
![]() صندوق أدوات المعلم
صندوق أدوات المعلم
-
مخطط النشاط
سيعرّف هذا الاستكشاف الطلاب أولاً على كيفية ضبط سرعة القيادة ثم يطلب منهم استكشاف كيفية تأثير سرعة الروبوت على زخمه. انقر هنا (Google / .docx / .pdf) للحصول على الخطوط العريضة لهذا النشاط. سيكون فهم زخم الروبوت مفهومًا مهمًا لتطبيقه على لعبة البولينج Strike Challenge. -
ما سيقوم الطلاب ببرمجته
يتيح استخدام مشروع قالب Speedbot (محرك Drivetrain 2، بدون جيرو) للطلاب تغيير إعدادات سرعة Speedbot ببساطة عن طريق إضافة set_drive_velocity إلى drive_for تعليمات. الجزء الموجه من النشاط يقوم فيه الطلاب بتحريك Speedbot بسرعات مختلفة، وفي نهاية النشاط يطلب منهم تطبيق مهاراتهم في برمجة السرعة لاختبارات الزخم ونقل الطاقة.
Speedbot جاهز للقيادة بسرعات مختلفة!
سيساعدك هذا التحقيق على معرفة المزيد حول برمجة Speedbot للقيادة بالسرعات الأكثر ملاءمة للمهمة. في تحدي الضربة في النهاية، ستحتاج إلى العثور على سرعة لـ Speedbot تسمح له بأن يكون سريعًا ويتمتع بزخم كبير مع الحفاظ على سيطرته من أجل ضرب الكرة بزاوية جيدة وبقوة كبيرة.
![]() صندوق أدوات المعلم
صندوق أدوات المعلم
فيما يلي نظرة عامة على واجهة المستخدم الخاصة بـ VEXcode V5. سيتم تعريف الطلاب بعلامات التبويب/الأزرار هذه أثناء الأنشطة في مختبر Momentum Alley STEM. يتم توفير الروابط أيضًا في جميع أنحاء مختبر العلوم والتكنولوجيا والهندسة والرياضيات (STEM Lab) لتوفير المزيد من المعلومات حول علامات التبويب/الأزرار هذه. 
