
ตอนนี้คุณได้สำรวจแล้วว่าการเปลี่ยนพารามิเตอร์มุมสามารถปรับปรุงโครงการการเขียนโค้ดของคุณได้อย่างไร คุณจะสร้างความรู้ดังกล่าวโดยการเขียนโค้ดให้หุ่นยนต์ของคุณเคลื่อนที่ไปรอบๆ ถังต่างๆ ได้เร็วที่สุดเท่าที่จะเป็นไปได้ คุณจะเน้นการปรับมุมเพื่อปรับปรุงทั้งความแม่นยำและความเร็วในการเคลื่อนที่ของหุ่นยนต์ของคุณ
ชมวิดีโอด้านล่างเพื่อเรียนรู้เกี่ยวกับ:
- ใช้การปรับมุมเล็กๆ เพื่อความแม่นยำ
- การปรับมุมเพื่อนำทางผ่านสิ่งกีดขวางที่วางในระยะต่างๆ จากหุ่นยนต์
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามเหล่านี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- ระบุคำถามอย่างน้อยสองคำถามที่คุณมีเกี่ยวกับวิธีที่พารามิเตอร์มุมและระยะทางแตกต่างกันไปตามระยะห่างของวัตถุจากหุ่นยนต์
- คุณจะใช้การปรับมุมเล็กๆ เพื่อความแม่นยำได้อย่างไร?
- คุณสังเกตเห็นอะไรในวิดีโอที่สนับสนุนความคิดของคุณ?
- คุณได้เรียนรู้อะไรบ้างเกี่ยวกับการเขียนโค้ดหรือ VEXcode ที่จะช่วยคุณได้ในบทเรียนนี้?
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามเหล่านี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- ระบุคำถามอย่างน้อยสองคำถามที่คุณมีเกี่ยวกับวิธีที่พารามิเตอร์มุมและระยะทางแตกต่างกันไปตามระยะห่างของวัตถุจากหุ่นยนต์
- คุณจะใช้การปรับมุมเล็กๆ เพื่อความแม่นยำได้อย่างไร?
- คุณสังเกตเห็นอะไรในวิดีโอที่สนับสนุนความคิดของคุณ?
- คุณได้เรียนรู้อะไรบ้างเกี่ยวกับการเขียนโค้ดหรือ VEXcode ที่จะช่วยคุณได้ในบทเรียนนี้?
หลังจากที่นักเรียนชมวิดีโอแล้วและก่อนที่จะฝึกซ้อม จะมารวมกันเพื่ออภิปรายทั้งชั้นเรียน ใช้คำตอบของนักเรียนต่อคำถามที่ให้ไว้เป็นพื้นฐานสำหรับการอภิปราย
จดบันทึกความคิดเห็นของนักเรียนไว้บนกระดานเพื่อให้ทุกคนสามารถเห็นและต่อยอดความคิดของกันและกัน เตือนให้พวกเขาอ้างอิงวารสารหรือภาพจากวิดีโอเพื่อช่วยให้พวกเขาแสดงความคิดได้อย่างชัดเจน
การฝึกปฏิบัติแบบมีคำแนะนำ
ตอนนี้คุณได้ดูและอภิปรายวิดีโอแล้ว ก็ถึงคราวของคุณที่จะฝึกฝนแล้ว!
