
Speedbot 已準備好以不同的速度行駛!
這項調查將幫助您了解有關對 Speedbot 進行編程以使其以最適合任務的速度行駛的更多資訊。 在最後的擊球挑戰中,您需要為 Speedbot 找到速度,使其能夠快速且具有強大的動力,但仍能保持控制,以便以良好的角度和強大的力量擊球。
![]() 教師工具箱
教師工具箱
以下是 VEXcode V5 使用者介面的概述。 在 Momentum Alley STEM 實驗室的活動中,學生將了解這些選項卡/按鈕。 STEM
實驗室還提供了鏈接,以提供有關這些選項卡/按鈕的更多資訊。 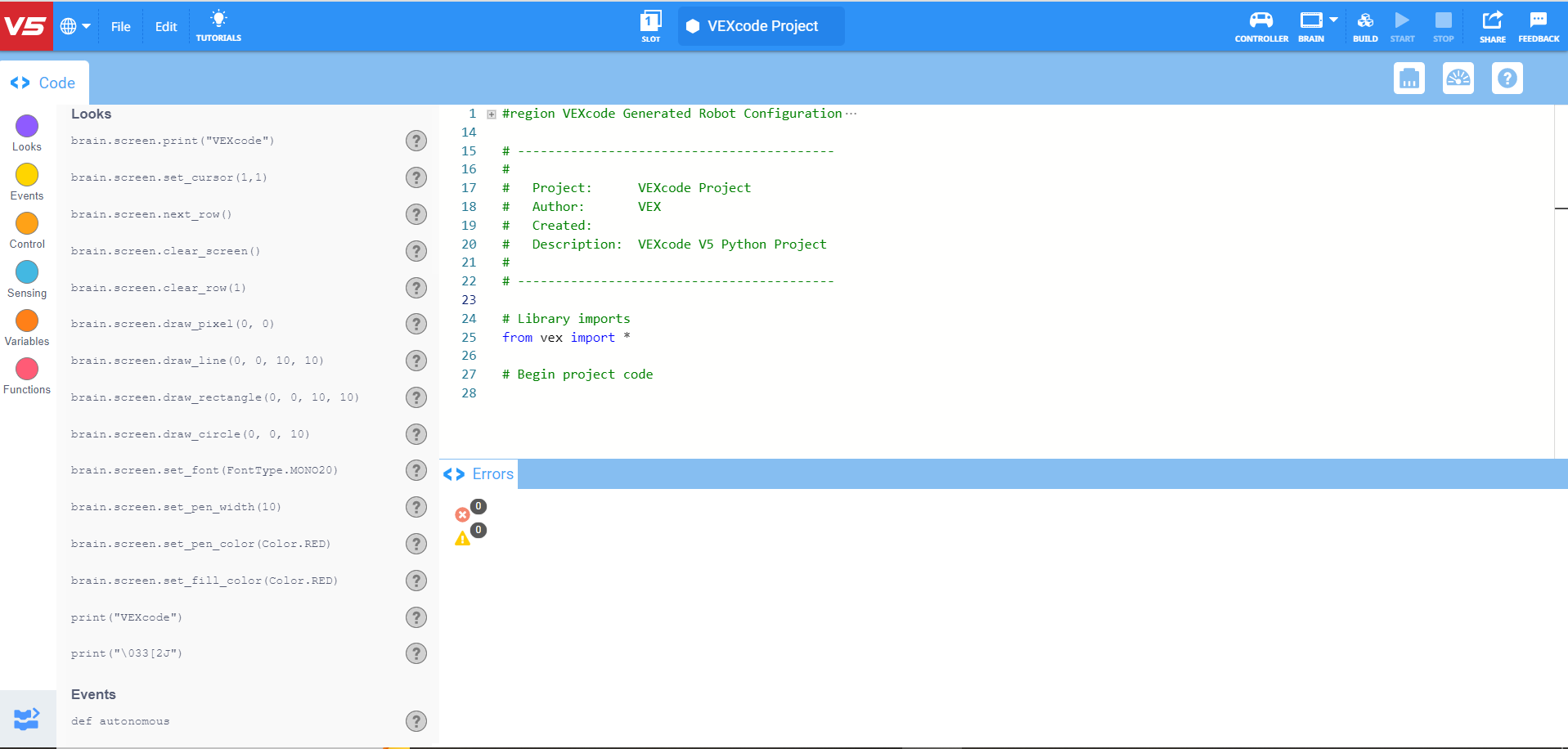
本調查第一部分將使用的 VEXcode V5 Python 指令:
-
傳動系統.set_drive_velocity(50, PERCENT)
-
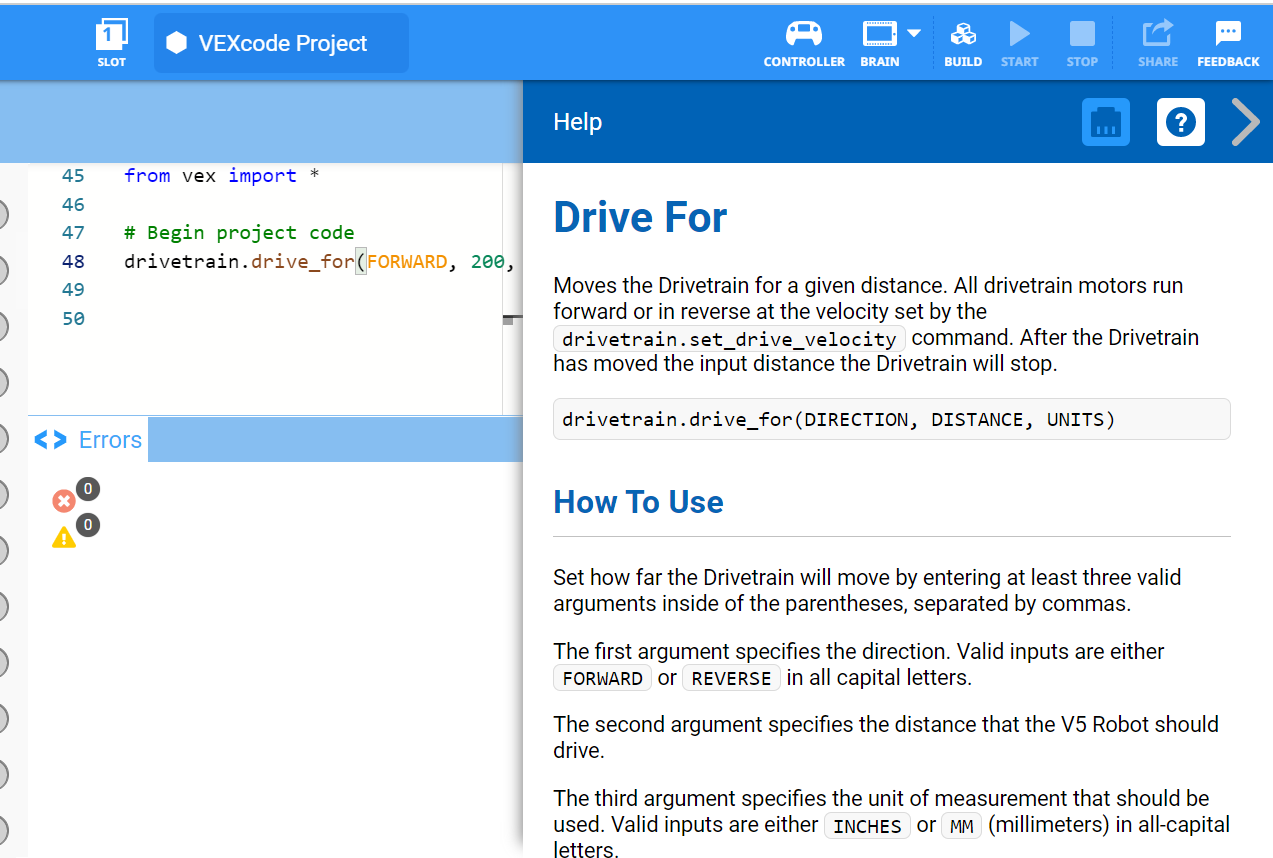
傳動系統.drive_for(FORWARD, 200, MM)
-
要了解有關指令的更多信息,請選擇“幫助”,然後選擇指令旁邊的問號圖示以查看更多信息。
確保您已下載並準備好所需的硬體、工程筆記本和 VEXcode V5 。
![]() 老師提示
老師提示
如果這是學生第一次使用 VEXcode V5,他們可以在探索過程中隨時參考教學。 教學位於工具列中。 
每組學生應獲得所需的硬體和該組的工程筆記本。 然後打開 VEXcode V5。