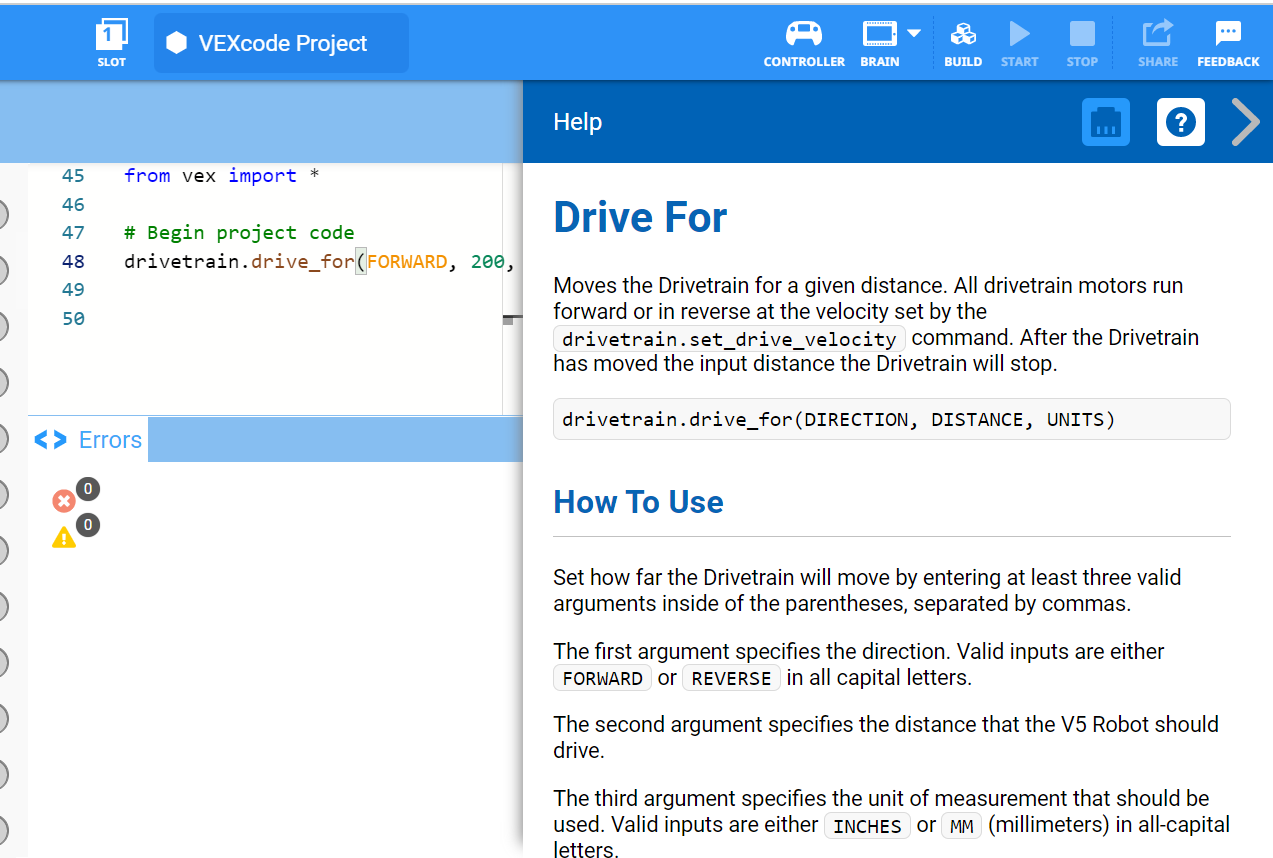
تعليمات VEXcode V5 Python التي سيتم استخدامها في الجزء الأول من هذا التحقيق:
-
drivetrain.set_drive_velocity(50، PERCENT)
-
Drivetrain.drive_for (إلى الأمام، 200، مم)
-
لمعرفة المزيد من المعلومات حول أحد التعليمات، حدد تعليمات، ثم حدد رمز علامة الاستفهام بجوار التعليمات لرؤية المزيد من المعلومات.
تأكد من أن لديك الأجهزة المطلوبة، ودفتر الملاحظات الهندسي الخاص بك، وتنزيل VEXcode V5 وجاهزًا.
![]() نصائح المعلم
نصائح المعلم
إذا كانت هذه هي المرة الأولى التي يستخدم فيها الطالب VEXcode V5، فيمكنه الرجوع إلى البرامج التعليمية في أي وقت أثناء هذا الاستكشاف. توجد البرامج التعليمية في شريط الأدوات. 
يجب أن تحصل كل مجموعة من الطلاب على الأجهزة المطلوبة والدفتر الهندسي الخاص بالمجموعة. ثم افتح VEXcode V5.
| كمية | المواد المطلوبة |
|---|---|
| 1 |
روبوت سبيدبوت |
| 1 |
بطارية الروبوت المشحونة |
| 1 |
فيكس كود V5 |
| 1 |
كابل USB (في حالة استخدام جهاز كمبيوتر) |
| 1 |
دفتر الهندسة |
| 1 |
الكرة (حجم وشكل كرة القدم) |
| 1 |
مساحة فارغة 3م×3م |
| 1 |
عصا القياس أو المسطرة |
| 1 |
لفة من الشريط |
| 1 |
![]() نصائح المعلم
نصائح المعلم
قم بتصميم كل خطوة من خطوات استكشاف الأخطاء وإصلاحها للطلاب.
الخطوة الثانية: ابدأ مشروعًا جديدًا
أكمل الخطوات التالية لبدء المشروع:
-
افتح قائمة "ملف" وحدد "فتح الأمثلة".

