
![]() 教師ツールボックス
教師ツールボックス
-
アクティビティの概要
この探索では、まず生徒に走行速度の設定方法を紹介し、次にロボットの速度が運動量にどのように影響するかを探ってもらいます。 この活動の概要については、こちら(Google / .docx / .pdf)をクリックしてください。 ロボットの運動量を理解することは、ストライク チャレンジ ボウリング ゲームに適用する重要な概念になります。 -
生徒がプログラムするもの
Speedbot (ドライブトレイン 2 モーター、ジャイロなし) テンプレート プロジェクトを使用すると、生徒は set_drive_velocity を drive_for 命令に追加するだけで、Speedbot の速度設定を変更できます。 アクティビティのガイド付き部分では、生徒はスピードボットをさまざまな速度で動かし、アクティビティの最後には、速度をプログラミングするスキルを運動量とエネルギー伝達のテストに適用するように求められます。
Speedbot はさまざまな速度で走行する準備ができています。
この調査は、タスクに最適な速度で走行するように Speedbot をプログラミングする方法について詳しく学ぶのに役立ちます。 最後のストライク チャレンジでは、スピードボットが速く、勢いがありながらも、コントロールを維持し、適切な角度で大きな力でボールを打てる速度を見つける必要があります。
![]() 教師ツールボックス
教師ツールボックス
VEXcode V5 のユーザー インターフェイスの概要を以下に示します。 学生は、Momentum Alley STEM Lab
のアクティビティ中にこれらのタブ/ボタンについて学習します。 これらのタブ/ボタンに関する詳細情報を提供するリンクも STEM ラボ全体に提供されています 
この調査の最初の部分で使用される VEXcode V5 Python 命令:
-
ドライブトレイン.set_drive_velocity(50, パーセント)
-
ドライブトレイン.drive_for(前進, 200, MM)
-
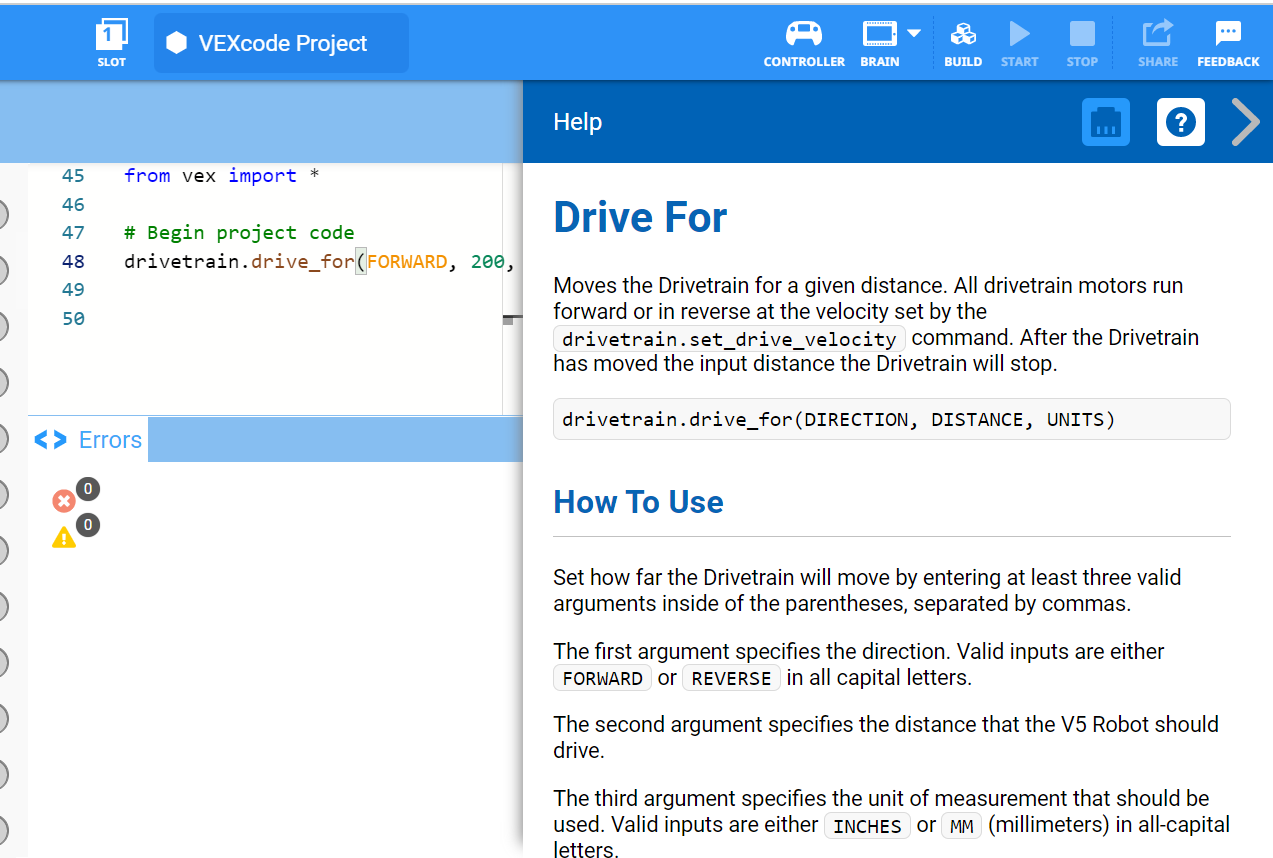
手順の詳細情報を確認するには、「ヘルプ」を選択し、手順の横にある疑問符アイコンを選択して詳細情報を表示します。
必要なハードウェア、エンジニアリング ノートブック、VEXcode V5 ダウンロードされ、準備ができていることを確認してください。
![]() 教師のヒント
教師のヒント
