
![]() Mokytojo įrankių rinkinys
Mokytojo įrankių rinkinys
-
Veiklos metmenys
Šis tyrinėjimas pirmiausia supažindins mokinius su važiavimo greičio nustatymu, o tada paprašys ištirti, kaip roboto greitis veikia jo pagreitį. Spustelėkite čia (Google / .docx / .pdf), kad pamatytumėte šios veiklos planą. Roboto impulso supratimas bus svarbi koncepcija, kurią reikia pritaikyti „Strike Challenge“ boulingo žaidime. -
Ką mokiniai programuos
Naudodami Speedbot (2 variklis, 2 variklis, be giroskopo) šablono projektą mokiniai gali pakeisti Speedbot greičio nustatymus tiesiog pridedant set_drive_velocity prie drive_for. instrukcija. Vadovaujamoje veiklos dalyje mokiniai judina „Speedbot“ skirtingu greičiu, o užsiėmimo pabaigoje jų prašoma pritaikyti greičio programavimo įgūdžius atliekant impulso ir energijos perdavimo testus.
„Speedbot“ yra pasirengęs važiuoti skirtingu greičiu!
Šis tyrimas padės jums sužinoti daugiau apie „Speedbot“ programavimą, kad jis važiuotų tokiu greičiu, kuris geriausiai tinka užduočiai. „Strike Challenge“ pabaigoje turėsite rasti „Speedbot“ greitį, kuris leistų jam būti greitam ir turėti didelį pagreitį, tačiau išlikti valdomas, kad kamuoliuką pataikytumėte geru kampu ir didele jėga.
![]() Mokytojo įrankių rinkinys
Mokytojo įrankių rinkinys
Čia yra VEXcode V5 vartotojo sąsajos apžvalga. Mokiniai bus supažindinti su šiais skirtukais / mygtukais per veiklą šioje Momentum Alley STEM laboratorijoje. Visoje STEM laboratorijoje taip pat pateikiamos nuorodos, kuriose pateikiama daugiau informacijos apie šiuos skirtukus / mygtukus. 