| 數量 | 所需材料 |
|---|---|
| 1 |
Speedbot機器人 |
| 1 |
充滿電的機器人電池 |
| 1 |
VEXcode V5 |
| 1 |
USB 連接線(如果使用電腦) |
| 1 |
工程筆記本 |
| 1 |
球(足球的大小和形狀) |
| 1 |
3m x 3m 淨空間 |
| 1 |
米尺或尺子 |
| 1 |
膠帶卷 |
| 1 |
![]() 老師提示
老師提示
為學生模擬每個故障排除步驟。
第 2 步:開始一個新項目
完成以下步驟以開始專案:
-
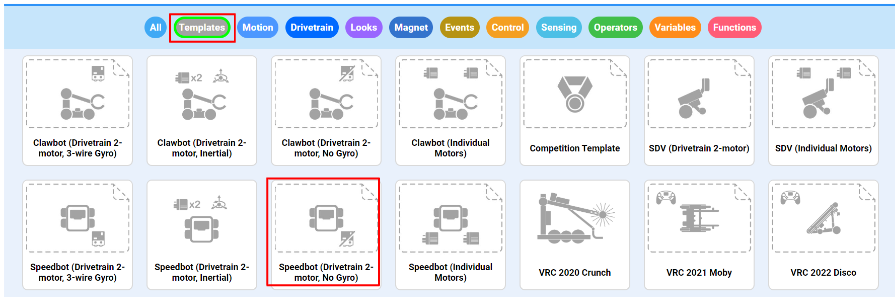
打開文件選單並選擇開啟範例。

-
選擇並開啟 Speedbot(傳動系統 2 電機,無陀螺儀)模板項目。 模板項目包含 Speedbot 的 馬達配置。 如果不使用模板,您的機器人將無法正確運行專案。
-
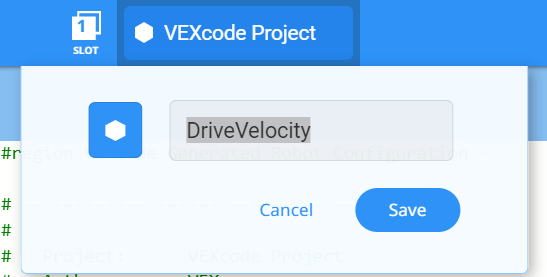
由於您將致力於探索速度,因此您將專案命名為 DriveVelocity。 完成後,選擇 儲存。
![]() 老師提示
老師提示
-
項目名稱的單字之間或之後可以有空格。

-
您可以要求學生將他們的姓名縮寫或小組名稱新增至專案名稱。 如果您要求學生提交項目,這將有助於區分項目。
-
因為這是學生可能嘗試的第一個程式設計活動,所以您應該對步驟進行建模,然後要求學生完成相同的操作。 然後,教師應監督學生,以確保他們正確遵循步驟。
-
