujte si řízení a poté si naplánujte, jak tento pohyb kódovat.
- Použijte tuto kartu s úkolem (Google / .docx / .pdf) jako vodítko pro váš procvičovací postup.
- Tip pro profesionály: Zvažte podrobnosti, které jste použili v předchozí lekci, abyste vytvořili svůj kódovací projekt. Věnujte pozornost každému úhlu a vzdálenosti a vyhýbejte se překážkám. Řidiči si podrobně zdokumentujte cestu, abyste si mohli naplánovat trasu.
Krok 3: Naprogramujte robota tak, aby dokončil úkol.
- Použijte plánovanou cestu z kroku 2 k naprogramování robota, aby se co nejrychleji pohyboval kolem tří překážek.
- Použijte tuto kartu s úkolem (Google / .docx / .pdf) jako vodítko pro váš procvičovací postup.
Krok 4: Použijte proces Predikce-Řízení-Změření-Kód ke zlepšení rychlosti robota při jeho pohybu kolem obou sudů:
- Předpovědět
- Vyberte jeden úhel, který chcete malou úpravou upravit, abyste zlepšili rychlost robota. Vytvořte skupinovou předpověď o tom, jak zlepšit úhel pomocí této větné základny, a zapište si ji do deníku:
- Myslíme si, že úhel by měl být přibližně ____________ stupňů.
- Vyberte jeden úhel, který chcete malou úpravou upravit, abyste zlepšili rychlost robota. Vytvořte skupinovou předpověď o tom, jak zlepšit úhel pomocí této větné základny, a zapište si ji do deníku:
- Pohon
- Otestujte si svou předpověď tím, že budete s robotem řídit pod vámi předpokládaným úhlem. Pokud se vám to zdá divné, co si myslíte, že byste měli změnit, aby to bylo přesnější? Pokud ne, co se na tom zdá správné?
- Opatření
- Umístěte robotický úhloměr pod robota. Pod jakým úhlem jsi vlastně s robotem řídil?
- Kód
- Využijte svůj nový úhel pohledu ve svém kódovacím projektu! Upravte svůj projekt a poté jej spusťte pro otestování. Zlepšuje přesnost nového úhlu rychlost vašeho robota? Pokud ne, použijte k změně úhlu robotický úhloměr a zkuste to znovu. Nezapomeňte si během práce zaznamenávat naměřené úhly a pozorování do deníku.
Zdroje pro praxi:
Pokud budete při provádění aktivity potřebovat další podporu, jsou k dispozici články, na které zde odkazujeme.
Teď, když jste si video prohlédli a probrali, je řada na vás, abyste si procvičili!
Krok 1: Nastavte pole, jak je znázorněno níže.
Krok 2: Pomocí režimu Pohon modelujte pohyby robota potřebné k dokončení úkolu.
- Vaším úkolem je co nejrychleji objet s robotem tři překážky. Zdokumentujte si řízení a poté si naplánujte, jak tento pohyb kódovat.
- Použijte tuto kartu s úkolem (Google / .docx / .pdf) jako vodítko pro váš procvičovací postup.
- Tip pro profesionály: Zvažte podrobnosti, které jste použili v předchozí lekci, abyste vytvořili svůj kódovací projekt. Věnujte pozornost každému úhlu a vzdálenosti a vyhýbejte se překážkám. Řidiči si podrobně zdokumentujte cestu, abyste si mohli naplánovat trasu.
Krok 3: Naprogramujte robota tak, aby dokončil úkol.
- Použijte plánovanou cestu z kroku 2 k naprogramování robota, aby se co nejrychleji pohyboval kolem tří překážek.
- Použijte tuto kartu s úkolem (Google / .docx / .pdf) jako vodítko pro váš procvičovací postup.
Krok 4: Použijte proces Predikce-Řízení-Změření-Kód ke zlepšení rychlosti robota při jeho pohybu kolem obou sudů:
- Předpovědět
- Vyberte jeden úhel, který chcete malou úpravou upravit, abyste zlepšili rychlost robota. Vytvořte skupinovou předpověď o tom, jak zlepšit úhel pomocí této větné základny, a zapište si ji do deníku:
- Myslíme si, že úhel by měl být přibližně ____________ stupňů.
- Vyberte jeden úhel, který chcete malou úpravou upravit, abyste zlepšili rychlost robota. Vytvořte skupinovou předpověď o tom, jak zlepšit úhel pomocí této větné základny, a zapište si ji do deníku:
- Pohon
- Otestujte si svou předpověď tím, že budete s robotem řídit pod vámi předpokládaným úhlem. Pokud se vám to zdá divné, co si myslíte, že byste měli změnit, aby to bylo přesnější? Pokud ne, co se na tom zdá správné?
- Opatření
- Umístěte robotický úhloměr pod robota. Pod jakým úhlem jsi vlastně s robotem řídil?
- Kód
- Využijte svůj nový úhel pohledu ve svém kódovacím projektu! Upravte svůj projekt a poté jej spusťte pro otestování. Zlepšuje přesnost nového úhlu rychlost vašeho robota? Pokud ne, použijte k změně úhlu robotický úhloměr a zkuste to znovu. Nezapomeňte si během práce zaznamenávat naměřené úhly a pozorování do deníku.
Zdroje pro praxi:
Pokud budete při provádění aktivity potřebovat další podporu, jsou k dispozici články, na které zde odkazujeme.
Očekávání práce ve skupině v popředí na začátku. Chcete-li se dozvědět více o rolích pro spolupráci v kódování, přečtěte si tento článek o párovém programování. Ptejte se na otázky typu:
- Jak vaše skupina začne s touto aktivitou?