ขั้นตอนที่ 1: ตั้งค่าฟิลด์ตามที่แสดงด้านล่าง
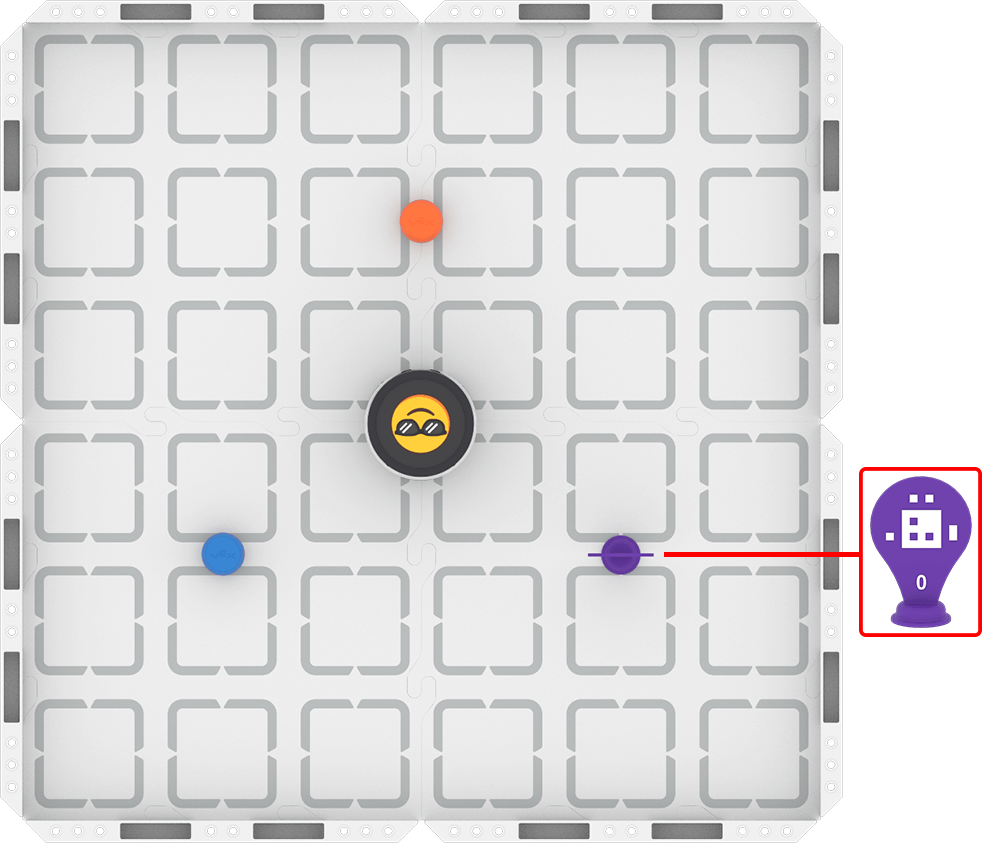
ขั้นตอน 2: สร้างแบบจำลองการเคลื่อนไหวของหุ่นยนต์ที่จำเป็นในการทำงานให้สำเร็จโดยใช้โหมดขับเคลื่อน
- ภารกิจของคุณคือขับหุ่นยนต์ไปรอบ ๆ สิ่งกีดขวางทั้งสามให้ได้เร็วที่สุดเท่าที่จะทำได้ บันทึกการขับขี่ของคุณ จากนั้นวางแผนว่าจะเข้ารหัสการเคลื่อนไหวนั้นอย่างไร
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: พิจารณารายละเอียดที่คุณใช้ในบทเรียนก่อนหน้านี้เพื่อสร้างโครงการการเขียนโค้ดของคุณ ใส่ใจในแต่ละมุมและระยะทางในขณะที่หลีกเลี่ยงสิ่งกีดขวาง และบันทึกการขับขี่ของคุณโดยละเอียดเพื่อสร้างแผนเส้นทางของคุณ
ขั้นตอน 3: เขียนโค้ดให้หุ่นยนต์ทำงานให้สำเร็จ
- ใช้เส้นทางที่คุณวางแผนไว้จากขั้นตอนที่ 2 เพื่อเขียนโค้ดให้หุ่นยนต์เคลื่อนที่ผ่านอุปสรรคทั้งสามได้เร็วที่สุด
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: ใช้เครื่องวัดมุมหุ่นยนต์ และไม้บรรทัด เพื่อช่วยคุณเริ่มต้นกำหนดพารามิเตอร์มุมและระยะทางของคุณ
ขั้นตอน 4: ใช้กระบวนการ Predict-Drive-Measure-Code เพื่อปรับปรุงความเร็วของหุ่นยนต์ของคุณขณะเคลื่อนที่ไปรอบ ๆ ถังทั้งสอง:
- ทำนาย
- เลือกมุมใดมุมหนึ่งเพื่อปรับเล็กน้อยเพื่อปรับปรุงความเร็วของหุ่นยนต์ของคุณ ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงมุมโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- เราคิดว่ามุมควรอยู่ที่ประมาณ ____________ องศา
- เลือกมุมใดมุมหนึ่งเพื่อปรับเล็กน้อยเพื่อปรับปรุงความเร็วของหุ่นยนต์ของคุณ ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงมุมโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- ไดรฟ์
- ทดสอบการทำนายของคุณโดยขับเคลื่อนหุ่นยนต์ตามมุมที่คุณทำนายไว้ หากรู้สึกว่าไม่ถูกต้อง คุณคิดว่าจะต้องเปลี่ยนแปลงอะไรบ้างเพื่อให้มันแม่นยำยิ่งขึ้น? ถ้าไม่อย่างนั้นแล้วรู้สึกยังไงถึงจะดี?