確保學生已從“文件”選單中選擇“開啟範例”。
-
確保學生已選擇 Speedbot(傳動系統 2 電機,無陀螺儀)模板項目。
-
您可以向學生指出「範例」頁面上有多個選項可供選擇。 當他們建造和使用其他機器人時,他們將有機會使用不同的模板。
- 檢查並確保項目名稱 DriveVelocity 現在位於工具列中央的視窗中。

![]() 教師工具箱
-
保存項目
教師工具箱
-
保存項目
-
指出當他們第一次打開 VEXcode V5 時,視窗被標記為 VEXcode Project。 VEXcode Project 是首次開啟 VEXcode V5 時的預設專案名稱。 將項目重新命名為 Drive 並儲存後,顯示器將更新以顯示新項目名稱。 使用工具列中的此窗口,可以輕鬆檢查學生是否使用了正確的項目。
-
告訴學生他們現在已經準備好開始他們的第一個專案。 向學生解釋,只需執行幾個簡單的步驟,他們就能夠創建並運行一個項目,推動 Speedbot 向前發展。
-
提醒學生在工作時保存他們的專案。 VEX 庫中的 Python 部分解釋了 VEXcode V5 中的保存實踐。
![]() 教師工具箱
-
停下來討論
教師工具箱
-
停下來討論
這是一個暫停的好時機,讓學生單獨或分組回顧剛剛在 VEXcode V5 中啟動新專案時完成的步驟。 請學生在小組內或全班分享之前先進行單獨反思。
步驟 3:以不同速度向前行駛 150 毫米
您還沒有準備好開始對機器人進行編程以使其以不同的速度向前行駛!