-
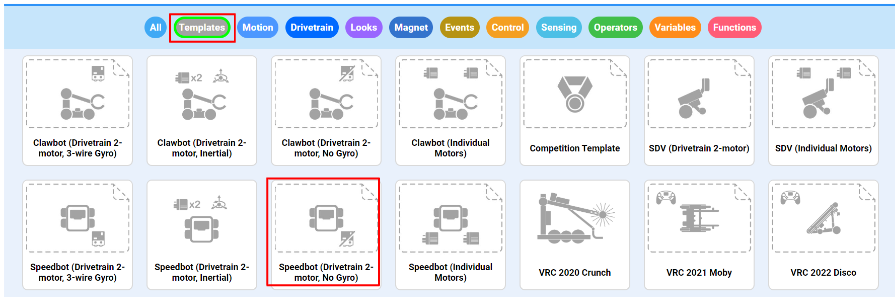
حدد مشروع قالب Speedbot (محرك الدفع ثنائي المحرك، بدون جيرو) وافتحه. يحتوي مشروع القالب على تكوين محرك Speedbot . إذا لم يتم استخدام القالب، فلن يقوم الروبوت الخاص بك بتشغيل المشروع بشكل صحيح.
-
نظرًا لأنك ستعمل على استكشاف السرعة، فسوف تقوم بتسمية مشروعك DriveVelocity. عند الانتهاء، حدد حفظ.
![]() نصائح المعلم
نصائح المعلم
-
يمكن أن تحتوي أسماء المشاريع على مسافات بين الكلمات أو بعدها.

-
يمكنك أن تطلب من الطلاب إضافة الأحرف الأولى من أسمائهم أو اسم مجموعتهم إلى اسم المشروع. سيساعد هذا في التمييز بين المشاريع إذا طلبت من الطلاب إرسالها.
-
نظرًا لأن هذا هو النشاط الأول للبرمجة الذي قد يحاول طلابك القيام به، فيجب عليك وضع نموذج للخطوات، ثم مطالبة الطلاب بإكمال نفس الإجراءات. ويجب على المعلم بعد ذلك مراقبة الطلاب للتأكد من أنهم يتبعون الخطوات بشكل صحيح.
-
تأكد من قيام الطلاب بتحديد "فتح الأمثلة" من القائمة "ملف".
-
تأكد من أن الطلاب قد اختاروا مشروع قالب Speedbot (نظام الدفع ثنائي المحرك، بدون جيرو).
-
يمكنك الإشارة للطلاب إلى وجود العديد من الاختيارات للاختيار من بينها في صفحة الأمثلة. أثناء قيامهم ببناء واستخدام الروبوتات الأخرى، سيكون لديهم فرصة لاستخدام قوالب مختلفة.
- تحقق للتأكد من أن اسم المشروع DriveVelocity موجود الآن في النافذة الموجودة في منتصف شريط الأدوات.

![]() أدوات المعلم
-
إنقاذ المشاريع
أدوات المعلم
-
إنقاذ المشاريع
-
أشر إلى أنه عندما فتحوا VEXcode V5 لأول مرة، كانت النافذة تحمل اسم VEXcode Project. VEXcode Project هو اسم المشروع الافتراضي عند فتح VEXcode V5 لأول مرة. بمجرد إعادة تسمية المشروع إلى Drive وحفظه، تم تحديث الشاشة لإظهار اسم المشروع الجديد. باستخدام هذه النافذة في شريط الأدوات، من السهل التحقق من أن الطلاب يستخدمون المشروع الصحيح.
-
أخبر الطلاب أنهم الآن جاهزون لبدء مشروعهم الأول. اشرح للطلاب أنه من خلال اتباع بعض الخطوات البسيطة، سيتمكنون من إنشاء وتشغيل مشروع من شأنه أن يدفع Speedbot إلى الأمام.
-
ذكّر الطلاب بحفظ مشاريعهم أثناء عملهم. يشرح قسم Python من مكتبة VEX ممارسات الحفظ في VEXcode V5.