- วัด
- วางหุ่นยนต์วัดมุมของคุณไว้ใต้หุ่นยนต์ จริงๆ แล้วคุณขับหุ่นยนต์ด้วยมุมไหน?
- รหัส
- ใช้มุมมองใหม่ของคุณในโครงการการเขียนโค้ดของคุณ! ปรับแต่งโครงการของคุณแล้วรันเพื่อทดสอบ ความแม่นยำของมุมใหม่ช่วยเพิ่มความเร็วของหุ่นยนต์ของคุณหรือไม่ หากไม่เป็นเช่นนั้น ให้ใช้หุ่นยนต์วัดมุมเพื่อช่วยเปลี่ยนมุมและลองอีกครั้ง อย่าลืมบันทึกการวัดมุมและการสังเกตของคุณลงในสมุดบันทึกขณะที่คุณดำเนินการ
ทรัพยากรสำหรับการปฏิบัติ:
บทความที่เชื่อมโยงที่นี่สามารถใช้ได้ในกรณีที่คุณต้องการความช่วยเหลือเพิ่มเติมในระหว่างการดำเนินกิจกรรม
ตอนนี้คุณได้ดูและอภิปรายวิดีโอแล้ว ก็ถึงคราวของคุณที่จะฝึกฝนแล้ว!
ขั้นตอนที่ 1: ตั้งค่าฟิลด์ตามที่แสดงด้านล่าง
ขั้นตอน 2: สร้างแบบจำลองการเคลื่อนไหวของหุ่นยนต์ที่จำเป็นในการทำงานให้สำเร็จโดยใช้โหมดขับเคลื่อน
- ภารกิจของคุณคือขับหุ่นยนต์ไปรอบ ๆ สิ่งกีดขวางทั้งสามให้ได้เร็วที่สุดเท่าที่จะทำได้ บันทึกการขับขี่ของคุณ จากนั้นวางแผนว่าจะเข้ารหัสการเคลื่อนไหวนั้นอย่างไร
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: พิจารณารายละเอียดที่คุณใช้ในบทเรียนก่อนหน้านี้เพื่อสร้างโครงการการเขียนโค้ดของคุณ ใส่ใจในแต่ละมุมและระยะทางในขณะที่หลีกเลี่ยงสิ่งกีดขวาง และบันทึกการขับขี่ของคุณโดยละเอียดเพื่อสร้างแผนเส้นทางของคุณ
ขั้นตอน 3: เขียนโค้ดให้หุ่นยนต์ทำงานให้สำเร็จ
- ใช้เส้นทางที่คุณวางแผนไว้จากขั้นตอนที่ 2 เพื่อเขียนโค้ดให้หุ่นยนต์เคลื่อนที่ผ่านอุปสรรคทั้งสามได้เร็วที่สุด
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: ใช้เครื่องวัดมุมหุ่นยนต์ และไม้บรรทัด เพื่อช่วยคุณเริ่มต้นกำหนดพารามิเตอร์มุมและระยะทางของคุณ
ขั้นตอน 4: ใช้กระบวนการ Predict-Drive-Measure-Code เพื่อปรับปรุงความเร็วของหุ่นยนต์ของคุณขณะเคลื่อนที่ไปรอบ ๆ ถังทั้งสอง:
- ทำนาย
- เลือกมุมใดมุมหนึ่งเพื่อปรับเล็กน้อยเพื่อปรับปรุงความเร็วของหุ่นยนต์ของคุณ ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงมุมโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- เราคิดว่ามุมควรอยู่ที่ประมาณ ____________ องศา
- เลือกมุมใดมุมหนึ่งเพื่อปรับเล็กน้อยเพื่อปรับปรุงความเร็วของหุ่นยนต์ของคุณ ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงมุมโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- ไดรฟ์
- ทดสอบการทำนายของคุณโดยขับเคลื่อนหุ่นยนต์ตามมุมที่คุณทำนายไว้ หากรู้สึกว่าไม่ถูกต้อง คุณคิดว่าจะต้องเปลี่ยนแปลงอะไรบ้างเพื่อให้มันแม่นยำยิ่งขึ้น? ถ้าไม่อย่างนั้นแล้วรู้สึกยังไงถึงจะดี?
