
Maintenant que vous avez exploré comment la modification des paramètres d'angle peut améliorer vos projets de codage, vous allez développer ces connaissances en codant votre robot pour naviguer autour d'un ensemble de barils aussi rapidement que possible. Vous vous concentrerez sur le réglage des angles pour améliorer à la fois la précision et la vitesse du mouvement de votre robot.
Regardez la vidéo ci-dessous pour en savoir plus sur :
- Utilisation de petits ajustements d'angle pour plus de précision.
- Réglage des angles pour contourner les obstacles placés à différentes distances du robot
Maintenant que vous avez regardé la vidéo, notez vos pensées dans votre journal. Répondez à ces questions pour guider votre réflexion et vous aider à préparer une discussion en classe entière :
- Énumérez au moins deux questions que vous vous posez sur la façon dont les paramètres d’angle et de distance varient en fonction de la distance entre les objets et le robot.
- Comment utiliseriez-vous de petits ajustements d’angle pour plus de précision ?
- Qu’avez-vous observé dans la vidéo qui appuie votre réflexion ?
- Qu'avez-vous appris sur le codage ou sur VEXcode qui vous aidera dans cette leçon ?
Maintenant que vous avez regardé la vidéo, notez vos pensées dans votre journal. Répondez à ces questions pour guider votre réflexion et vous aider à préparer une discussion en classe entière :
- Énumérez au moins deux questions que vous vous posez sur la façon dont les paramètres d’angle et de distance varient en fonction de la distance entre les objets et le robot.
- Comment utiliseriez-vous de petits ajustements d’angle pour plus de précision ?
- Qu’avez-vous observé dans la vidéo qui appuie votre réflexion ?
- Qu'avez-vous appris sur le codage ou sur VEXcode qui vous aidera dans cette leçon ?
Après que les élèves ont regardé la vidéo et avant de s'entraîner, se réunissent pour une discussion en classe entière. Utilisez les réponses des élèves aux questions fournies comme base de discussion.
Notez les contributions des élèves au tableau afin que chacun puisse voir et développer les idées des autres. Rappelez-leur de se référer à leurs journaux ou aux visuels de la vidéo pour les aider à exprimer leurs idées avec clarté.
Pratique guidée
Maintenant que vous avez regardé et discuté de la vidéo, c'est à votre tour de pratiquer !
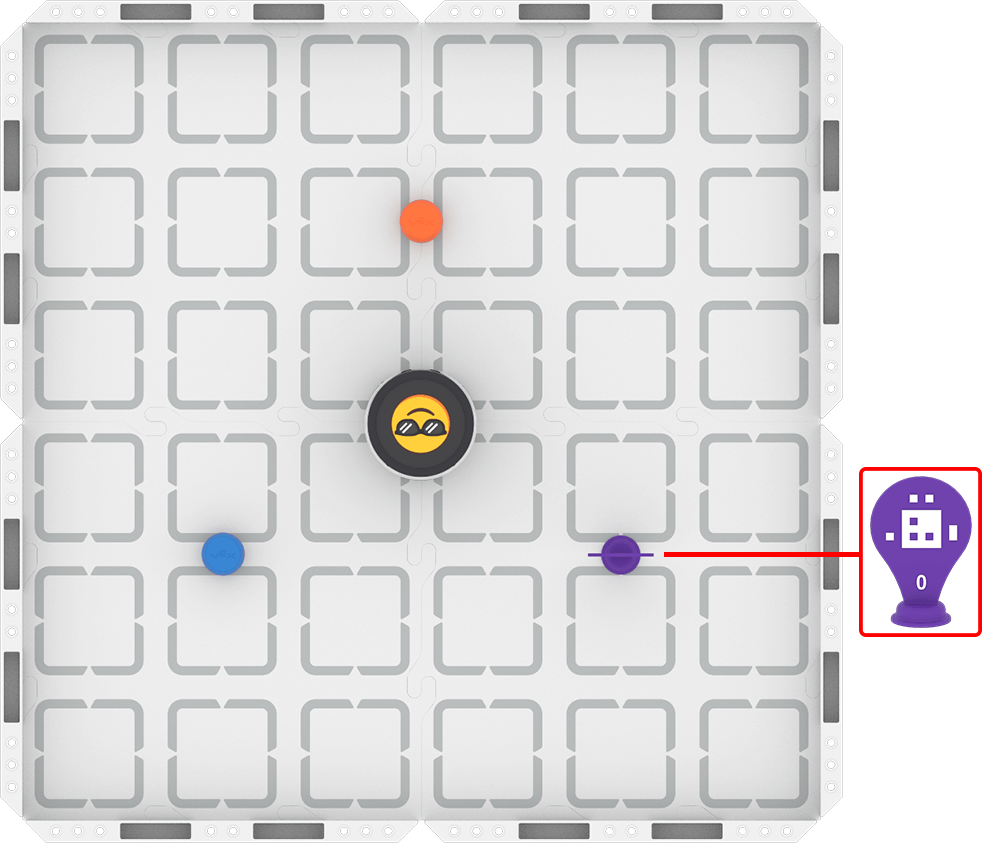
Étape 1: Configurez le champ comme indiqué ci-dessous.
