
Ora che hai scoperto come la modifica dei parametri angolari può migliorare i tuoi progetti di codifica, approfondirai questa conoscenza programmando il tuo robot in modo che si muova attorno a una serie di barili il più velocemente possibile. Ti concentrerai sulla regolazione degli angoli per migliorare sia la precisione che la velocità dei movimenti del tuo robot.
Guarda il video qui sotto per saperne di più:
- Per una maggiore precisione, utilizzare piccole regolazioni angolari.
- Regolazione degli angoli per aggirare gli ostacoli posti a diverse distanze dal robot.
Ora che hai guardato il video, annota i tuoi pensieri nel tuo diario. Rispondi a queste domande per guidare il tuo pensiero e aiutarti a preparare una discussione con l'intera classe:
- Elenca almeno due domande su come i parametri angolo e distanza variano in base alla distanza degli oggetti dal robot.
- Come utilizzeresti le piccole regolazioni angolari per ottenere la precisione?
- Cosa hai osservato nel video che supporta il tuo ragionamento?
- Cosa hai imparato sulla programmazione o su VEXcode che ti sarà utile in questa lezione?
Ora che hai guardato il video, annota i tuoi pensieri nel tuo diario. Rispondi a queste domande per guidare il tuo pensiero e aiutarti a preparare una discussione con l'intera classe:
- Elenca almeno due domande su come i parametri angolo e distanza variano in base alla distanza degli oggetti dal robot.
- Come utilizzeresti le piccole regolazioni angolari per ottenere la precisione?
- Cosa hai osservato nel video che supporta il tuo ragionamento?
- Cosa hai imparato sulla programmazione o su VEXcode che ti sarà utile in questa lezione?
Dopo che gli studenti hanno guardato il video e prima di esercitarsi, si riuniscono per una discussione con l'intera classe. Utilizzare le risposte degli studenti alle domande fornite come base per la discussione.
Annota i contributi degli studenti sulla lavagna in modo che tutti possano vederli e sviluppare le idee degli altri. Ricordate loro di fare riferimento ai loro diari o alle immagini del video per aiutarli a esprimere le loro idee con chiarezza
Pratica guidata
Ora che hai guardato e commentato il video, è il tuo turno di esercitarti!
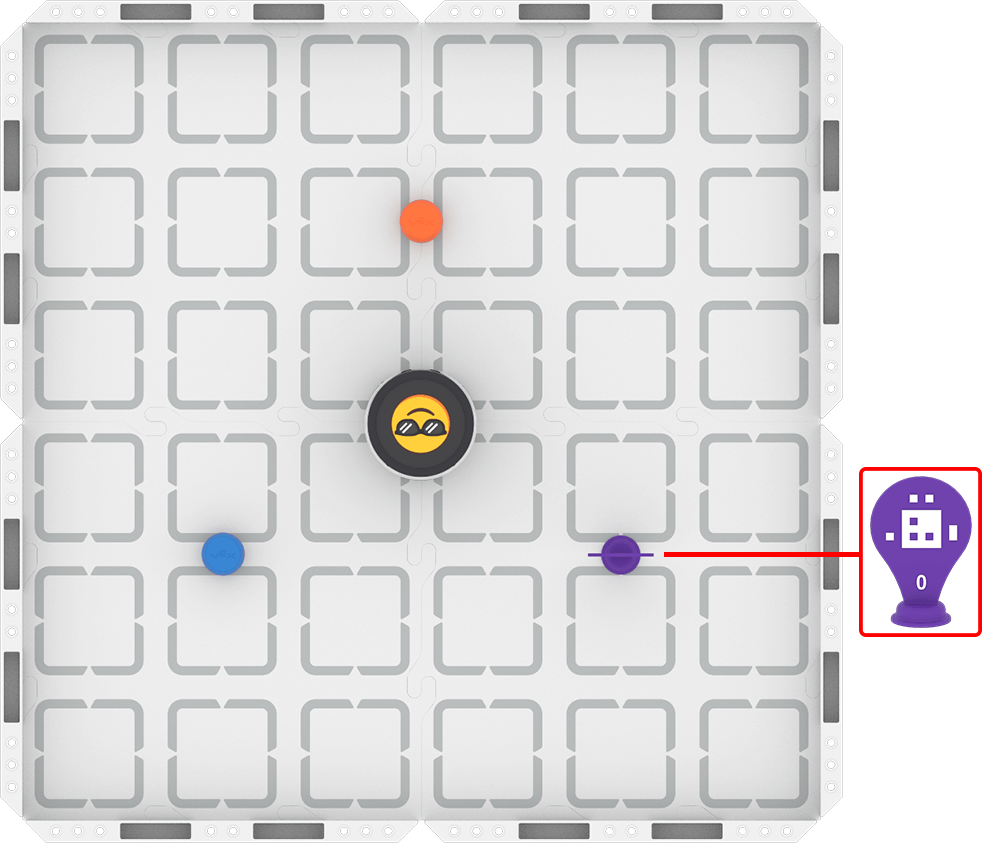
Fase 1: Impostare il campo come mostrato di seguito.