![]() أدوات المعلم
-
توقف وناقش
أدوات المعلم
-
توقف وناقش
تعد هذه نقطة جيدة للتوقف مؤقتًا واطلب من الطلاب مراجعة الخطوات التي تم إكمالها للتو عند بدء مشروع جديد في VEXcode V5 بشكل فردي أو في مجموعات. اطلب من الطلاب أن يفكروا بشكل فردي قبل المشاركة داخل مجموعتهم أو مع الفصل بأكمله.
الخطوة 3: قم بالقيادة للأمام لمسافة 150 ملم بسرعات مختلفة
أنت لست مستعدًا لبدء برمجة الروبوت للمضي قدمًا بسرعات مختلفة!
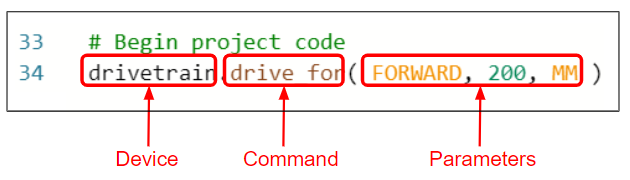
- قبل أن نبدأ البرمجة، علينا أن نفهم ما هي التعليمات. هناك ثلاثة أجزاء للتعليمات.
![]() نصائح المعلم
نصائح المعلم
قد تلاحظ وظيفة الإكمال التلقائي عندما تبدأ في كتابة التعليمات. استخدم مفتاحي "أعلى" و"أسفل" لتحديد الاسم الذي تريده، ثم اضغط على "Tab" أو (Enter/Return) على لوحة المفاتيح لإجراء التحديد. لمزيد من المعلومات حول هذه الميزة راجع مقالة Python . 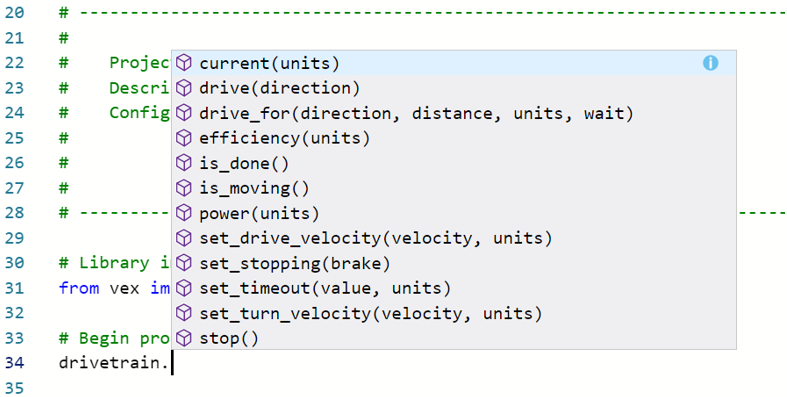
- أضف التعليمات إلى المشروع:
![]() نصائح المعلم
نصائح المعلم
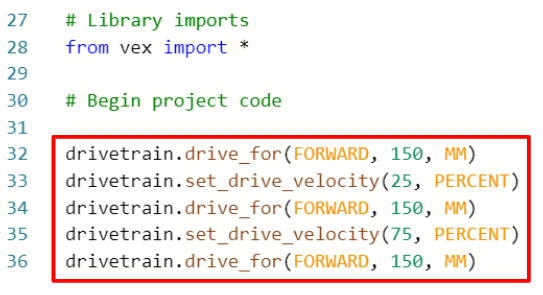
لاحظ أن التعليمات الثانية والثالثة (السطرين 33 و34 في الصورة أعلاه) هي نفس التعليمات الرابعة والخامسة (السطرين 35 و36 أعلاه)، ولكن مع معلمة سرعة مختلفة. بعد إضافة التعليمات الثالثة، يمكن للطلاب تحديد الأسطر المراد تكرارها ونسخها ولصقها لإكمال المشروع. يمكنهم بعد ذلك تغيير السرعة في السطر الرابع إلى 75 بالمائة.
