
![]() Інструменти вчителя
Інструменти вчителя
-
План заняття
Це дослідження спочатку познайомить студентів із встановленням швидкості для водіння, а потім попросить їх дослідити, як швидкість робота впливає на його імпульс. Натисніть тут (Google / .docx / .pdf), щоб переглянути схему цієї діяльності. Розуміння імпульсу робота буде важливою концепцією для застосування в грі в боулінг Strike Challenge. -
Що будуть програмувати учні
Використання шаблону проекту Speedbot (Drivetrain 2-motor, No Gyro) дозволяє учням змінювати налаштування швидкості Speedbot, просто додаючи set_drive_velocity до drive_for інструкція. Під час контрольної частини вправи учні переміщують Speedbot з різними швидкостями, а в кінці вправи їм пропонується застосувати свої навички програмування швидкості для тестування імпульсу та передачі енергії.
Speedbot готовий їздити на різних швидкостях!
Це дослідження допоможе вам дізнатися більше про програмування Speedbot для руху зі швидкістю, яка найкраще підходить для цього завдання. Наприкінці Strike Challenge вам потрібно буде знайти швидкість для Speedbot, яка дозволить йому бути швидким і мати великий імпульс, але зберігати контроль, щоб вдарити по м’ячу під хорошим кутом і з великою силою.
![]() Інструменти вчителя
Інструменти вчителя
Ось огляд інтерфейсу користувача VEXcode V5. Студенти познайомляться з цими вкладками/кнопками під час занять у цій лабораторії STEM на Momentum Alley. Посилання також надаються в STEM Lab, щоб надати більше інформації про ці вкладки/кнопки. 
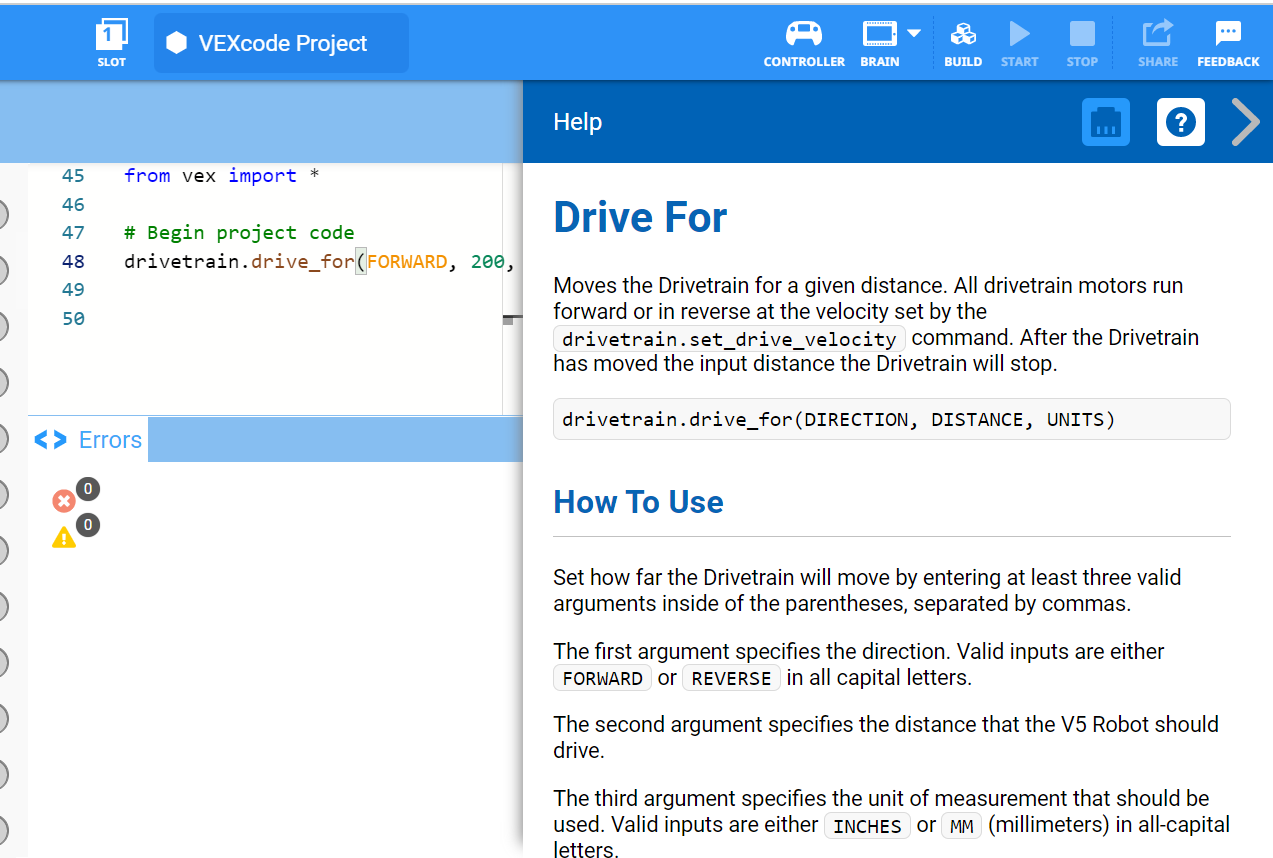
Інструкції VEXcode V5 Python, які використовуватимуться в першій частині цього дослідження:
-