Fase 2: Modellare i movimenti del robot necessari per completare l'attività utilizzando la modalità Guida.
- Il tuo compito è guidare il robot attorno ai tre ostacoli il più velocemente possibile. Documenta la tua guida, quindi pianifica come codificare quel movimento.
- Utilizza questa scheda attività (Google / .docx / .pdf) per guidare la tua pratica.
- Suggerimento: prendi in considerazione i dettagli utilizzati nella lezione precedente per creare il tuo progetto di codifica. Presta attenzione a ogni angolo e distanza evitando gli ostacoli e documenta dettagliatamente la tua guida per creare il tuo piano di viaggio.
Fase 3: Programmare il robot per completare l'attività.
- Utilizza il percorso pianificato nel passaggio 2 per programmare il robot in modo che aggiri i tre ostacoli il più velocemente possibile.
- Utilizza questa scheda attività (Google / .docx / .pdf) per guidare la tua pratica.
- Suggerimento: utilizza il goniometro Robot Protractor e un righello per iniziare a determinare i parametri di angolo e distanza.
Fase 4: Utilizza il processo Prevedi-Guida-Misura-Codice per migliorare la velocità del tuo robot mentre si muove attorno a entrambi i barili:
- Prevedere
- Scegli un'angolazione su cui apportare una piccola regolazione per migliorare la velocità del tuo robot. Fate una previsione di gruppo su come migliorare l'angolazione utilizzando questa struttura di frase e annotatela nel vostro diario:
- Riteniamo che l'angolo dovrebbe essere di circa ___________ gradi.
- Scegli un'angolazione su cui apportare una piccola regolazione per migliorare la velocità del tuo robot. Fate una previsione di gruppo su come migliorare l'angolazione utilizzando questa struttura di frase e annotatela nel vostro diario:
- Unità
- Metti alla prova la tua previsione guidando il tuo robot all'angolazione prevista. Se ti sembra strano, cosa pensi di dover cambiare per renderlo più preciso? In caso contrario, cosa ti sembra giusto?
- Misura
- Posiziona il tuo goniometro per robot sotto il robot. A quale angolazione hai effettivamente guidato il robot?
- Codice
- Utilizza questa nuova prospettiva nel tuo progetto di codifica! Adatta il progetto, quindi eseguilo per testarlo. La precisione del nuovo angolo migliora la velocità del tuo robot? In caso contrario, utilizza il tuo robot goniometro per aiutarti a cambiare l'angolazione e riprova. Assicuratevi di annotare le misurazioni degli angoli e le osservazioni nel vostro diario man mano che procedete.
Risorse per la pratica:
Gli articoli linkati qui sono disponibili se hai bisogno di ulteriore supporto durante lo svolgimento dell'attività.
Ora che hai guardato e commentato il video, è il tuo turno di esercitarti!
Fase 1: Impostare il campo come mostrato di seguito.
Fase 2: Modellare i movimenti del robot necessari per completare l'attività utilizzando la modalità Guida.
- Il tuo compito è guidare il robot attorno ai tre ostacoli il più velocemente possibile. Documenta la tua guida, quindi pianifica come codificare quel movimento.