-
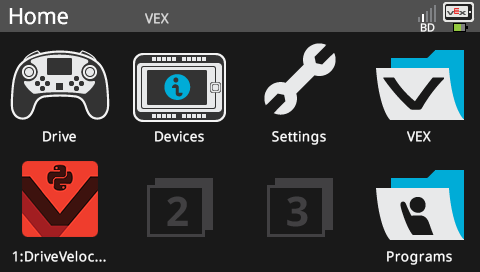
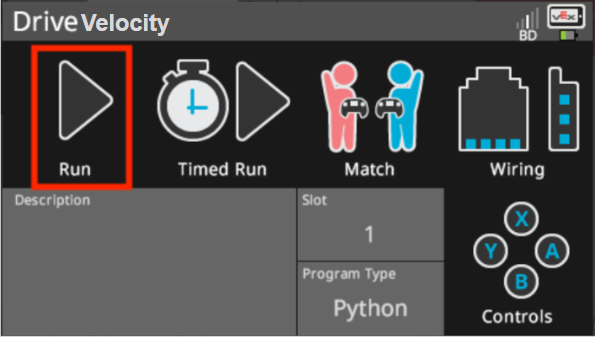
حدد أيقونة الفتحة لاختيار واحدة من الفتحات الثمانية المتوفرة في Robot Brain وحدد الفتحة 1.

-
قم بتوصيل V5 Robot Brain بالكمبيوتر باستخدام كابل USB صغير وقم بتشغيل V5 Robot Brain. يتحول رمز Brain الموجود في شريط الأدوات إلى اللون الأخضر بمجرد إجراء اتصال ناجح.

-
حدد تنزيل لتنزيل المشروع على الدماغ.

![]() صندوق أدوات المعلم
صندوق أدوات المعلم
- ذكّر الطلاب بفصل كابل USB عن Robot Brain. قد يؤدي توصيل الروبوت بجهاز كمبيوتر أثناء تشغيل المشروع إلى قيام الروبوت بسحب كابل الاتصال.
-
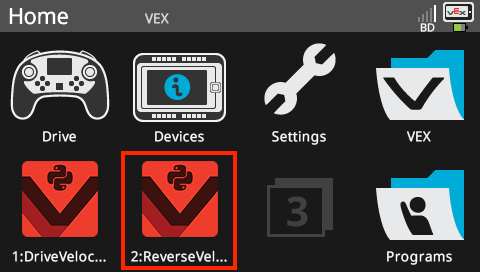
تحقق للتأكد من تنزيل مشروعك (Python) من خلال النظر إلى شاشة Robot Brain. يجب إدراج اسم المشروع DriveVelocity في الفتحة 1.
![]() صندوق أدوات المعلم
صندوق أدوات المعلم
-
توقف وناقش
اطلب من الطلاب التنبؤ بما يعتقدون أنه سيحدث عند تنزيل هذا المشروع وتشغيله على روبوت Speedbot. اطلب من الطلاب أن يسجلوا توقعاتهم في دفاتر ملاحظاتهم الهندسية. إذا سمح الوقت، اطلب من كل مجموعة مشاركة تنبؤاتها.يجب أن يتوقع الطلاب أن Speedbot سيتحرك أولاً للأمام بسرعته الافتراضية (50%)، ثم أبطأ (25%) من السرعة الافتراضية، ثم أسرع (75%) من السرعة الافتراضية.
-
النموذج الأول
نموذج يقوم بتشغيل المشروع أمام الفصل قبل أن يحاول جميع الطلاب في وقت واحد. اجمع الطلاب في منطقة واحدة واترك مساحة كافية لتحرك Speedbot إذا تم وضعه على الأرض.أخبر الطلاب أن دورهم قد حان الآن لتشغيل مشروعهم. تأكد من أن لديهم مسارًا واضحًا وأنه لن تصطدم أجهزة Speedbots ببعضها البعض.
-
قم بتشغيل (Python) المشروع على الروبوت من خلال التأكد من تحديد المشروع ثم الضغط على الزر Run الموجود على Robot Brain. تهانينا على إنشاء مشروعك الأول!