drivetrain.set_drive_velocity(50, PERCENT)
-
drivetrain.drive_for(ВПЕРЕД, 200, ММ)
-
Щоб дізнатися більше про інструкцію, виберіть «Довідка», а потім виберіть піктограму зі знаком питання поруч із інструкцією, щоб переглянути додаткову інформацію.
Переконайтеся, що у вас є необхідне обладнання, ваш інженерний блокнот і VEXcode V5 , завантажені та готові.
![]() Поради вчителю
Поради вчителю
Якщо учень вперше використовує VEXcode V5, він може звернутися до посібників у будь-який час під час цього дослідження. Підручники розташовані на панелі інструментів. 
Кожна група студентів повинна отримати необхідне обладнання та інженерний зошит групи. Потім відкрийте VEXcode V5.
| Кількість | Необхідні матеріали |
|---|---|
| 1 |
Робот Speedbot |
| 1 |
Заряджена батарея робота |
| 1 |
VEXcode V5 |
| 1 |
USB-кабель (якщо використовується комп’ютер) |
| 1 |
Інженерний зошит |
| 1 |
М'яч (розмір і форма футбольного м'яча) |
| 1 |
3м х 3м вільного простору |
| 1 |
Метр або лінійка |
| 1 |
Рулон стрічки |
| 1 |
![]() Поради вчителю
Поради вчителю
Змоделюйте для учнів кожен із кроків усунення несправностей.
Крок 1: Підготовка до дослідження
Перш ніж почати вправу, чи підготували ви кожен із цих елементів?
-
Чи розумні кабелі повністю вставлено в усі двигуни?
-
Акумулятор заряджений?
Крок 2: Розпочніть новий проект
Виконайте наступні кроки, щоб почати проект:
-
Відкрийте меню «Файл» і виберіть «Відкрити приклади».

-
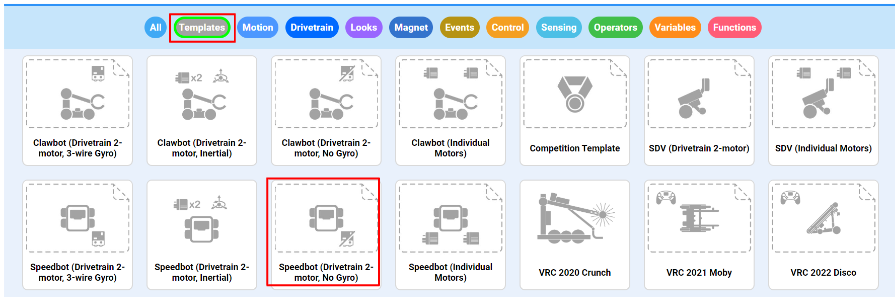
Виберіть і відкрийте проект шаблону Speedbot (Drivetrain 2-motor, No Gyro). Проект шаблону містить конфігурацію двигуна Speedbot . Якщо шаблон не використовується, ваш робот не запустить проект належним чином.