Étape 2 : Modélisez les mouvements du robot nécessaires pour accomplir la tâche à l’aide du mode Drive.
- Votre tâche consiste à conduire le robot autour des trois obstacles aussi rapidement que possible. Documentez votre conduite, puis planifiez comment coder ce mouvement.
- Utilisez cette fiche de tâches (Google / .docx / .pdf) pour guider votre pratique.
- Conseil de pro : tenez compte des détails que vous avez utilisés dans la leçon précédente pour créer votre projet de codage. Faites attention à chaque angle et à chaque distance tout en évitant les obstacles et documentez votre conduite en détail pour créer votre plan de parcours.
Étape 3 : Codez le robot pour terminer la tâche.
- Utilisez votre chemin prévu à l’étape 2 pour coder le robot afin qu’il se déplace autour des trois obstacles le plus rapidement possible.
- Utilisez cette fiche de tâches (Google / .docx / .pdf) pour guider votre pratique.
- Conseil de pro : utilisez le Robot Protractor et une règle pour vous aider à commencer à déterminer vos paramètres d’angle et de distance.
Étape 4 : Utilisez le processus Prédire-Conduire-Mesurer-Code pour améliorer la vitesse de votre robot lorsqu'il se déplace autour des deux barils :
- Prédire
- Choisissez un angle sur lequel effectuer un petit ajustement afin d'améliorer la vitesse de votre robot. Faites une prédiction de groupe sur la façon d'améliorer l'angle en utilisant cette racine de phrase et enregistrez-la dans votre journal :
- Nous pensons que l’angle devrait être d’environ ____________ degrés.
- Choisissez un angle sur lequel effectuer un petit ajustement afin d'améliorer la vitesse de votre robot. Faites une prédiction de groupe sur la façon d'améliorer l'angle en utilisant cette racine de phrase et enregistrez-la dans votre journal :
- Lecteur
- Testez votre prédiction en conduisant votre robot à l’angle prévu. Si cela ne vous semble pas correct, que pensez-vous devoir changer pour le rendre plus précis ? Si ce n'est pas le cas, qu'est-ce qui vous semble juste ?
- Mesure
- Placez votre rapporteur de robot sous le robot. À quel angle avez-vous réellement conduit le robot ?
- Code
- Utilisez votre nouvel angle dans votre projet de codage ! Ajustez votre projet, puis exécutez-le pour le tester. La précision du nouvel angle améliore-t-elle la vitesse de votre robot ? Sinon, utilisez votre rapporteur robot pour vous aider à modifier l’angle et réessayez. Assurez-vous d’enregistrer vos mesures d’angle et vos observations dans votre journal au fur et à mesure.
Ressources pour la pratique :
Les articles liés ici sont disponibles si vous avez besoin d'un soutien supplémentaire pour réaliser l'activité.
Maintenant que vous avez regardé et discuté de la vidéo, c'est à votre tour de pratiquer !
Étape 1: Configurez le champ comme indiqué ci-dessous.
Étape 2 : Modélisez les mouvements du robot nécessaires pour accomplir la tâche à l’aide du mode Drive.
- Votre tâche consiste à conduire le robot autour des trois obstacles aussi rapidement que possible. Documentez votre conduite, puis planifiez comment coder ce mouvement.
- Utilisez cette fiche de tâches (Google / .docx / .pdf) pour guider votre pratique.