الخطوة 4: قم بالقيادة للأمام والخلف لمسافة 150 ملم بسرعات مختلفة
الآن بعد أن قمت ببرمجة الروبوت الخاص بك للتحرك للأمام بسرعات مختلفة، قم ببرمجته للتحرك للأمام وللخلف بسرعات مختلفة.
-
قم بتغيير المعلمة في التعليمات الثانية drive_for لعرض REVERSE.

-
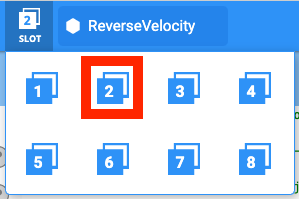
حدد اسم المشروع لتغييره من DriveVelocity إلى ReverseVelocity.

-
حدد أيقونة الفتحة لاختيار فتحة جديدة. حدد الفتحة 2.
-
تحميل (بايثون) المشروع.

-
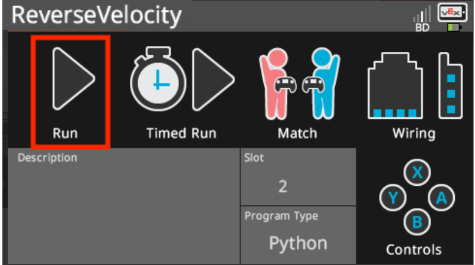
تحقق للتأكد من تنزيل مشروعك (Python) من خلال النظر إلى شاشة Robot Brain. يجب إدراج اسم المشروع ReverseVelocity في الفتحة 2.
-
قم بتشغيل (Python) المشروع على الروبوت من خلال التأكد من تحديد المشروع ثم الضغط على الزر Run الموجود على Robot Brain.
![]() أدوات المعلم
-
إكمال الخطوة 4
أدوات المعلم
-
إكمال الخطوة 4
-
لتغيير الأمر drive_for من للأمام إلى للخلف، ما عليك سوى تغيير المعلمة الأولى إلى REVERSE. سيؤدي هذا إلى تحرك المحركات الموجودة في نظام نقل الحركة في الاتجاه المعاكس.
-
يمكن تغيير عدد المليمتر، لكن في هذا المثال سنتركهم عند 150 ملم كما حددنا في الخطوة السابقة.
-
ذكّر الطلاب بفصل كابل USB عن Robot Brain قبل تشغيل المشروع.
-
ذكّر الطلاب بحفظ مشاريعهم أثناء عملهم. تحتوي مكتبة VEX على قسم لـ Python يشرح ممارسات الحفظ في VEXcode V5.
![]() نصائح المعلم
نصائح المعلم
اطلب من الفرق مشاركة منطقة الاختبار والكرة إذا لزم الأمر، ولكن يمكن أيضًا إعداد مناطق اختبار متعددة تحتوي كل منها على كرتها الخاصة. قرر ما إذا كنت تريد إعداد منطقة (مناطق) الاختبار، أو إذا كنت تريد من الطلاب القيام بذلك.
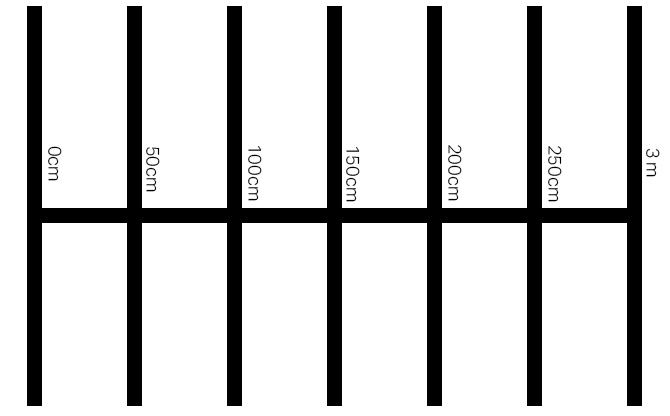
الخطوة 5: إعداد منطقة الاختبار الخاصة بك
-
استخدم شريطًا لاصقًا وعصا مترية لإنشاء خط بطول 3 أمتار على الأرض مثل الخط الأفقي الموضح في الصورة أعلاه.