VEXcode V5 Python instrukcijos, kurios bus naudojamos pirmoje šio tyrimo dalyje:
-
drivetrain.set_drive_velocity(50, PERCENT)
-
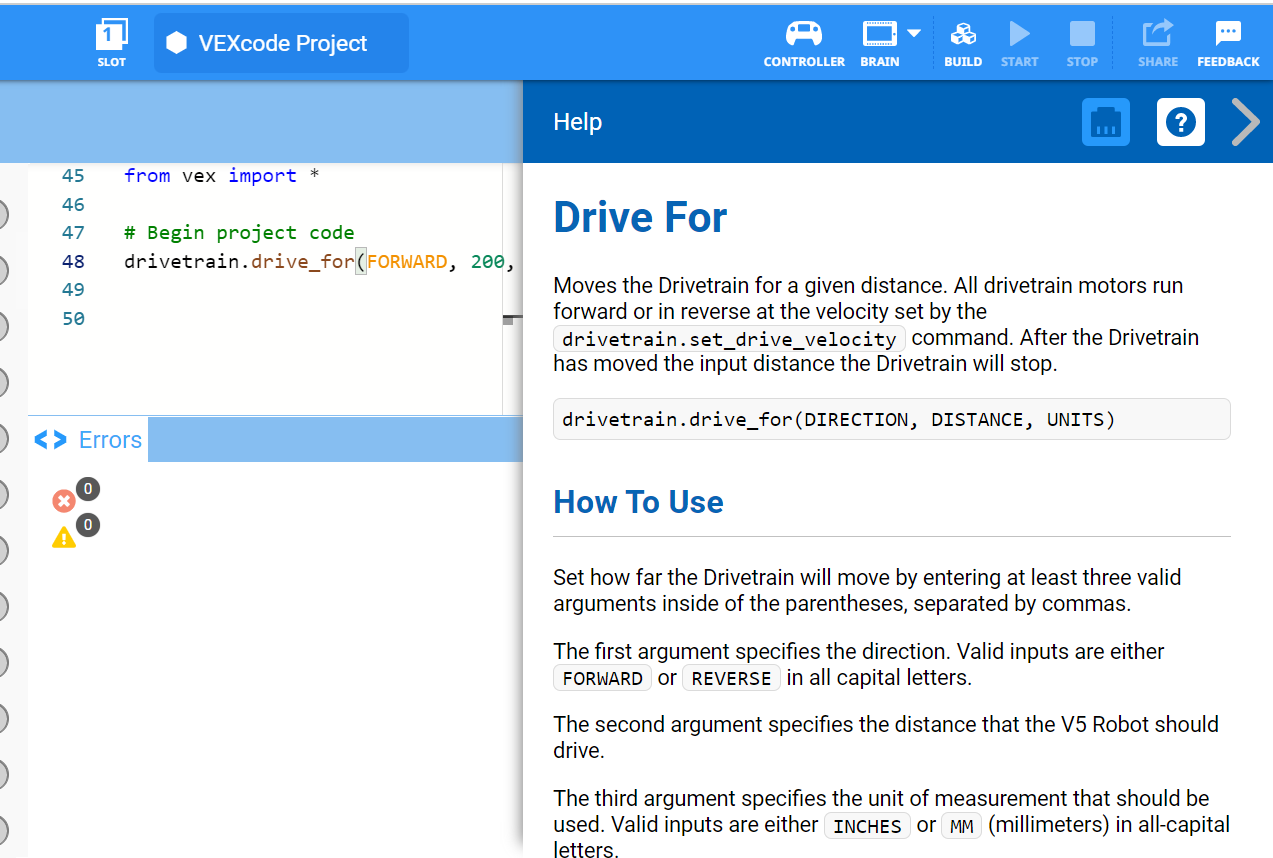
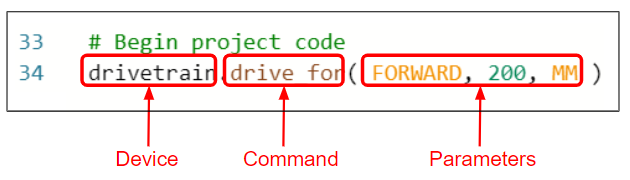
drivetrain.drive_for(FORWARD, 200, MM)
-
Norėdami sužinoti daugiau informacijos apie instrukcijas, pasirinkite Žinynas, tada pasirinkite klaustuko piktogramą šalia instrukcijos, kad pamatytumėte daugiau informacijos.
Įsitikinkite, kad turite reikiamą techninę įrangą, inžinerinį nešiojamąjį kompiuterį ir VEXcode V5 atsisiųstą ir paruoštą.
![]() Mokytojo patarimai
Mokytojo patarimai
Jei mokinys pirmą kartą naudoja VEXcode V5, bet kuriuo šio tyrinėjimo metu jis gali peržiūrėti mokymo programas. Mokymai yra įrankių juostoje. 
Kiekviena studentų grupė turėtų gauti reikiamą techninę įrangą ir grupės inžinerinį sąsiuvinį. Tada atidarykite VEXcode V5.
| Kiekis | Reikalingos medžiagos |
|---|---|
| 1 |
„Speedbot“ robotas |
| 1 |
Įkrauta roboto baterija |
| 1 |
VEXkodas V5 |
| 1 |
USB kabelis (jei naudojate kompiuterį) |
| 1 |
Inžinerijos sąsiuvinis |
| 1 |
Kamuolys (futbolo kamuolio dydis ir forma) |
| 1 |
3m x 3m laisva erdvė |
| 1 |
Matuoklis arba liniuotė |
| 1 |
Juostos ritinys |
| 1 |
![]() Mokytojo patarimai
Mokytojo patarimai
Sumodeliuokite kiekvieną trikčių šalinimo veiksmą mokiniams.