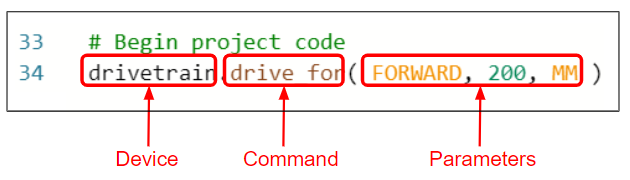
- 在開始程式設計之前,我們需要了解什麼是指令。 指令由三個部分組成。
![]() 老師提示
老師提示
當您開始輸入指令時,您可能會注意到自動完成功能。 使用“向上”和“向下”鍵選擇所需的名稱,然後按鍵盤上的“Tab”或(Enter/Return)進行選擇。
有關此功能的更多信息,請查看 Python 文章。 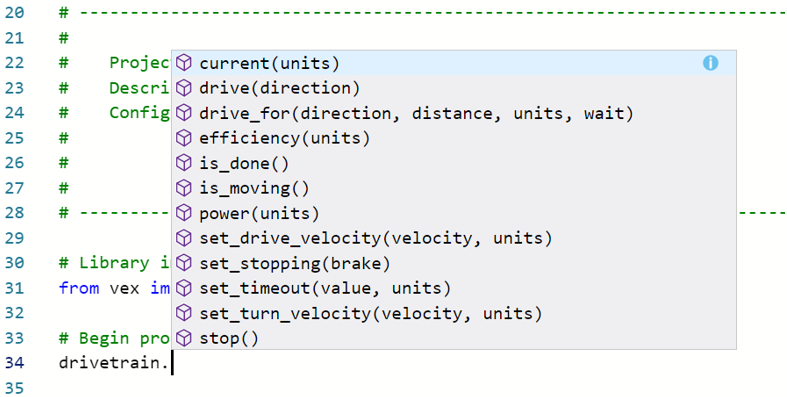
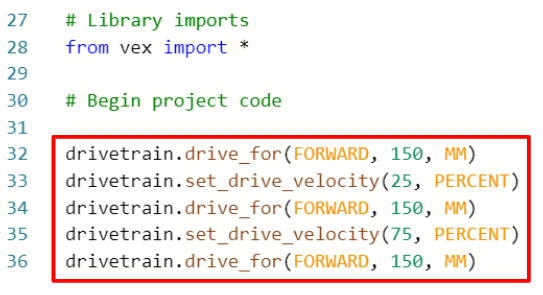
- 將指令加入項目:
![]() 老師提示
老師提示
請注意,第二條和第三條指令(上圖中的第33 行和第34 行)與第四條和第五條指令(上面的第35 行和第36 行)相同,但速度參數不同。 添加第三條指令後,學生可以突出顯示要重複的行並複製並貼上它們以完成專案。 然後他們可以將第四行的速度改為 75%。
-
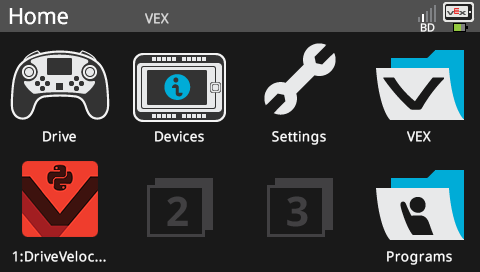
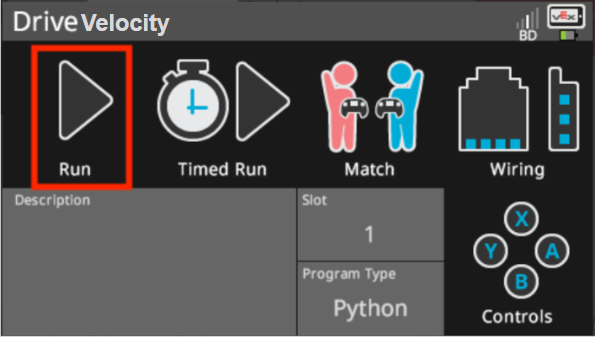
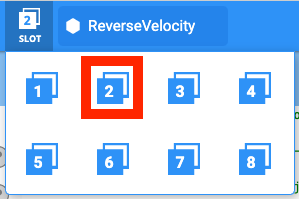
選擇插槽圖示以選擇機器人大腦上的八個可用插槽之一,然後選擇插槽 1。

-
使用微型 USB 線將 V5 機器人大腦連接到計算機,然後打開 V5 機器人大腦的電源。 成功連接後,工具列中的 Brain 圖示 變為綠色 。

-
選擇 下載 將項目下載到 Brain。

![]() 教師工具箱
教師工具箱
- 提醒學生從機器人大腦拔下 USB 線。 在運行專案時將機器人連接到電腦可能會導致機器人拉動連接電纜。
-
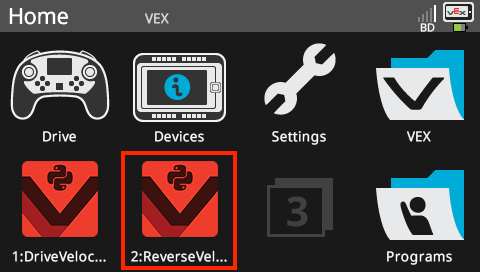
透過查看 Robot Brain 的畫面來檢查以確保您的專案已下載 (Python) 。 項目名稱 DriveVelocity 應列在插槽 1 中。
![]() 教師工具箱
教師工具箱
-
停下來討論
請學生預測當專案下載並在 Speedbot 機器人上運行時他們認為會發生什麼。 告訴學生在工程筆記本上記錄他們的預測。 如果時間允許,請每組分享他們的預測。學生應預測 Speedbot 將首先以其預設速度 (50%) 向前移動,然後比預設速度慢 (25%),然後比預設速度快 (75%)。