学生が初めて VEXcode V5 を使用する場合は、学習中にいつでもチュートリアルを参照できます。 チュートリアルはツールバーにあります 
各学生グループは、必要なハードウェアとグループのエンジニアリング ノートブックを入手する必要があります。 次に、VEXcode V5 を開きます。
| 量 | 必要な材料 |
|---|---|
| 1 |
スピードボットロボット |
| 1 |
充電されたロボットバッテリー |
| 1 |
VEXコードV5 |
| 1 |
USBケーブル(コンピュータを使用する場合) |
| 1 |
エンジニアリングノートブック |
| 1 |
ボール(サッカーボールの大きさと形) |
| 1 |
3m x 3mの空きスペース |
| 1 |
メートル法または定規 |
| 1 |
テープのロール |
| 1 |
![]() 教師のヒント
教師のヒント
トラブルシューティングの各手順を学生にモデルとして示します。
ステップ2: 新しいプロジェクトを開始する
プロジェクトを開始するには、次の手順を完了してください。
-
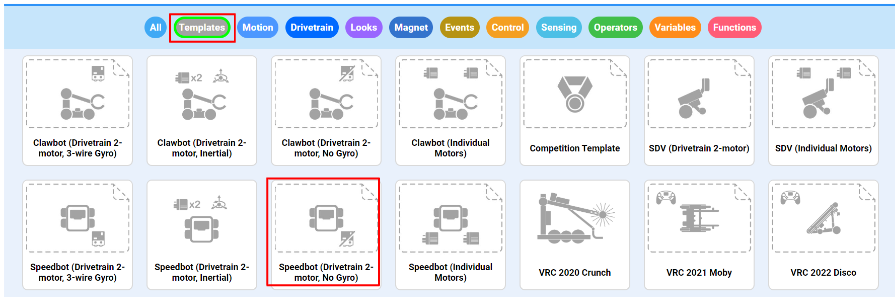
ファイル メニューを開き、例を開くを選択します。

-
Speedbot (ドライブトレイン 2 モーター、ジャイロなし) テンプレート プロジェクトを選択して開きます。 テンプレート プロジェクトには、Speedbot の モーター構成が含まれています。 テンプレートを使用しないと、ロボットはプロジェクトを正しく実行しません。
-
速度の調査に取り組むので、プロジェクトに DriveVelocityという名前を付けます。 完了したら、 保存を選択します。
![]() 教師のヒント
教師のヒント
-
プロジェクト名では、単語の間または単語の後にスペースを入れることができます。

-
生徒にプロジェクト名に自分のイニシャルやグループ名を追加するよう依頼できます。 これは、学生にプロジェクトを提出するよう依頼する場合に、プロジェクトを区別するのに役立ちます。
-
これは生徒が最初に取り組むプログラミングのアクティビティなので、手順をモデル化して示し、生徒に同じアクションを実行するように依頼する必要があります。 次に、教師は生徒が手順を正しく実行しているかどうかを確認するために生徒を監視する必要があります。
-
生徒が「ファイル」メニューから「例を開く」を選択したことを確認します。
-
生徒が Speedbot (ドライブトレイン 2 モーター、ジャイロなし) テンプレート プロジェクトを選択していることを確認します。
-