2 veiksmas: pradėkite naują projektą
Norėdami pradėti projektą, atlikite šiuos veiksmus:
-
Atidarykite meniu Failas ir pasirinkite Atidaryti pavyzdžius.

-
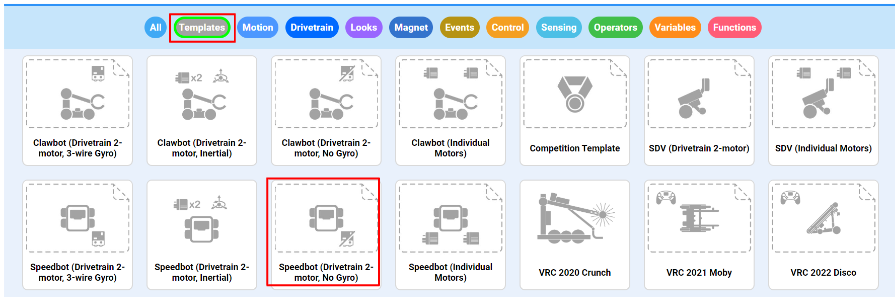
Pasirinkite ir atidarykite „Speedbot“ („Drivetrain 2-motor, No Gyro“) šablono projektą. Šablono projekte yra „Speedbot“ variklio konfigūracija. Jei šablonas nenaudojamas, jūsų robotas netinkamai vykdys projektą.
-
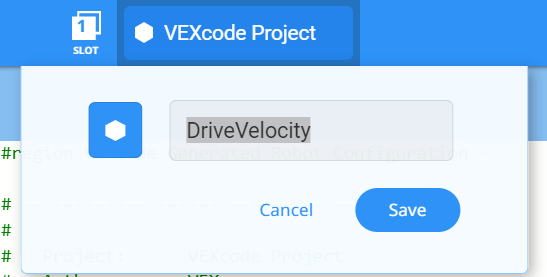
Kadangi dirbsite tyrinėdami greitį, savo projektą pavadinsite DriveVelocity. Baigę pasirinkite Išsaugoti.
![]() Mokytojo patarimai
Mokytojo patarimai
-
Projektų pavadinimuose gali būti tarpų tarp žodžių arba po jų.

-
Galite paprašyti mokinių prie projekto pavadinimo pridėti savo inicialus arba grupės pavadinimą. Tai padės atskirti projektus, jei paprašysite mokinių juos pateikti.
-
Kadangi tai yra pirmoji programa, kurią gali bandyti jūsų mokiniai, turėtumėte modeliuoti veiksmus ir paprašyti mokinių atlikti tuos pačius veiksmus. Tada mokytojas turėtų stebėti mokinius, kad įsitikintų, jog jie teisingai atlieka veiksmus.
-
Įsitikinkite, kad mokiniai meniu Failas pasirinko Atidaryti pavyzdžius.
-
Įsitikinkite, kad mokiniai pasirinko Speedbot (Drivetrain 2-motor, No Gyro) šablono projektą.
-
Galite atkreipti mokiniams dėmesį, kad puslapyje Pavyzdžiai yra keletas pasirinkimų. Kurdami ir naudodami kitus robotus, jie turės galimybę naudoti skirtingus šablonus.
- Patikrinkite, ar projekto pavadinimas DriveVelocity dabar yra lange įrankių juostos centre.

![]() Mokytojo įrankių rinkinys
Projektų
Mokytojo įrankių rinkinys
Projektų
-
Atkreipkite dėmesį, kad pirmą kartą atidarius VEXcode V5 langas buvo pažymėtas VEXcode Project. VEXcode Project yra numatytasis projekto pavadinimas, kai pirmą kartą atidaromas VEXcode V5. Kai projektas buvo pervadintas į Diską ir buvo išsaugotas, ekranas buvo atnaujintas, kad būtų rodomas naujas projekto pavadinimas. Naudojant šį įrankių juostos langą, lengva patikrinti, ar mokiniai naudoja tinkamą projektą.