- Conseil de pro : tenez compte des détails que vous avez utilisés dans la leçon précédente pour créer votre projet de codage. Faites attention à chaque angle et à chaque distance tout en évitant les obstacles et documentez votre conduite en détail pour créer votre plan de parcours.
Étape 3 : Codez le robot pour terminer la tâche.
- Utilisez votre chemin prévu à l’étape 2 pour coder le robot afin qu’il se déplace autour des trois obstacles le plus rapidement possible.
- Utilisez cette fiche de tâches (Google / .docx / .pdf) pour guider votre pratique.
- Conseil de pro : utilisez le Robot Protractor et une règle pour vous aider à commencer à déterminer vos paramètres d’angle et de distance.
Étape 4 : Utilisez le processus Prédire-Conduire-Mesurer-Coder pour améliorer la vitesse de votre robot lorsqu'il se déplace autour des deux barils :
- Prédire
- Choisissez un angle sur lequel effectuer un petit ajustement afin d'améliorer la vitesse de votre robot. Faites une prédiction de groupe sur la façon d'améliorer l'angle en utilisant cette racine de phrase et enregistrez-la dans votre journal :
- Nous pensons que l’angle devrait être d’environ ____________ degrés.
- Choisissez un angle sur lequel effectuer un petit ajustement afin d'améliorer la vitesse de votre robot. Faites une prédiction de groupe sur la façon d'améliorer l'angle en utilisant cette racine de phrase et enregistrez-la dans votre journal :
- Lecteur
- Testez votre prédiction en conduisant votre robot à l’angle prévu. Si cela ne vous semble pas correct, que pensez-vous devoir changer pour le rendre plus précis ? Si ce n'est pas le cas, qu'est-ce qui vous semble juste ?
- Mesure
- Placez votre rapporteur de robot sous le robot. À quel angle avez-vous réellement conduit le robot ?
- Code
- Utilisez votre nouvel angle dans votre projet de codage ! Ajustez votre projet, puis exécutez-le pour le tester. La précision du nouvel angle améliore-t-elle la vitesse de votre robot ? Sinon, utilisez votre rapporteur robot pour vous aider à modifier l’angle et réessayez. Assurez-vous d’enregistrer vos mesures d’angle et vos observations dans votre journal au fur et à mesure.
Ressources pour la pratique :
Les articles liés ici sont disponibles si vous avez besoin d'un soutien supplémentaire pour réaliser l'activité.
Attentes de travail de groupe au premier plan au début. Pour en savoir plus sur les rôles de collaboration dans le codage, cet article sur la programmation en. Posez des questions telles que :
- Comment votre groupe va-t-il démarrer cette activité ?
- Comment allez-vous vous assurer que tout le monde contribue à la conduite et au codage ?
Distribuez la carte de tâche de l'étape 2 à chaque élève (Google / .docx / .pdf). N'oubliez pas que l'objectif de la conduite du robot pour accomplir la tâche est que les élèves développent un modèle physique de la tâche, à partir duquel ils construiront un modèle informatique lorsqu'ils commenceront à coder. Assurez-vous que tous les élèves prennent le temps nécessaire pour conduire, documenter et planifier leur parcours pendant la partie conduite de la pratique guidée. Établir de bonnes habitudes avec des tâches simples vous aidera plus tard lorsque les tâches deviendront plus complexes.
Pendant que les élèves terminent leur pratique de conduite, circule dans la salle et vérifie auprès des élèves leur apprentissage. Posez des questions telles que :
- À quoi faites-vous attention lorsque vous conduisez et qui, selon vous, vous aidera à coder ? Pourquoi est-ce important pour vous ?
- Est-ce que tout le monde a conduit et documenté de la même manière ? Qu'est-ce qui est similaire ou différent ? Comment pouvez-vous combiner vos idées dans un plan partagé ?
Distribuez la carte de tâche de l'étape 3 à chaque élève après qu'il ait satisfait aux critères de réussite de la conduite et qu'il ait partagé son plan de parcours avec vous (Google / .docx / .pdf). Les étudiants utiliseront ensuite leurs plans comme base pour construire leurs projets VEXcode. Encouragez les élèves à enrichir leur documentation de conduite au fur et à mesure qu’ils construisent et testent leurs projets, pour les aider à identifier les stratégies et les détails les plus utiles. Ils peuvent également utiliser les boutons Annuler et Rétablir pour les aider. Rappelez aux élèves qu’ils peuvent reprendre la conduite à tout moment pour les aider à coder leur projet avec succès.