- Utilizza questa scheda attività (Google / .docx / .pdf) per guidare la tua pratica.
- Suggerimento: prendi in considerazione i dettagli utilizzati nella lezione precedente per creare il tuo progetto di codifica. Presta attenzione a ogni angolo e distanza evitando gli ostacoli e documenta dettagliatamente la tua guida per creare il tuo piano di viaggio.
Fase 3: Programmare il robot per completare l'attività.
- Utilizza il percorso pianificato nel passaggio 2 per programmare il robot in modo che aggiri i tre ostacoli il più velocemente possibile.
- Utilizza questa scheda attività (Google / .docx / .pdf) per guidare la tua pratica.
- Suggerimento: utilizza il goniometro Robot Protractor e un righello per iniziare a determinare i parametri di angolo e distanza.
Fase 4: Utilizza il processo Prevedi-Guida-Misura-Codice per migliorare la velocità del tuo robot mentre si muove attorno a entrambi i barili:
- Prevedere
- Scegli un'angolazione su cui apportare una piccola regolazione per migliorare la velocità del tuo robot. Fate una previsione di gruppo su come migliorare l'angolazione utilizzando questa struttura di frase e annotatela nel vostro diario:
- Riteniamo che l'angolo dovrebbe essere di circa ___________ gradi.
- Scegli un'angolazione su cui apportare una piccola regolazione per migliorare la velocità del tuo robot. Fate una previsione di gruppo su come migliorare l'angolazione utilizzando questa struttura di frase e annotatela nel vostro diario:
- Unità
- Metti alla prova la tua previsione guidando il tuo robot all'angolazione prevista. Se ti sembra strano, cosa pensi di dover cambiare per renderlo più preciso? In caso contrario, cosa ti sembra giusto?
- Misura
- Posiziona il tuo goniometro per robot sotto il robot. A quale angolazione hai effettivamente guidato il robot?
- Codice
- Utilizza questa nuova prospettiva nel tuo progetto di codifica! Adatta il progetto, quindi eseguilo per testarlo. La precisione del nuovo angolo migliora la velocità del tuo robot? In caso contrario, utilizza il tuo robot goniometro per aiutarti a cambiare l'angolazione e riprova. Assicuratevi di annotare le misurazioni degli angoli e le osservazioni nel vostro diario man mano che procedete.
Risorse per la pratica:
Gli articoli linkati qui sono disponibili se hai bisogno di ulteriore supporto durante lo svolgimento dell'attività.
Aspettative di lavoro di gruppo in primo piano all'inizio. Per saperne di più sui ruoli per la collaborazione nella codifica, visualizza questo articolo sulla programmazione in coppia. Fai domande come:
- Come intende iniziare questa attività il tuo gruppo?
- Come ti assicurerai che tutti contribuiscano alla guida e alla programmazione?
Distribuisci la scheda attività del passaggio 2 a ogni studente (Google / .docx / .pdf). Ricorda che l'obiettivo di guidare il robot per completare il compito è che gli studenti sviluppino un modello fisico del compito, da cui costruiranno un modello computazionale quando inizieranno a programmare. Assicurarsi che tutti gli studenti prendano il tempo necessario per guidare, documentare e pianificare il percorso durante la parte guidata della pratica guidata. Creare delle buone abitudini con compiti semplici sarà utile in seguito, quando i compiti diventeranno più complessi.
Una volta completata la pratica di guida, si muovono per l'aula e verificano con gli studenti quanto hanno imparato. Fai domande come:
- C'è una cosa a cui presti attenzione mentre guidi che pensi ti aiuterà a programmare? Perché è importante per te?
- Tutti guidavano e documentavano allo stesso modo? Cosa è simile o diverso? Come puoi combinare le tue idee in un piano condiviso?
Distribuisci la scheda di attività del passaggio 3 a ogni studente dopo che ha soddisfatto i criteri di successo per la guida e ha condiviso con te il suo piano di percorso (Google / .docx / .pdf). Gli studenti useranno poi i loro piani come base per realizzare i loro progetti VEXcode. Incoraggiate gli studenti ad ampliare la documentazione di guida man mano che realizzano e testano i loro progetti, per aiutarli a identificare quali strategie e dettagli sono più utili. Possono anche usare i pulsanti Annulla e Ripristina per aiutarsi. Ricordate agli studenti che possono riprendere a guidare in qualsiasi momento, per aiutarli a programmare con successo il loro progetto.