-
首先示範
在讓所有學生立即嘗試之前,在全班同學面前示範運行該計畫。 將學生聚集在一個區域,並為 Speedbot 放置在地板上時留出足夠的移動空間。告訴學生現在輪到他們來運行他們的專案了。 確保它們有暢通的路徑,並且速度機器人不會互相碰撞。
-
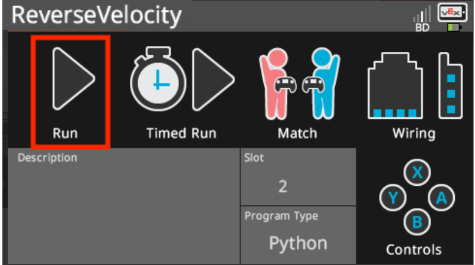
確保選擇項目,然後在機器人大腦上按 Run 按鈕,在機器人上執行 (Python) 項目。 恭喜您創建了您的第一個專案!
步驟 4: 以不同速度向前和向後行駛 150 毫米
現在您已經對機器人進行了編程,使其以不同的速度向前行駛,現在對其進行編程,使其以不同的速度向前和向後行駛。



![]() 教師工具箱
-
完成步驟 4
教師工具箱
-
完成步驟 4
-
若要將 指令從 改為 ,只需將第一個參數變更為 REVERSE 即可。 這將使傳動系統中的馬達沿相反方向移動。
-
毫米數可以更改,但在本例中,我們將按照上一個步驟中的設定將其保留為 150 毫米。
-
提醒學生在運行專案之前斷開機器人大腦的 USB 電纜。
-
提醒學生在工作時保存他們的專案。 VEX 函式庫有一個 Python 部分,解釋了 VEXcode V5 中的保存實務。
![]() 老師提示
老師提示
如有必要,要求各隊共享測試區域和球,但也可以設定多個測試區域,每個測試區域都有自己的球。 決定是否要設定測試區域,或是否希望學生這樣做。
第 5 步:設定測試區域
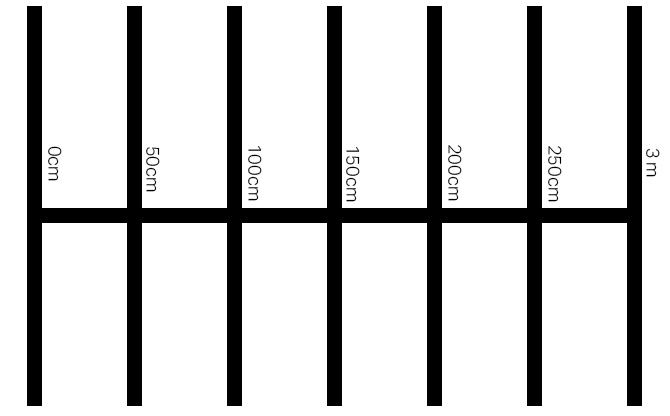
-
使用膠帶和米尺在地板上畫一條 3m 的線,如上圖所示的水平線。
-
建立線條後,再次使用膠帶和儀表尺在 3m 線上方建立 1m 線,如上圖的垂直線。 從 0cm 開始,在垂直線上每隔 50cm 標記一條 1m 的線。
-
較短的水平線應位於較長的垂直線的中心。
-
-
在設定該區域時,團隊中的一兩個成員應建立一個名為 Momentum 的新專案。 將速度設定為 50%,讓 Speedbot 向前行駛到第一條線 50 公分處。 請記住 1 公分 = 10 毫米,因此機器人將向前移動 50 公分或 500 毫米。
![]() 教師工具箱
-
為什麼要進行這項活動?
教師工具箱
-
為什麼要進行這項活動?
-