「例」ページには選択できる選択肢がいくつかあることを生徒に指摘することができます。 他のロボットを組み立てて使用すると、さまざまなテンプレートを使用する機会が得られます。
- プロジェクト名 DriveVelocity がツールバーの中央のウィンドウに表示されていることを確認します。

![]() 教師ツールボックス
-
プロジェクトの保存
教師ツールボックス
-
プロジェクトの保存
-
VEXcode V5 を初めて開いたとき、ウィンドウに VEXcode Project というラベルが付いていたことを指摘します。 VEXcode プロジェクトは、VEXcode V5 を初めて開いたときのデフォルトのプロジェクト名です。 プロジェクトの名前を Drive に変更して保存すると、表示が更新され、新しいプロジェクト名が表示されます。 ツールバーのこのウィンドウを使用すると、生徒が正しいプロジェクトを使用しているかどうかを簡単に確認できます。
-
生徒たちに、最初のプロジェクトを始める準備ができたことを伝えます。 いくつかの簡単な手順に従うだけで、スピードボットを前進させるプロジェクトを作成して実行できることを生徒に説明します。
-
作業中にプロジェクトを保存するように生徒に伝えます。 VEX ライブラリの Python セクションでは、VEXcode V5 での保存方法について説明します。
![]() 教師ツールボックス
-
立ち止まって話し合う
教師ツールボックス
-
立ち止まって話し合う
ここで一旦立ち止まり、生徒に、VEXcode V5 で新しいプロジェクトを開始する際に完了した手順を個別またはグループで確認してもらうとよいでしょう。 グループ内またはクラス全体で共有する前に、生徒に個別に振り返るように依頼します。
ステップ3: 異なる速度で150 mm前進する
ロボットが異なる速度で前進するようにプログラミングを開始する準備ができていません
- プログラミングを始める前に、命令とは何かを理解する必要があります。 命令には3つの部分があります
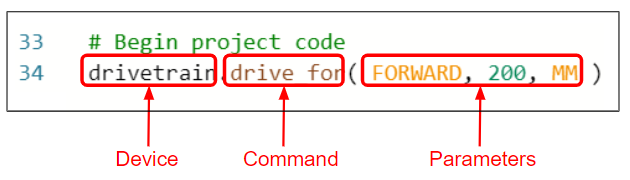
![]() 教師のヒント
教師のヒント
指示を入力し始めると、オートコンプリート機能に気付くかもしれません。 「上」キーと「下」キーを使用して希望の名前を選択し、キーボードの「Tab」キーまたは
(Enter/Return) キーを押して選択します。 この機能の詳細については、 Python の記事をご覧ください。 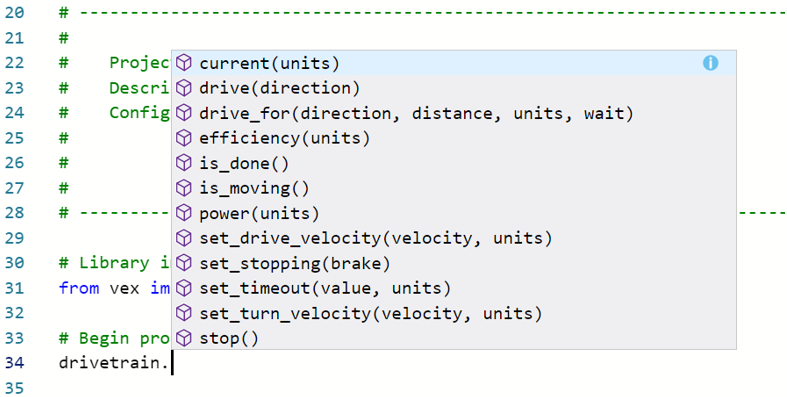