- วัด
- วางหุ่นยนต์วัดมุมของคุณไว้ใต้หุ่นยนต์ จริงๆ แล้วคุณขับหุ่นยนต์ด้วยมุมไหน?
- รหัส
- ใช้มุมมองใหม่ของคุณในโครงการการเขียนโค้ดของคุณ! ปรับแต่งโครงการของคุณแล้วรันเพื่อทดสอบ ความแม่นยำของมุมใหม่ช่วยเพิ่มความเร็วของหุ่นยนต์ของคุณหรือไม่ หากไม่เป็นเช่นนั้น ให้ใช้หุ่นยนต์วัดมุมเพื่อช่วยเปลี่ยนมุมและลองอีกครั้ง อย่าลืมบันทึกการวัดมุมและการสังเกตของคุณลงในสมุดบันทึกขณะที่คุณดำเนินการ
ทรัพยากรสำหรับการปฏิบัติ:
บทความที่เชื่อมโยงที่นี่สามารถใช้ได้ในกรณีที่คุณต้องการความช่วยเหลือเพิ่มเติมในระหว่างการดำเนินกิจกรรม
ความคาดหวังการทำงานกลุ่มเบื้องหน้าในช่วงเริ่มต้น หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับบทบาทสำหรับการทำงานร่วมกันในการเขียนโค้ด ดูบทความนี้เกี่ยวกับการเขียนโปรแกรมแบบคู่ ถามคำถามเช่น:
- กลุ่มของคุณจะเริ่มกิจกรรมนี้อย่างไร?
- คุณจะมั่นใจได้อย่างไรว่าทุกคนมีส่วนร่วมในการขับเคลื่อนและการเขียนโค้ด?
แจกบัตรงานขั้นตอนที่ 2 ให้กับนักเรียนแต่ละคน (Google / .docx / .pdf). โปรดจำไว้ว่าเป้าหมายในการขับเคลื่อนหุ่นยนต์เพื่อทำภารกิจให้สำเร็จคือเพื่อให้นักเรียนพัฒนาแบบจำลองทางกายภาพของภารกิจ จากนั้นพวกเขาจะสร้างแบบจำลองเชิงคำนวณจากนั้นเมื่อเริ่มเขียนโค้ด ให้แน่ใจว่านักเรียนทุกคนใช้เวลาเท่าที่จำเป็นในการขับรถ จัดทำเอกสาร และวางแผนเส้นทางในระหว่างส่วนการขับรถของการฝึกปฏิบัติที่มีคำแนะนำ การสร้างนิสัยที่ดีในการทำภารกิจง่าย ๆ จะช่วยให้เมื่อภารกิจมีความซับซ้อนมากขึ้น
ขณะที่นักเรียนทำการฝึกขับรถเสร็จแล้ว เดินไปรอบๆ ห้องและสอบถามนักเรียนเกี่ยวกับการเรียนรู้ของพวกเขา ถามคำถามเช่น:
- มีอะไรบ้างที่คุณใส่ใจขณะขับรถที่คุณคิดว่าจะช่วยให้คุณเขียนโค้ดได้? ทำไมมันถึงสำคัญกับคุณ?