-
Pasakykite mokiniams, kad jie dabar yra pasirengę pradėti savo pirmąjį projektą. Paaiškinkite mokiniams, kad atlikę kelis paprastus veiksmus, jie galės sukurti ir vykdyti projektą, kuris pajudins Speedbot į priekį.
-
Priminkite mokiniams išsaugoti savo projektus jiems dirbant. Python skyriuje iš VEX bibliotekos paaiškinama įrašymo praktika VEXcode V5.
![]() Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Tai yra geras taškas pristabdyti ir paprašyti mokinių peržiūrėti žingsnius, kurie ką tik buvo atlikti pradedant naują projektą VEXcode V5 individualiai arba grupėse. Paprašykite mokinių individualiai apmąstyti, prieš pasidalydami savo grupėje arba visai klasei.
3 veiksmas: važiuokite į priekį 150 mm skirtingais greičiais
Jūs nesate pasirengęs pradėti programuoti roboto, kad jis važiuotų į priekį skirtingais greičiais!
- Prieš pradėdami programuoti, turime suprasti, kas yra instrukcija. Instrukcijoje yra trys dalys.
![]() Mokytojo patarimai
Mokytojo patarimai
Pradėdami vesti nurodymą galite pastebėti automatinio užbaigimo funkciją. Mygtukais „aukštyn“ ir „žemyn“ pasirinkite norimą pavadinimą, tada klaviatūroje paspauskite „Tab“ arba (Enter/Return), kad pasirinktumėte. Daugiau informacijos apie šią funkciją rasite straipsnyje Python . 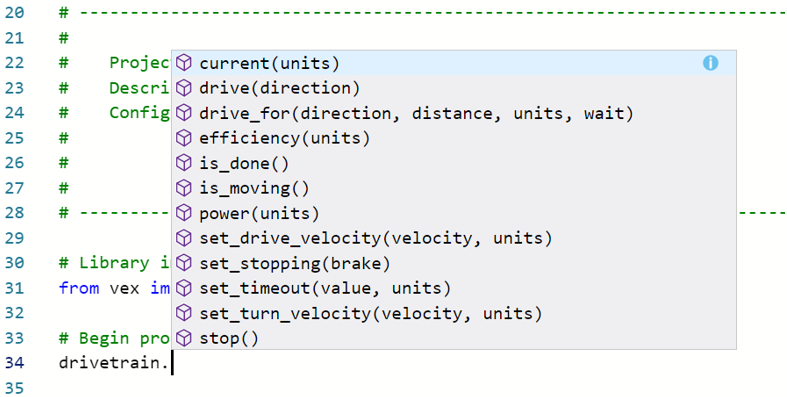
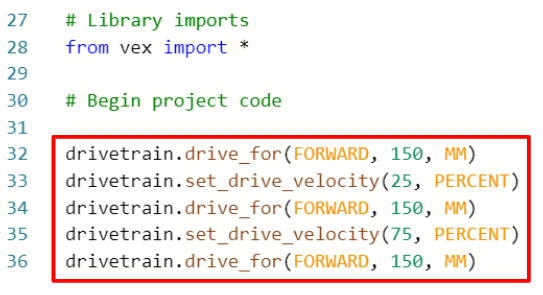
- Pridėkite instrukcijas prie projekto:
![]() Mokytojo patarimai
Mokytojo patarimai
Atkreipkite dėmesį, kad antroji ir trečioji instrukcijos (33 ir 34 eilutės aukščiau esančiame paveikslėlyje) yra tokios pačios kaip ketvirtosios ir penktosios instrukcijos (35 ir 36 eilutės aukščiau), tačiau su skirtingu greičio parametru. Pridėję trečiąsias instrukcijas, mokiniai gali paryškinti eilutes, kurios turi būti kartojamos, ir jas nukopijuoti bei įklijuoti, kad užbaigtų projektą. Tada jie gali pakeisti greitį ketvirtoje eilutėje iki 75 proc.