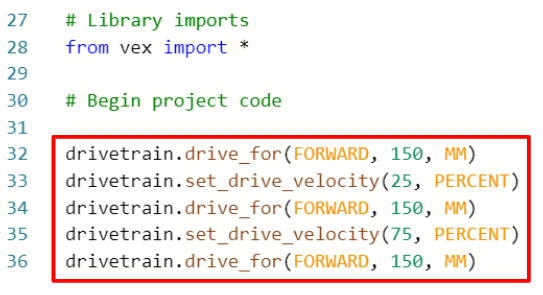
- プロジェクトに指示を追加します:
![]() 教師のヒント
教師のヒント
2 番目と 3 番目の命令 (上の画像の 33 行目と 34 行目) は 4 番目と 5 番目の命令 (上の 35 行目と 36 行目) と同じですが、速度パラメータが異なることに注意してください。 3 番目の指示を追加した後、生徒は繰り返す行を強調表示し、コピーして貼り付けることでプロジェクトを完了できます。 次に、4 行目の速度を 75 パーセントに変更できます



![]() 教師ツールボックス
教師ツールボックス
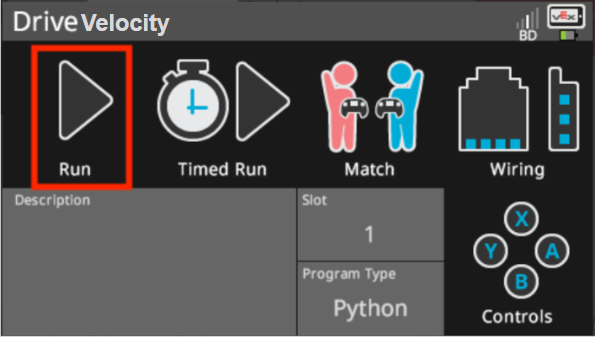
- ロボットブレインから USB ケーブルを取り外すように生徒に伝えます。 プロジェクトの実行中にロボットをコンピューターに接続すると、ロボットが接続ケーブルを引っ張る可能性があります。
-
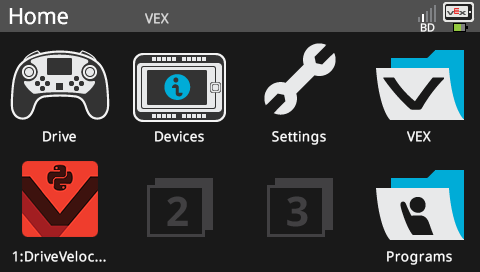
Robot Brain の画面を見て、プロジェクトが ダウンロード (Python) されていることを確認します。 プロジェクト名 DriveVelocity がスロット 1 にリストされている必要があります。
![]() 教師ツールボックス
教師ツールボックス
-
立ち止まって話し合う
このプロジェクトをダウンロードして Speedbot ロボットで実行すると何が起こるかを生徒に予想してもらいます。 学生たちに、エンジニアリングノートに予測を記録するように指示します。 時間が許せば、各グループに予測を共有してもらいます。生徒は、スピードボットが最初にデフォルトの速度 (50%) で前進し、次にデフォルトの速度よりも遅く (25%)、最後にデフォルトの速度よりも速く (75%) 進むと予測する必要があります。
-
最初にモデルを示します
生徒全員に一度に挑戦してもらう前に、クラスの前でプロジェクトを実行するモデルを示します。 生徒を 1 つのエリアに集め、スピードボットを床に置く場合にスピードボットが動けるだけの十分なスペースを残します。今度は生徒たちがプロジェクトを実行する番だと伝えます。 明確な経路があり、スピードボット同士が衝突しないことを確認してください。
-
プロジェクトが選択されていることを確認してから、Robot Brain の て、ロボット上でプロジェクトを実行します (Python) 最初のプロジェクトの作成おめでとうございます!