-
Оскільки ви працюватимете над вивченням швидкості, ви назвете свій проект DriveVelocity. Після завершення виберіть Зберегти.
![]() Поради вчителю
Поради вчителю
-
У назвах проектів між словами або після них можуть бути пробіли.

-
Ви можете попросити учнів додати свої ініціали або назву своєї групи до назви проекту. Це допоможе відрізнити проекти, якщо ви попросите студентів подати їх.
-
Оскільки це перша діяльність із програмування, яку можуть спробувати ваші студенти, вам слід змоделювати кроки, а потім попросити студентів виконати ті самі дії. Після цього вчитель повинен спостерігати за учнями, щоб переконатися, що вони правильно виконують кроки.
-
Переконайтеся, що учні вибрали «Відкрити приклади» в меню «Файл».
-
Переконайтеся, що учні вибрали шаблонний проект Speedbot (2-моторний двигун, без гіроскопа).
-
Ви можете звернути увагу учнів на те, що на сторінці прикладів можна вибрати кілька варіантів. У міру створення та використання інших роботів вони матимуть можливість використовувати різні шаблони.
- Переконайтеся, що назва проекту DriveVelocity тепер у вікні в центрі панелі інструментів.

![]() Інструменти вчителя
-
Збереження проектів
Інструменти вчителя
-
Збереження проектів
-
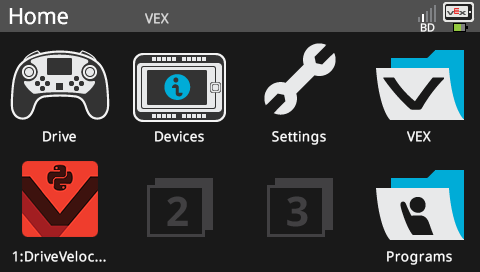
Зверніть увагу, що коли вони вперше відкрили VEXcode V5, вікно було позначено VEXcode Project. Проект VEXcode — це назва проекту за умовчанням, коли VEXcode V5 відкривається вперше. Після того, як проект було перейменовано на Диск і збережено, на дисплеї було оновлено нову назву проекту. Використовуючи це вікно на панелі інструментів, легко перевірити, чи студенти використовують правильний проект.
-
Скажіть учням, що тепер вони готові розпочати свій перший проект. Поясніть учням, що лише виконавши кілька простих кроків, вони зможуть створити та запустити проект, який просуне Speedbot вперед.
-
Нагадайте учням зберігати свої проекти під час роботи. У розділі Python бібліотеки VEX пояснюється практика збереження у VEXcode V5.
![]() Інструменти вчителя
-
Зупиніться та обговоріть
Інструменти вчителя
-
Зупиніться та обговоріть
Це хороший момент, щоб зробити паузу та попросити студентів переглянути кроки, які щойно було виконано під час запуску нового проекту у VEXcode V5 окремо або в групах. Попросіть студентів поміркувати окремо перед тим, як поділитися зі своєю групою чи всім класом.
Крок 3: рухайтеся вперед на 150 мм з різними швидкостями
Ви ще не готові почати програмувати робота, щоб рухатися вперед з різними швидкостями!
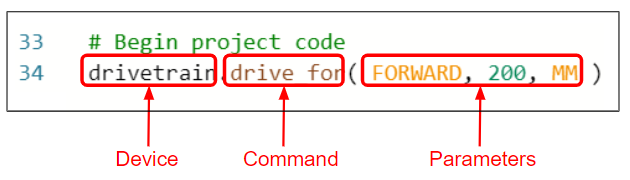
- Перш ніж почати програмування, нам потрібно зрозуміти, що таке інструкція. В інструкції є три частини.