-
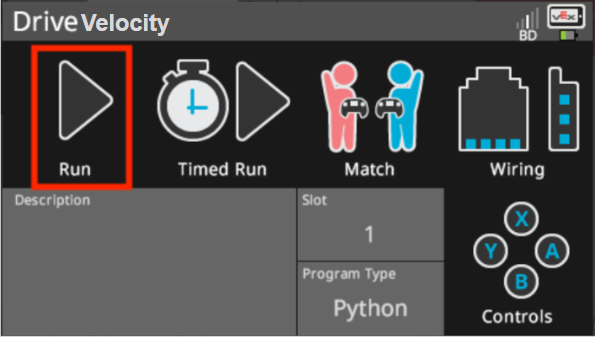
Pasirinkite lizdo piktogramą, kad pasirinktumėte vieną iš aštuonių galimų roboto smegenų lizdų ir pasirinkite 1 lizdą.

-
Prijunkite V5 Robot Brain prie kompiuterio naudodami mikro USB kabelį ir įjunkite V5 Robot Brain. Sėkmingai užmezgus ryšį, įrankių juostoje esanti smegenų piktograma tampa žalia .

-
Pasirinkite Atsisiųsti , kad atsisiųstumėte projektą į smegenis.

![]() Mokytojo įrankių rinkinys
Mokytojo įrankių rinkinys
- Priminkite mokiniams atjungti USB kabelį nuo roboto smegenų. Jei vykdydamas projektą robotas prijungtas prie kompiuterio, jis gali traukti jungiamąjį laidą.
-
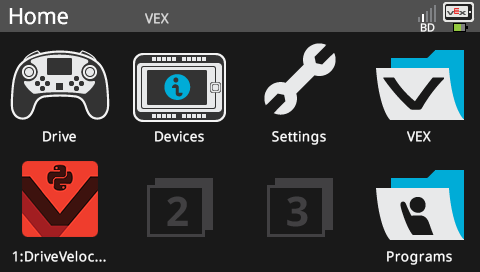
Patikrinkite, ar jūsų projektas atsisiųstas (Python) žiūrėdami į roboto smegenų ekraną. Projekto pavadinimas DriveVelocity turėtų būti nurodytas 1 lizde.
![]() Mokytojo įrankių rinkinys
Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Paprašykite mokinių nuspėti, kas, jų manymu, nutiks, kai šis projektas bus atsiųstas ir paleistas naudojant Speedbot robotą. Pasakykite mokiniams savo prognozes įrašyti į savo inžinerijos sąsiuvinius. Jei laikas leidžia, paprašykite kiekvienos grupės pasidalyti savo prognozėmis.Mokiniai turėtų numatyti, kad „Speedbot“ pirmiausia judės į priekį numatytuoju greičiu (50 %), tada lėčiau (25 %) nei numatytasis greitis, o tada greičiau (75 %) nei numatytasis.
-
Pirmas modelis
Modeliuokite projekto vykdymą prieš klasę, kol visi mokiniai bando iš karto. Surinkite mokinius vienoje srityje ir palikite pakankamai vietos Speedbot judėti, jei jis pastatytas ant grindų.Pasakykite mokiniams, kad dabar jų eilė vykdyti savo projektą. Įsitikinkite, kad jie turi aiškų kelią ir kad joks „Speedbot“ nesusidurs.
-
Vykdykite (Python) projektą robote, įsitikindami, kad projektas pasirinktas, tada paspauskite mygtuką Run ant roboto smegenų. Sveikiname sukūrus pirmąjį projektą!
4 veiksmas: Važiuokite pirmyn ir atbuline eiga 150 mm skirtingais greičiais
Dabar, kai užprogramavote savo robotą važiuoti į priekį skirtingais greičiais, užprogramuokite jį taip, kad dabar važiuotų į priekį ir atbuline eiga skirtingais greičiais.