ステップ4: 異なる速度で150 mm前進および後退する
ロボットが異なる速度で前進するようにプログラムしたので、今度は異なる速度で前進と後進するようにプログラムします。
-
2番目の drive_for 命令のパラメータを変更して、 REVERSEを表示します。

-
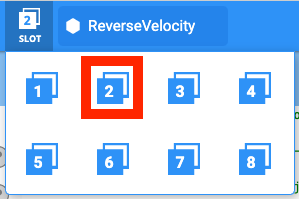
プロジェクト名を選択して、 DriveVelocity から ReverseVelocityに変更します。

-
新しいスロットを選択するには、スロット アイコンを選択します。 スロット2を選択します。
-
(Python) プロジェクトをダウンロードします。

-
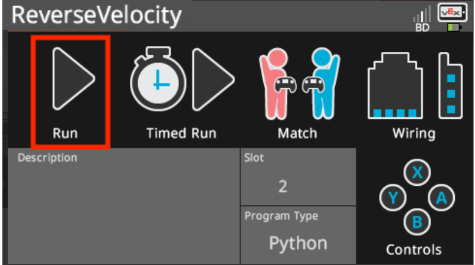
Robot Brain の画面を見て、プロジェクトが ダウンロード (Python) されていることを確認します。 プロジェクト名 ReverseVelocity がスロット 2 にリストされている必要があります。
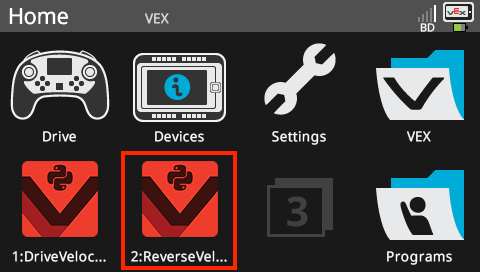
-
プロジェクトが選択されていることを確認してから、Robot Brain の て、ロボット上でプロジェクトを実行します (Python)
![]() 教師ツールボックス
-
ステップ 4 の完了
教師ツールボックス
-
ステップ 4 の完了
-
drive_for コマンドを forward から backwardに変更するには、最初のパラメータを REVERSE に変更するだけです。 これにより、ドライブトレイン内のモーターが反対方向に動きます。
-
mm の数は変更できますが、この例では、前の手順で設定した 150 mm のままにします。
-
プロジェクトを実行する前に、ロボット ブレインから USB ケーブルを取り外すように生徒に伝えます。
-
作業中にプロジェクトを保存するように生徒に伝えます。 VEX ライブラリには、VEXcode V5 での保存方法を説明する Python のセクションがあります。
![]() 教師のヒント
教師のヒント
必要に応じて、チームにテストエリアとボールを共有するように依頼しますが、それぞれ独自のボールを備えた複数のテストエリアを設定することもできます。 テストエリアを設定するか、学生に設定してもらうかを決定します。
ステップ5: テストエリアの設定
-
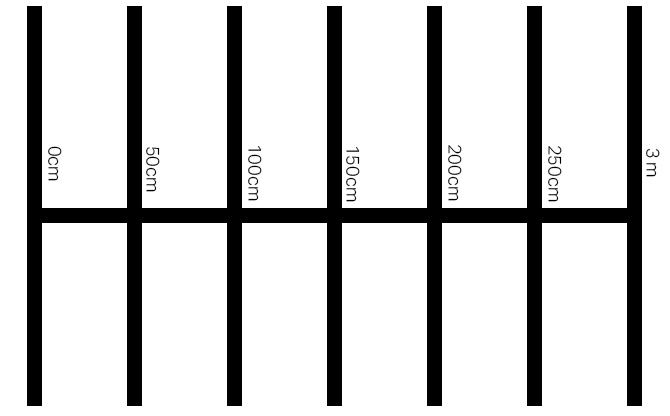
テープとメーター棒を使用して、上の画像に示す水平線のように、床に 3 メートルの線を作成します。
-
線が引かれたら、もう一度テープとメーター棒を使って、上の画像の縦線のように 3 メートルの線に沿って 1 メートルの線を引きます。 0cmから始めて、垂直線の50cmごとに1mの線をテープで貼ります。
-
短い水平線は長い垂直線の中央に配置する必要があります。
-
-
エリアがセットアップされている間に、チームの 1 人または 2 人のメンバーが Momentum という名前の新しいプロジェクトを作成する必要があります。 速度を 50% に設定し、スピードボットを 50 cm の最初のラインまで前進させます。 1 cm = 10 mm であることに留意してください。つまり、ロボットは 50 cm、つまり 500 ミリメートル前進することになります。
![]() 教師用ツールボックス
-
なぜこのアクティビティなのか?
教師用ツールボックス
-
なぜこのアクティビティなのか?