Si incoraggiano gli studenti a utilizzare il goniometro Robot Protractor stampato durante la pianificazione del percorso. Se gli studenti non hanno accesso a una stampante, stampate questo per loro.
Mentre gli studenti programmano il robot, si muovono per la stanza e li coinvolgono in discussioni per conoscere i loro progressi e le loro conoscenze in materia di programmazione. Fai domande come:
- Come stai utilizzando ciò che hai imparato nella lezione per scegliere le misure degli angoli?
- Secondo te, come sono correlati la precisione e la velocità con cui si muove il robot?
- Come ha collaborato il vostro gruppo per completare insieme questo compito?
Il passaggio 4 è progettato per promuovere l'iterazione e l'esplorazione degli studenti, alternando attività di guida e di codifica per migliorare i loro progetti e trovare la strategia migliore per il compito. Gli studenti dovrebbero usare il processo Prevedi-Guida-Misura-Codifica per aiutarli a migliorare un aspetto alla volta del movimento del loro robot, concentrandosi su piccole regolazioni angolari di precisione, che miglioreranno la loro velocità complessiva. Dovrebbero ripetere il processo più volte per migliorare il loro progetto. Per facilitare questo processo, poni domande come:
- I risultati dei test corrispondono alle tue previsioni? Quali modifiche devi apportare?
- In che modo prevedere l'angolazione prima di guidare ti aiuta a migliorare la precisione dei movimenti del tuo robot?
- Migliorare la precisione degli angoli aiuta il tuo robot a muoversi più velocemente attorno a tutti e tre i barili? Come fai a sapere?
- Cosa hai documentato nel tuo diario durante questo processo? Come puoi migliorare il tuo processo di documentazione?
Incartare
Ora che hai fatto pratica, è il momento di condividere ciò che hai imparato. Rispondi alle seguenti domande sul tuo diario per aiutarti a riflettere su ciò che hai imparato e prepararti per una discussione con l'intera classe:
- C'è qualcosa che hai imparato mentre guidavi che ti è stato utile nella programmazione? Come hai documentato tale apprendimento?
- Cosa hai imparato su come ottimizzare il tempo impiegato per completare il compito?
- Come avete collaborato con il vostro gruppo per determinare le migliori misurazioni di angoli e distanze?
Ora che hai fatto pratica, è il momento di condividere ciò che hai imparato. Rispondi alle seguenti domande sul tuo diario per aiutarti a riflettere su ciò che hai imparato e prepararti per una discussione con l'intera classe:
- C'è qualcosa che hai imparato mentre guidavi che ti è stato utile nella programmazione? Come hai documentato tale apprendimento?
- Cosa hai imparato su come ottimizzare il tempo impiegato per completare il compito?
- Come avete collaborato con il vostro gruppo per determinare le migliori misurazioni di angoli e distanze?
Guida gli studenti a condividere il loro apprendimento in una discussione che coinvolga l'intera classe. Le domande a cui gli studenti hanno risposto nel loro diario costituiscono il punto di partenza per la discussione. Poni domande di approfondimento per guidare gli studenti a convergere i loro pensieri su comprensioni condivise. Prosegui con domande come:
- Se qualcuno ti chiedesse di spiegare la tua strategia per completare la sfida a tempo, cosa diresti?
- Come hai trovato gli angoli e le distanze? Quali sono alcuni dei diversi modi? Come pensi che questa lezione possa aiutarti ad andare avanti?
- Cosa sai ora sulla programmazione del tuo robot che non sapevi prima di metterti in pratica? Quali prove hai per supportarlo?
Aggiungere all'elenco condiviso delle pratiche di codifica VEXcode della Lezione 2, in base a ciò che gli studenti condividono. Questi artefatti dovrebbero riflettere la comprensione attuale della classe sulla codifica dei loro robot.
Seleziona Avanti > per passare alla Sfida dell'unità.