-
Pakeiskite parametrą antroje drive_for instrukcijoje, kad būtų rodoma REVERSE.

-
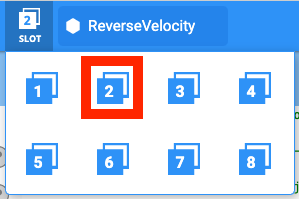
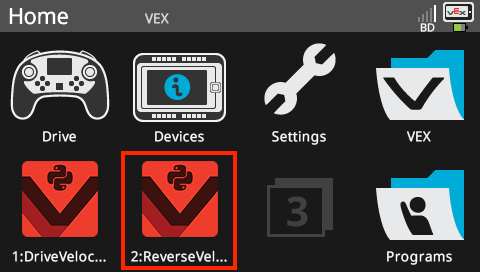
Pasirinkite projekto pavadinimą, kad pakeistumėte jį iš DriveVelocity į ReverseVelocity.

-
Pasirinkite lizdo piktogramą, kad pasirinktumėte naują lizdą. Pasirinkite 2 lizdą.
-
Atsisiųskite (Python) projektą.

-
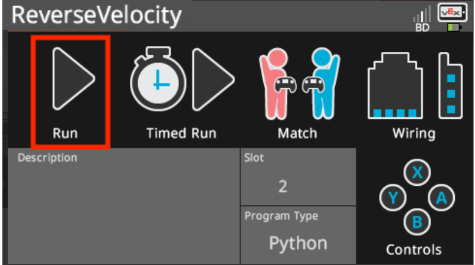
Patikrinkite, ar jūsų projektas atsisiųstas (Python) žiūrėdami į roboto smegenų ekraną. Projekto pavadinimas ReverseVelocity turėtų būti nurodytas 2 lizde.
-
Vykdykite (Python) projektą robote, įsitikindami, kad projektas pasirinktas, tada paspauskite mygtuką Run ant roboto smegenų.
![]() Mokytojo įrankių rinkinys
veiksmo užbaigimas
Mokytojo įrankių rinkinys
veiksmo užbaigimas
-
Norėdami pakeisti komandą drive_for iš į priekį į atgal, tiesiog pakeiskite pirmąjį parametrą į REVERSE. Dėl to pavaros varikliai judės priešinga kryptimi.
-
mm skaičių galima keisti, tačiau šiame pavyzdyje paliksime juos 150 mm, kaip nustatyta ankstesniame žingsnyje.
-
Priminkite mokiniams, kad prieš vykdydami projektą atjunkite USB kabelį nuo roboto smegenų.
-
Priminkite mokiniams išsaugoti savo projektus jiems dirbant. VEX bibliotekoje yra skyrius Python , kuriame paaiškinama įrašymo praktika VEXcode V5.
![]() Mokytojo patarimai
Mokytojo patarimai
Jei reikia, paprašykite komandų pasidalinti bandymo zona ir kamuoliu, tačiau taip pat gali būti įrengtos kelios bandymų zonos, kiekviena su savo kamuoliuku. Nuspręskite, ar norite nustatyti testavimo sritį (-es), ar norite, kad tai padarytų mokiniai.
5 veiksmas: testavimo zonos nustatymas
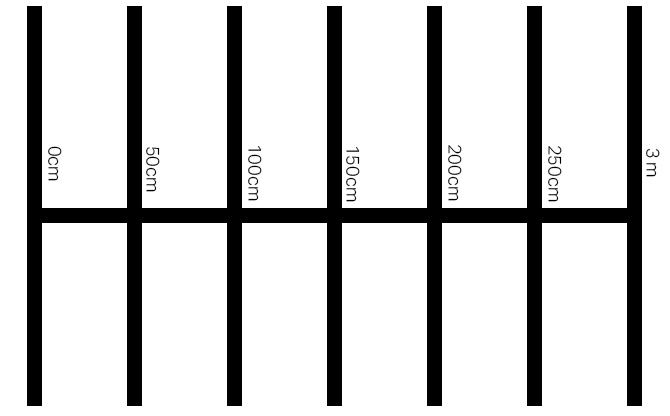
-
Naudokite juostą ir matuoklį, kad ant grindų sukurtumėte 3 m liniją, panašią į horizontalią liniją, parodytą aukščiau esančiame paveikslėlyje.