-
データの収集と分析、さらには単純なパターン認識も、科学の基本的なスキルです。 このアクティビティは、よくある失敗を防ぐことで、データ分析に構造を追加します。
-
指示では、ロボットの速度を変えると同時にロボットの走行距離も変えるように生徒に指示していないことに注意してください。 これは、学習科学者が変数制御戦略と呼ぶものを意図的に応用したものです。 初心者の研究者に、一度に 1 つの変数 (この場合は速度) を操作して、それが 2 番目の変数 (衝突後にボールが移動する距離) に与える影響を判断することを教えることは重要です。これは、学生が推測と検証のアプローチよりも自発的に採用するアプローチとは必ずしもならないためです。 典型的な推測と検証のアプローチでは、多くの場合、一度に複数の変数を操作し (つまり、ロボットの速度と移動距離の両方を変更)、回転後にボールが移動する距離に対する合流の影響を観察します。 このアクティビティでは、変数間の関係が曖昧になるため、生徒をその状態から遠ざけようとします。 ボールがより遠くまで飛ぶのは、ロボットの速度が速いからでしょうか、ロボットの走行距離が長いからでしょうか、それともその両方でしょうか? 両方の変数を同時に操作すると、その質問に答えることはできません。
-
ただし、チームは自発的にロボットをさまざまな距離で運転させようとする可能性があります。 このようなことが観察された場合は、距離のみを変更し、速度は元の 500 mm の距離での試験と同じに保つように依頼します。 そうすれば、同じ速度で異なる飛距離を比較して、ロボットの飛距離もボールの飛距離に影響するかどうかを確認できます。
ステップ6: 衝突時のエネルギー伝達のテスト

ロボットとボールを備えたボウリングチャレンジテストエリア
ボールを 50cm の水平線の中心に置き、ロボットの前面が 0cm の水平線の中心にくるように配置します。 ロボットの前面がボールの方向を向いていることを確認してください。 速度を 50% に設定した最初の Momentum プロジェクトを実行し、ロボットがボールと衝突する様子を注意深く観察します。
設定速度、打った距離、ボールが移動した距離をこのデータ テーブル (Google ) に記録します。 表の最初の行は、前の手順で作業した Momentum プロジェクトに基づいて開始されています。 さまざまな速度を設定しながら、この表にデータを追加し続けます。 その後、クラス全体で調査結果を話し合いながら、他のチームのデータを追加できます。
![]() 教師のヒント
教師のヒント
-
ボールがさまざまな方向にさまざまな距離で跳ね返るエリアを準備します。 必要に応じてドアや窓を閉じてください。
-
「速度の調査」の表は以下から保存できます。また、学生はエンジニアリング ノートブックで表を再作成することもできます。
-
チームエンジニアリングノートブックを評価するための基準については、こちら (Google / .docx / .pdf) をご覧ください。また、個々のノートブックを評価するための基準については、こちら (Google / .docx / .pdf) をご覧ください。 学生の作業を評価基準を使用して評価する予定の場合は、学生がプロジェクトに取り組み始める前に必ずその評価基準を学生と共有してください。

データを収集する際に、エンジニアリング ノートブックで以下の質問について考えて回答してください。
-
衝突中にロボットの運動量がボールにエネルギーを伝達したことをどうやって知ることができますか? 詳細に説明してください。
-
テストを少なくともあと 2 回繰り返します。 速度を 50% 未満にしてみてください。 ボールを元の位置に戻し、ボールがどれだけ移動したかを表に記録します。 また、速度を 50% 以上にしてみてください。 ボールを元の位置に戻し、ボールがどれだけ移動したかを表に記録します。
-
すべてのグループが 3 つのテストを完了したら、他のグループが選択した速度と、テストでボールがどれだけ移動したかについて話し合います。 チームがデータを共有するときに、その結果をテーブルに追加します。
-
データ内のパターンを探します。 設定速度が増加すると、ボールが移動する距離は増加しますか、それとも減少しますか?
![]() 教師ツールボックス
-
回答
教師ツールボックス
-
回答
-
ボールの動きは、ロボットが衝突中にエネルギーを伝達した証拠です。 生徒は、証拠として、衝突後のボールの速度や移動方向を説明することもできます。
-
ボールが移動する距離は、使用するボールの質量/重量とロボットに設定された速度によって異なります。
-
生徒は、ボールの速度が速いほど、ボールは遅い場合よりも遠くまで飛ぶことを認識する必要があります。 これをロボットの運動量に明示的に結び付けます。 ロボットの重量は変化しておらず、速度のみが変化しているが、その両方がロボットの運動量に寄与していることを強調します。 ロボットがもっと重かったらボールは同じくらい遠くまで飛ぶと思うか尋ねます。 おそらくそうなるでしょう。 衝突時のボールの質量の影響については、次の記事で詳しく説明します。
-
生徒グループは大きく異なる速度を選択したかもしれませんが、全体的な学習目標は、速度が速いほど運動量が大きくなり、衝突時にボールに伝達されるエネルギーが増えることを生徒に認識させることです。