-
بعد إنشاء الخط، استخدم الشريط وعصا القياس مرة أخرى لإنشاء خط بطول 1 متر عبر خط 3 أمتار مثل الخطوط الرأسية في الصورة أعلاه. قم بربط خط بطول 1 متر عند كل علامة 50 سم على الخط العمودي بالبدء من 0 سم.
-
يجب أن تتمركز الخطوط الأفقية الأقصر على الخط العمودي الأطول.
-
-
أثناء إعداد المنطقة، يجب على واحد أو اثنين من أعضاء فريقك إنشاء مشروع جديد يسمى Momentum. اضبط السرعة على 50% واجعل Speedbot يتقدم للأمام حتى السطر الأول على مسافة 50 سم. ضع في اعتبارك أن 1 سم = 10 مم، وبالتالي سيتحرك الروبوت للأمام لمسافة 50 سم أو 500 مم.
![]() أدوات المعلم
-
لماذا هذا النشاط؟
أدوات المعلم
-
لماذا هذا النشاط؟
-
يعد جمع البيانات وتحليلها، وحتى التعرف البسيط على الأنماط، من المهارات العلمية الأساسية. يضيف هذا النشاط بنية إلى تحليل البيانات عن طريق منع الأخطاء الشائعة.
-
لاحظ أن التعليمات لا تطلب من الطلاب تغيير مسافة قيادة الروبوت مع تغيير سرعة الروبوت. وهذا تطبيق مقصود لما يسميه العلماء بإستراتيجية التحكم في المتغيرات. يعد تعليم الباحثين المبتدئين كيفية التعامل مع متغير واحد في كل مرة (أي السرعة في هذه الحالة) لتحديد تأثيرها على متغير ثانٍ (أي المسافة التي تقطعها الكرة بعد الاصطدام) أمرًا مهمًا لأنه ليس بالضرورة نهجًا سيتبناه الطلاب بشكل عفوي على نهج التخمين والتحقق. غالبًا ما تتعامل أساليب التخمين والتحقق النموذجية مع أكثر من متغير واحد في المرة الواحدة (أي تغيير كل من السرعة والمسافة التي يقطعها الروبوت) ومراقبة تأثير الالتقاء على المسافة التي تقطعها الكرة بعد الدوران. يحاول هذا النشاط إبعاد الطلاب عن ذلك لأن العلاقات بين المتغيرات تصبح غامضة. هل السرعة العالية للروبوت، أم المسافة الأبعد التي يقطعها الروبوت، أم كليهما هي التي تدفع الكرة إلى التحرك لمسافة أبعد؟ لا يمكننا الإجابة على ذلك عندما نتعامل مع كلا المتغيرين في نفس الوقت.
-
ومع ذلك، قد تحاول الفرق بشكل عفوي قيادة الروبوت لمسافات مختلفة. إذا لاحظت ذلك، فاطلب منهم فقط تغيير المسافة مع الحفاظ على السرعة كما كانت في تجربة المسافة الأصلية البالغة 500 مم. وبهذه الطريقة، يمكنهم مقارنة نفس السرعة مع مسافات قيادة مختلفة لمعرفة ما إذا كانت مسافة قيادة الروبوت تؤثر أيضًا في المسافة التي تقطعها الكرة.
الخطوة 6: اختبار نقل الطاقة أثناء الاصطدامات

منطقة اختبار تحدي البولينج بالروبوت والكرة
قم بتوسيط الكرة على الخط الأفقي عند 50 سم ثم ضع الروبوت الخاص بك بحيث يتم توسيط الجزء الأمامي منه على الخط الأفقي عند 0 سم. تأكد من أن الجزء الأمامي من الروبوت يواجه اتجاه الكرة. قم بتشغيل مشروع Momentum الأول الخاص بك والذي تم ضبط السرعة فيه على 50% وانتبه جيدًا عندما يصطدم الروبوت بالكرة.