- ทุกคนขับรถและบันทึกแบบเดียวกันหรือไม่? อะไรที่เหมือนหรือแตกต่าง? คุณจะรวมแนวคิดของคุณให้เป็นแผนร่วมกันได้อย่างไร
แจกบัตรงานขั้นตอนที่ 3 ให้กับนักเรียนแต่ละคนหลังจากที่พวกเขาบรรลุเกณฑ์ความสำเร็จในการขับรถ และแบ่งปันแผนเส้นทางกับคุณ (Google / .docx / .pdf) จากนั้นนักศึกษาจะใช้แผนของตนเป็นพื้นฐานในการสร้างโครงการ VEXcode กระตุ้นให้ผู้เรียนเพิ่มเอกสารการขับขี่ในขณะที่สร้างและทดสอบโครงการของตน เพื่อช่วยให้ระบุกลยุทธ์และรายละเอียดที่เป็นประโยชน์มากที่สุดได้ พวกเขายังสามารถใช้ปุ่มเลิกทำและทำซ้ำเพื่อช่วยเหลือพวกเขาได้ เตือนนักเรียนว่าพวกเขาสามารถกลับมาขับรถได้ทุกเมื่อเพื่อช่วยให้เขียนโค้ดโครงการของตนได้สำเร็จ
นักเรียนควรใช้หุ่นยนต์ Protractor ที่พิมพ์ออกมาในการวางแผนเส้นทางของตน หากนักเรียนไม่มีเครื่องพิมพ์ โปรดพิมพ์เอกสารดังกล่าวให้พวกเขา
ในขณะที่นักเรียนกำลังเขียนโค้ดหุ่นยนต์ ก็เดินไปรอบๆ ห้องและชวนนักเรียนร่วมสนทนาเพื่อเรียนรู้เกี่ยวกับความคืบหน้าและความเข้าใจในการเขียนโค้ดของพวกเขา ถามคำถามเช่น:
- คุณใช้สิ่งที่คุณเรียนรู้ในบทเรียนเพื่อเลือกการวัดมุมของคุณอย่างไร
- คุณคิดว่าความแม่นยำและความเร็วในการเดินทางของหุ่นยนต์มีความสัมพันธ์กันอย่างไร?
- กลุ่มของคุณร่วมมือกันอย่างไรเพื่อบรรลุภารกิจนี้ร่วมกัน?
ขั้นตอน 4 ออกแบบมาเพื่อส่งเสริมการทำซ้ำและการสำรวจของนักเรียนโดยการสลับระหว่างการขับเคลื่อนและการเขียนโค้ดเพื่อปรับปรุงโครงการของพวกเขาและค้นหาแนวทางที่ดีที่สุดสำหรับงาน นักเรียนควรใช้กระบวนการ Predict-Drive-Measure Code เพื่อช่วยปรับปรุงสิ่งหนึ่งเกี่ยวกับการเคลื่อนไหวของหุ่นยนต์ในแต่ละครั้ง โดยเน้นที่การปรับมุมเล็กๆ น้อยๆ เพื่อความแม่นยำ ซึ่งจะช่วยปรับปรุงความเร็วโดยรวมของพวกเขา พวกเขาควรหมุนเวียนกระบวนการซ้ำๆ เพื่อปรับปรุงโครงการของพวกเขา เพื่ออำนวยความสะดวกให้กับกระบวนการนี้ ให้ถามคำถามเช่น:
- ผลการทดสอบของคุณตรงกับที่คุณคาดการณ์ไว้หรือไม่? ต้องปรับเปลี่ยนอะไรบ้าง?