Les étudiants sont encouragés à utiliser le Robot Protractor imprimé lors de la planification de leur parcours. Si les élèves n’ont pas accès à une imprimante, imprimez ceci pour eux.
Pendant que les élèves codent le robot, circule dans la salle et engage les élèves dans des discussions pour en savoir plus sur leurs progrès et leurs compréhensions en matière de codage. Posez des questions telles que :
- Comment utilisez-vous ce que vous avez appris dans la leçon pour choisir vos mesures d’angle ?
- Selon vous, quel est le lien entre la précision et la vitesse à laquelle le robot se déplace ?
- Comment votre groupe a-t-il collaboré pour réaliser cette tâche ensemble ?
étape 4 est conçue pour favoriser l'itération et l'exploration des étudiants en passant de la conduite au codage pour améliorer leurs projets et trouver la meilleure stratégie pour la tâche. Les étudiants doivent utiliser le processus Prédire-Conduire-Mesurer-Coder pour les aider à améliorer une chose à la fois dans le mouvement de leur robot, en se concentrant sur de petits ajustements d'angle pour plus de précision, ce qui améliorera leur vitesse globale. Ils devraient répéter le processus à plusieurs reprises pour améliorer leur projet. Pour faciliter ce processus, posez des questions telles que :
- Les résultats de vos tests correspondent-ils à vos prévisions ? Quels ajustements devez-vous faire ?
- Comment la prédiction de l'angle avant de conduire vous aide-t-elle à améliorer la précision des mouvements de votre robot ?
- L’amélioration de la précision de vos angles aide-t-elle votre robot à se déplacer plus rapidement autour des trois barils ? Comment savez-vous?
- Qu’avez-vous documenté dans votre journal tout au long de ce processus ? Comment pouvez-vous améliorer votre processus de documentation ?
Conclure
Maintenant que vous avez pratiqué, il est temps de partager ce que vous avez appris. Répondez aux questions suivantes dans votre journal pour vous aider à réfléchir à votre apprentissage et à vous préparer à une discussion en classe entière :
- Qu'avez-vous appris en conduisant et qui vous a aidé à coder ? Comment avez-vous documenté cet apprentissage ?
- Qu’avez-vous appris sur l’optimisation de votre temps pour accomplir la tâche ?
- Comment avez-vous collaboré avec votre groupe pour déterminer les meilleures mesures d’angle et de distance ?
Maintenant que vous avez pratiqué, il est temps de partager ce que vous avez appris. Répondez aux questions suivantes dans votre journal pour vous aider à réfléchir à votre apprentissage et à vous préparer à une discussion en classe entière :
- Qu'avez-vous appris en conduisant et qui vous a aidé à coder ? Comment avez-vous documenté cet apprentissage ?
- Qu’avez-vous appris sur l’optimisation de votre temps pour accomplir la tâche ?
- Comment avez-vous collaboré avec votre groupe pour déterminer les meilleures mesures d’angle et de distance ?
Guidez les élèves pour qu’ils partagent leur apprentissage dans une discussion en classe entière. Les questions auxquelles les élèves ont répondu dans leur journal constituent le point de départ de la discussion. Posez des questions de suivi pour guider les élèves à converger leur réflexion autour de compréhensions communes. Poursuivez avec des questions telles que :
- Si quelqu'un vous demandait d'expliquer votre stratégie pour relever le défi chronométré, que diriez-vous ?
- Comment avez-vous trouvé vos angles et vos distances ? Quelles sont les différentes manières ? Comment pensez-vous que cette leçon pourrait vous aider à avancer ?
- Que savez-vous maintenant sur le codage de votre robot que vous ne saviez pas avant de vous entraîner ? Quelles preuves avez-vous pour étayer cela ?
Ajoutez à la liste partagée des pratiques de codage VEXcode de la leçon 2, en fonction de ce que les élèves partagent. Ces artefacts devraient refléter la compréhension actuelle de la classe en matière de codage de leurs robots.
Sélectionnez Suivant > pour passer au défi de l'unité.