-
Sukūrę liniją, dar kartą naudokite juostą ir matuoklio lazdelę, kad per 3 m liniją sukurtumėte 1 m linijas, tokias kaip vertikalios linijos aukščiau esančiame paveikslėlyje. Užklijuokite 1 m liniją ties kiekviena 50 cm žyma ant vertikalios linijos, pradedant nuo 0 cm.
-
Trumpesnės horizontalios linijos turėtų būti nukreiptos į ilgesnę vertikalią liniją.
-
-
Kol kuriama sritis, vienas ar du jūsų komandos nariai turėtų sukurti naują projektą pavadinimu „Momentum“. Nustatykite 50 % greitį ir leiskite Speedbot važiuoti pirmyn iki pirmosios linijos 50 cm. Turėkite omenyje 1 cm = 10 mm, todėl robotas pajudės į priekį 50 cm arba 500 milimetrų.
![]() Mokytojo įrankių rinkinys
-
Kodėl ši veikla?
Mokytojo įrankių rinkinys
-
Kodėl ši veikla?
-
Duomenų rinkimas ir analizė, net paprastas modelio atpažinimas, yra pagrindiniai mokslo įgūdžiai. Ši veikla prideda duomenų analizės struktūros, užkertant kelią įprastoms klaidoms.
-
Atkreipkite dėmesį, kad instrukcijos nesako mokiniams keisti roboto važiavimo atstumo ir roboto greičio. Tai sąmoningas taikymas to, ką besimokantys mokslininkai vadina kintamųjų kontrolės strategija. Mokyti pradedančiuosius tyrėjus manipuliuoti vienu kintamuoju vienu metu (ty šiuo atveju greičiu), siekiant nustatyti jo įtaką antrajam kintamajam (ty atstumui, kurį rutulys nukeliauja po susidūrimo), yra svarbu, nes tai nebūtinai yra požiūris, kurį studentai pasirinks. spontaniškai taikant spėjimo ir patikrinimo metodą. Įprasti atspėjimo ir patikrinimo metodai dažnai manipuliuoja daugiau nei vienu kintamuoju vienu metu (ty keičiant greitį ir atstumą, kurį nukeliauja robotas) ir stebint santakos poveikį atstumui, kurį rutulys nukeliauja po sukimosi. Šia veikla bandoma nukreipti mokinius nuo to, nes kintamųjų santykiai tada yra dviprasmiški. Ar didesnis roboto greitis, didesnis atstumas, kurį robotas nuvažiuoja, ar abu lemia kamuoliuko judėjimas toliau? Negalime į tai atsakyti, kai vienu metu manipuliuojame abiem kintamaisiais.
-
Tačiau komandos gali spontaniškai pabandyti vairuoti robotą skirtingais atstumais. Jei tai pastebėsite, paprašykite jų pakeisti tik atstumą, bet išlaikyti tokį patį greitį, koks buvo bandant su pradiniu 500 mm atstumu. Tokiu būdu jie gali palyginti tą patį greitį su skirtingais važiavimo atstumais, kad sužinotų, ar roboto važiavimo atstumas taip pat turi įtakos kamuoliuko nukeliauimui.
6 veiksmas: Energijos perdavimo susidūrimų metu patikrinimas

Boulingo išbandymo aikštelė su robotu ir kamuoliu
Centruokite rutulį ant horizontalios linijos 50 cm atstumu ir padėkite savo robotą taip, kad jo priekis būtų horizontalios linijos centre 0 cm atstumu. Įsitikinkite, kad roboto priekis yra nukreiptas į kamuoliuko kryptį. Vykdykite savo pirmąjį „Momentum“ projektą, kurio greitis nustatytas į 50%, ir atidžiai stebėkite, kaip robotas susiduria su kamuoliu.