- การคาดเดามุมก่อนขับรถช่วยให้คุณปรับปรุงความแม่นยำของการเคลื่อนไหวของหุ่นยนต์ได้อย่างไร
- การปรับปรุงความแม่นยำของมุมช่วยให้หุ่นยนต์ของคุณเคลื่อนที่ไปรอบๆ ทั้งสามถังได้เร็วขึ้นหรือไม่ คุณรู้ได้ยังไง?
- คุณได้บันทึกอะไรไว้ในวารสารของคุณตลอดกระบวนการนี้บ้าง? คุณสามารถปรับปรุงกระบวนการจัดทำเอกสารของคุณได้อย่างไร?
สรุป
ตอนนี้คุณได้ฝึกฝนแล้ว ก็ถึงเวลาที่จะแบ่งปันสิ่งที่คุณได้เรียนรู้ ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณเพื่อช่วยให้คุณสะท้อนการเรียนรู้ของคุณและเตรียมพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- มีอะไรบ้างที่คุณเรียนรู้ระหว่างขับรถที่ช่วยคุณในการเขียนโค้ด? คุณบันทึกการเรียนรู้ดังกล่าวไว้อย่างไร?
- คุณได้เรียนรู้อะไรบ้างเกี่ยวกับการจัดสรรเวลาให้เหมาะสมที่สุดเพื่อทำภารกิจให้สำเร็จ?
- คุณร่วมมือกับกลุ่มของคุณอย่างไรในการกำหนดการวัดมุมและระยะทางที่ดีที่สุด?
ตอนนี้คุณได้ฝึกฝนแล้ว ก็ถึงเวลาที่จะแบ่งปันสิ่งที่คุณได้เรียนรู้ ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณเพื่อช่วยให้คุณสะท้อนการเรียนรู้ของคุณและเตรียมพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- มีอะไรบ้างที่คุณเรียนรู้ระหว่างขับรถที่ช่วยคุณในการเขียนโค้ด? คุณบันทึกการเรียนรู้ดังกล่าวไว้อย่างไร?
- คุณได้เรียนรู้อะไรบ้างเกี่ยวกับการจัดสรรเวลาให้เหมาะสมที่สุดเพื่อทำภารกิจให้สำเร็จ?
- คุณร่วมมือกับกลุ่มของคุณอย่างไรในการกำหนดการวัดมุมและระยะทางที่ดีที่สุด?
แนะนำให้นักเรียนแบ่งปันการเรียนรู้ของพวกเขาในการอภิปรายทั้งชั้นเรียน คำถามที่นักเรียนตอบไว้ในวารสารของตนเป็นจุดเริ่มต้นของการอภิปราย ถามคำถามติดตามเพื่อชี้แนะให้นักเรียนรวมความคิดของตนเข้าด้วยกันเพื่อสร้างความเข้าใจร่วมกัน ติดตามด้วยคำถามเช่น:
- หากมีคนขอให้คุณอธิบายกลยุทธ์ในการทำภารกิจท้าทายแบบจับเวลา คุณจะตอบว่าอย่างไร
- คุณค้นพบมุมและระยะทางของคุณได้อย่างไร? มีวิธีที่แตกต่างกันบ้างอะไรบ้าง? คุณคิดว่าบทเรียนนี้อาจช่วยคุณก้าวไปข้างหน้าได้อย่างไร?
- ตอนนี้คุณมีความรู้เกี่ยวกับการเขียนโค้ดหุ่นยนต์อะไรบ้างที่คุณไม่เคยรู้มาก่อนที่จะฝึกฝน? คุณมีหลักฐานอะไรมาสนับสนุนเรื่องนี้?
เพิ่มรายการแนวทางการเขียนโค้ด VEXcode ที่แชร์กันจากบทเรียนที่ 2 โดยอิงตามสิ่งที่นักเรียนแชร์กัน สิ่งประดิษฐ์เหล่านี้ควรสะท้อนถึงความเข้าใจปัจจุบันของคลาสในการเขียนโค้ดหุ่นยนต์ของพวกเขา
เลือก ถัดไป > เพื่อไปยังความท้าทายของหน่วย