資料收集和分析,甚至簡單的模式識別,都是基本的科學技能。 此活動透過防止常見失誤來增加資料分析的結構。
-
請注意,說明並沒有告訴學生隨著機器人速度的變化而改變機器人的行駛距離。 這是學習科學家所謂的「變數控制策略」的有意應用。 教導新手調查人員一次操縱一個變數(即本例中的速度)以確定其對第二個變數(即碰撞後球行進的距離)的影響很重要,因為這不一定是學生會採用的方法自發性地通過猜測和檢查的方法。 典型的猜測和檢查方法通常一次操縱多個變數(即,改變機器人行進的速度和距離)並觀察匯合對旋轉後球行進距離的影響。 這項活動試圖引導學生遠離這種情況,因為變數之間的關係是不明確的。 是機器人的速度越高,機器人行駛的距離越遠,還是兩者兼而有之,導致球走得更遠? 當我們同時操縱兩個變數時,我們無法回答這個問題。
-
然而,團隊可能會自發性地嘗試駕駛機器人不同的距離。 如果您觀察到這種情況,請要求他們僅更改距離,但保持速度與原始 500 毫米距離的試驗相同。 這樣,他們就可以比較相同速度和不同的擊球距離,看看機器人的擊球距離是否也會影響球的行進距離。


收集資料時,在工程筆記本中思考並回答以下問題:
-
你如何判斷機器人的動量在碰撞過程中將能量傳遞給了球? 詳細解釋一下。
-
重複測試至少兩次。 嘗試使用低於 50% 的速度。 將球重置到其位置並在表中記錄球行進的距離。 另外,嘗試超過 50% 的速度。 將球重置到其位置並在表中記錄球行進的距離。
-
當所有小組完成三項測試後,討論其他小組選擇的速度以及球在測試中行駛的距離。 當團隊共享數據時,將他們的發現添加到您的表格中。
-
尋找數據中的模式。 隨著設定速度的增加,球行進的距離會增加還是減少?
![]() 教師工具箱
-
答案
教師工具箱
-
答案
-
球的運動證明機器人在碰撞過程中傳遞了能量。 學生也可以描述球撞擊後的速度或其行進方向作為證據。
-
球行進的距離取決於所用球的質量/重量以及為機器人設定的速度。
-
學生應該認識到,較高的速度比較低的速度會導致球移動得更遠。 明確地將其與機器人的動量聯繫起來。 強調機器人的重量沒有改變,只有速度改變,但這兩者都對機器人的動量有貢獻。 詢問他們是否認為如果機器人更重,球會移動那麼遠。 大概會的。 下一篇文章將詳細介紹碰撞過程中球質量的影響。
-
學生小組可能選擇了廣泛變化的速度,但整體學習目標是讓學生認識到較高的速度會產生更大的動量,從而在碰撞過程中將更多的能量傳遞給球。