سجل السرعة المحددة والمسافة المقطوعة والمسافة التي قطعتها الكرة في جدول البيانات هذا (Google / .pdf). لقد تم بدء الصف الأول من الجدول لك بناءً على مشروع Momentum الذي عملت عليه في الخطوة السابقة. استمر في إضافة البيانات إلى هذا الجدول أثناء محاولتك ضبط سرعات مختلفة. يمكنك بعد ذلك إضافة بيانات الفرق الأخرى أثناء مناقشة النتائج التي توصلت إليها كفصل دراسي.
![]() نصائح المعلم
نصائح المعلم
-
قم بإعداد المنطقة لترتد الكرة في اتجاهات مختلفة ولمسافات مختلفة. أغلق الأبواب و/أو النوافذ حسب الحاجة.
-
يمكن حفظ جدول استكشاف السرعة من الأسفل، أو يمكن للطلاب إعادة إنشاء الجدول في دفاتر ملاحظاتهم الهندسية.
-
يمكن العثور على قاعدة تقييم لتقييم دفاتر الملاحظات الهندسية للفريق هنا (Google / .docx / .pdf)، ويمكن العثور على قاعدة تقييم لتقييم دفاتر الملاحظات الفردية هنا (Google / .docx / . قوات الدفاع الشعبي). عندما تخطط لتقييم عمل الطلاب باستخدام قواعد التقييم، تأكد من مشاركة قواعد التقييم معهم قبل أن يبدأوا العمل في المشروع.

فكر في الأسئلة الواردة أدناه في دفتر ملاحظاتك الهندسي وأجب عنها أثناء قيامك بجمع بياناتك:
-
كيف يمكنك معرفة أن زخم الروبوت ينقل الطاقة إلى الكرة أثناء الاصطدام؟ اشرح بالتفاصيل.
-
كرر الاختبار مرتين أخريين على الأقل. حاول أن تكون السرعة أقل من 50%. أعد ضبط الكرة في موضعها وسجل في الجدول المسافة التي قطعتها الكرة. حاول أيضًا أن تكون السرعة أكثر من 50%. أعد ضبط الكرة في موضعها وسجل في الجدول المسافة التي قطعتها الكرة.
-
عندما تنتهي جميع المجموعات من اختباراتها الثلاثة، ناقش السرعات التي اختارتها المجموعات الأخرى والمسافات التي قطعتها الكرة في اختباراتها. أثناء مشاركة الفرق لبياناتها، قم بإضافة النتائج التي توصلوا إليها إلى الجدول الخاص بك.
-
ابحث عن النمط (الأنماط) في البيانات. هل المسافة التي تقطعها الكرة تزيد أم تقل مع زيادة السرعة المتجهة؟
![]() أدوات المعلم
-
الإجابات
أدوات المعلم
-
الإجابات
-
حركة الكرة دليل على أن الروبوت قام بنقل الطاقة أثناء الاصطدام. يمكن للطلاب أيضًا وصف سرعة الكرة بعد الاصطدام أو اتجاه تحركها كدليل.
-
تعتمد المسافة التي تقطعها الكرة على كتلة/وزن الكرة المستخدمة والسرعة المحددة للروبوت.
-
يجب أن يدرك الطلاب أن السرعات الأعلى تقود الكرة إلى التحرك لمسافة أبعد من السرعات المنخفضة. اربط هذا بوضوح بزخم الروبوت. سلط الضوء على أن وزن الروبوت لم يتغير، بل سرعته فقط، ولكن كلاهما يساهم في زخم الروبوت. اسألهم عما إذا كانوا يعتقدون أن الكرة ستنتقل بعيدًا إذا كان الروبوت أثقل. ومن المفترض أن. هناك المزيد عن تأثيرات كتلة الكرة أثناء الاصطدام في القراءة التالية.
-
ربما اختارت مجموعات الطلاب سرعات متغيرة على نطاق واسع ولكن الهدف التعليمي العام هو أن يدرك الطلاب أن السرعات الأعلى تؤدي إلى زخم أكبر ينقل المزيد من الطاقة إلى الكرة أثناء الاصطدامات.