- Jak zajistíte, aby se k řízení a programování připojil každý?
Rozdejte každému studentovi kartu s úkolem z kroku 2. (Google / .docx / .pdf). Nezapomeňte, že cílem řízení robota k dokončení úkolu je, aby studenti vyvinuli fyzický model úkolu, ze kterého si na začátku programování vytvoří výpočetní model. Zajistěte, aby si všichni studenti během části řízené praxe s řidičem udělali čas potřebný k řízení, dokumentaci a plánování trasy. Vytvoření dobrých návyků s jednoduchými úkoly pomůže později, až se úkoly stanou složitějšími.
Zatímco studenti dokončují výcvik v řízení, se pohybuje po místnosti a informuje se s nimi o tom, jak se učí. Ptejte se na otázky typu:
- Na co si myslíte, že vám při programování pomůže, a na co si dáváte pozor při řízení? Proč je to pro vás důležité?
- Řídili a dokumentovali všichni stejně? Co je podobné nebo odlišné? Jak můžete spojit své nápady do společného plánu?
Rozdejte každému studentovi kartu s úkolem z kroku 3 poté, co splní kritéria úspěšnosti pro řízení a podělí se s vámi o svůj plán trasy (Google / .docx / .pdf). Studenti pak své plány použijí jako základ pro tvorbu svých projektů VEXcode. Povzbuďte studenty, aby při tvorbě a testování svých projektů doplňovali svou dokumentaci k řízení, což jim pomůže identifikovat nejužitečnější strategie a detaily. Mohou také použít tlačítka pro návrat zpět a opakování. Připomeňte studentům, že se mohou kdykoli vrátit k řízení, což jim pomůže úspěšně naprogramovat jejich projekt.
Studenti se vyzývají, aby při plánování své trasy používali vytištěný robotický úhloměr . Pokud studenti nemají přístup k tiskárně, vytiskněte jim to.
Zatímco studenti programují robota, se pohybujte po místnosti a zapojujte je do diskusí, abyste se dozvěděli o jejich pokroku v programování a o tom, co pochopili. Ptejte se na otázky typu:
- Jak využíváte to, co jste se v lekci naučili, k výběru rozměrů úhlů?
- Jak si myslíte, že spolu souvisí přesnost a rychlost, s jakou se robot pohybuje?
- Jak vaše skupina spolupracovala na společném splnění tohoto úkolu?
4 je navržen tak, aby podporoval iteraci a zkoumání studentů přechodem mezi řízením a programováním s cílem vylepšit jejich projekty a najít nejlepší strategii pro daný úkol. Studenti by měli používat proces Předpovědět-Řídit-Změřit-Kód , který jim pomůže vylepšit jednu věc v pohybu jejich robota, se zaměřením na malé úpravy úhlu pro zvýšení přesnosti, což zlepší jejich celkovou rychlost. Měli by proces opakovaně procházet, aby svůj projekt vylepšili. Pro usnadnění tohoto procesu si položte otázky, jako například:
- Shodovaly se výsledky testů s vaší předpovědí? Jaké úpravy je třeba provést?
- Jak vám předpovídání úhlu před jízdou pomáhá zlepšit přesnost pohybů vašeho robota?
- Pomáhá zlepšení přesnosti úhlů vašemu robotovi rychleji objíždět všechny tři sudy? Jak to víš?
- Co jste si během tohoto procesu zaznamenal/a ve svém deníku? Jak můžete vylepšit svůj proces dokumentace?
Shrnutí
Teď, když jste si to procvičili, je čas podělit se o to, co jste se naučili. Odpovězte na následující otázky ve svém deníku, které vám pomohou zamyslet se nad svými vědomostmi a připravit se na diskusi s celou třídou:
- Co jste se naučil/a za volantem, co vám pomohlo při programování? Jak jste toto učení dokumentovali?
- Co jste se dozvěděli o optimalizaci času potřebného k dokončení úkolu?
- Jak jste se svou skupinou spolupracovali na určení nejlepších měření úhlů a vzdáleností?
Teď, když jste si to procvičili, je čas podělit se o to, co jste se naučili. Odpovězte na následující otázky ve svém deníku, které vám pomohou zamyslet se nad svými vědomostmi a připravit se na diskusi s celou třídou:
- Co jste se naučil/a za volantem, co vám pomohlo při programování? Jak jste toto učení dokumentovali?
- Co jste se dozvěděli o optimalizaci času potřebného k dokončení úkolu?
- Jak jste se svou skupinou spolupracovali na určení nejlepších měření úhlů a vzdáleností?
Veďte studenty ke sdílení svých znalostí v diskusi s celou třídou. Otázky, na které studenti odpověděli ve svém deníku, jsou výchozím bodem pro diskusi. Pokládejte doplňující otázky, které studentům pomohou soustředit jejich myšlení na společné poznatky. Následně se ptejte na otázky typu:
- Kdyby se vás někdo zeptal, jak vysvětlujete svou strategii pro splnění časově omezené výzvy, co byste řekli?
- Jak jste zjistili úhly a vzdálenosti? Jaké jsou některé z různých způsobů? Jak si myslíte, že by vám tato lekce mohla pomoci posunout se dál?
- Co teď víte o programování robota, co jste před praxí nevěděli? Jaké důkazy k tomu máte?
Doplňte sdílený seznam postupů kódování ve VEXcode z lekce 2 na základě toho, co sdílejí studenti. Tyto artefakty by měly odrážet aktuální znalosti třídy o programování robotů.
Vyberte Další > a přejděte k Výzvě jednotek.