Įrašykite nustatytą greitį, nuvažiuotą atstumą ir rutulio nuvažiuotą atstumą šioje duomenų lentelėje (Google / .pdf). Pirmoji lentelės eilutė jums buvo paleista remiantis Momentum projektu, su kuriuo dirbote ankstesniame žingsnyje. Toliau įtraukite duomenis į šią lentelę, kai bandote nustatyti skirtingus greičius. Tada galite pridėti kitų komandų duomenis, kai aptariate savo išvadas kaip klasė.
![]() Mokytojo patarimai
Mokytojo patarimai
-
Paruoškite vietą kamuoliuko atšokimui įvairiomis kryptimis įvairiais atstumais. Jei reikia, uždarykite duris ir (arba) langus.
-
Greičio tyrinėjimo lentelę galima išsaugoti iš apačios arba mokiniai gali atkurti lentelę savo inžinerijos sąsiuviniuose.
-
Komandos inžinerinių sąsiuvinių vertinimo rubriką rasite čia (Google / .docx / .pdf), o atskirų sąsiuvinių vertinimo rubriką rasite čia (Google / .docx / . pdf). Kai planuojate įvertinti studentų darbą naudodami rubriką (-as), prieš pradėdami dirbti su projektu būtinai pasidalykite ja su jais.

Rinkdami duomenis pagalvokite apie toliau pateiktus klausimus ir atsakykite į juos savo inžinerijos bloknote:
-
Kaip galite pasakyti, kad susidūrimo metu roboto impulsas perdavė energiją rutuliui? Paaiškinkite su detalėmis.
-
Pakartokite testą dar bent du kartus. Išbandykite greitį, mažesnį nei 50%. Iš naujo nustatykite kamuoliuką į savo padėtį ir įrašykite į lentelę, kiek toli kamuolys nukeliauja. Be to, išbandykite greitį, didesnį nei 50%. Iš naujo nustatykite kamuoliuką į savo padėtį ir įrašykite į lentelę, kiek toli kamuolys nukeliauja.
-
Kai visos grupės atliks tris testus, aptarkite greitį, kurį pasirinko kitos grupės, ir kiek toli rutulys nukeliavo jų bandymuose. Kol komandos dalijasi savo duomenimis, pridėkite savo išvadas į lentelę.
-
Ieškokite duomenų šablono (-ų). Ar rutulio nuvažiuotas atstumas didėja ar mažėja didėjant nustatytam greičiui?
![]() Mokytojo įrankių rinkinys
-
atsakymai
Mokytojo įrankių rinkinys
-
atsakymai
-
Rutulio judėjimas yra įrodymas, kad susidūrimo metu robotas perdavė energiją. Kaip įrodymą mokiniai taip pat gali apibūdinti rutulio greitį po smūgio arba jo judėjimo kryptį.
-
Atstumas, kurį nukeliauja rutulys, priklauso nuo naudojamo rutulio masės/svorio ir robotui nustatyto greičio.
-
Mokiniai turėtų suprasti, kad didesni greičiai verčia rutulį nukeliauti toliau nei mažesni greičiai. Aiškiai susiekite tai su roboto impulsu. Pabrėžkite, kad roboto svoris nepasikeitė, pasikeitė tik jo greitis, bet abu prisideda prie roboto impulso. Paklauskite jų, ar, jų nuomone, kamuolys nukeliautų taip toli, jei robotas būtų sunkesnis. Tikėtina, kad būtų. Daugiau apie rutulio masės poveikį susidūrimo metu rasite kitame svarstyme.
-
Studentų grupės galėjo pasirinkti labai skirtingus greičius, tačiau bendras mokymosi tikslas yra, kad mokiniai suprastų, kad didesnis greitis sukelia didesnį impulsą, kuris susidūrimo metu perduoda daugiau energijos kamuoliukui.