![]() Поради вчителю
Поради вчителю
Ви можете помітити функцію автозаповнення, коли починаєте вводити інструкцію. Використовуйте клавіші «Вгору» та «Вниз», щоб вибрати потрібне ім’я, потім натисніть «Tab» або (Enter/Return) на клавіатурі, щоб зробити вибір. Щоб дізнатися більше про цю функцію, перегляньте статтю Python . 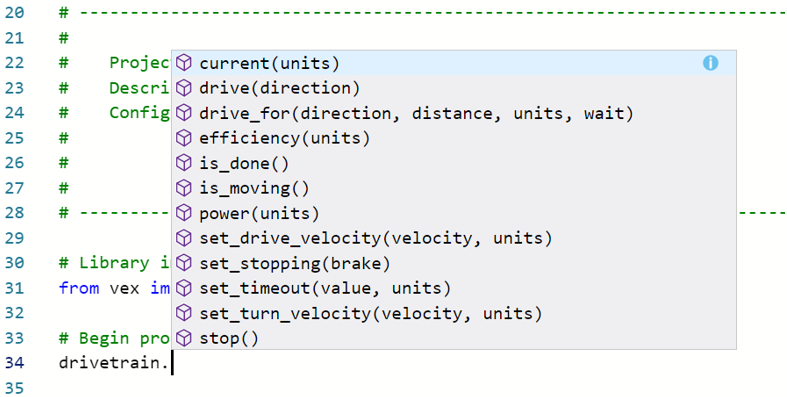
- Додати інструкцію до проекту:
![]() Поради вчителю
Поради вчителю
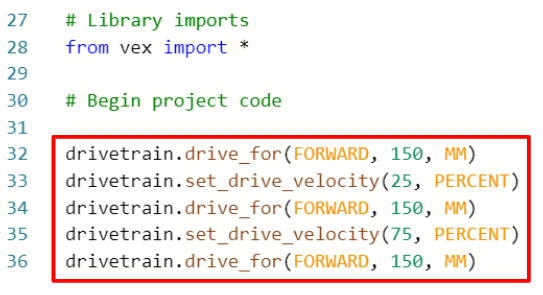
Зверніть увагу, що друга і третя інструкції (рядки 33 і 34 на зображенні вище) такі ж, як четверта і п’ята інструкції (рядки 35 і 36 вище), але з іншим параметром швидкості. Після додавання третьої інструкції студенти можуть виділити рядки, які потрібно повторити, і скопіювати та вставити їх, щоб завершити проект. Потім вони можуть змінити швидкість у четвертому рядку до 75 відсотків.
-
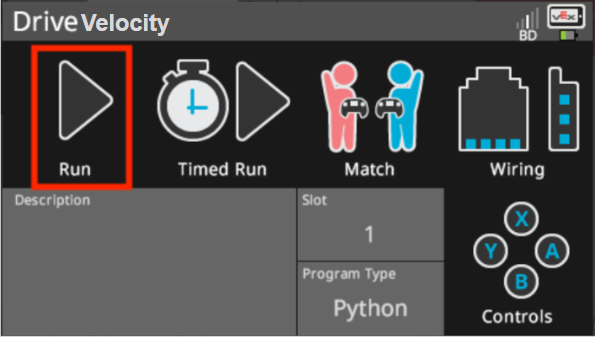
Натисніть піктограму слота, щоб вибрати один із восьми доступних слотів у мозку робота, і виберіть слот 1.

-
Підключіть мозок робота V5 до комп’ютера за допомогою кабелю мікро-USB і ввімкніть мозок робота V5. Піктограма «Мозок» на панелі інструментів стає зеленою після успішного підключення.

-
Виберіть Завантажити , щоб завантажити проект у Brain.

![]() Інструменти вчителя
Інструменти вчителя
- Нагадайте учням від’єднати кабель USB від мозку робота. Підключення робота до комп’ютера під час виконання проекту може призвести до того, що робот потягне за з’єднувальний кабель.
-
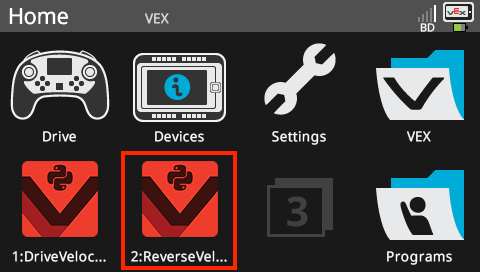
Перевірте, чи ваш проект завантажено (Python) , подивившись на екран Robot Brain. Назва проекту DriveVelocity повинна бути вказана в слоті 1.
![]() Інструменти вчителя
Інструменти вчителя
-
Зупиніться та обговоріть
Попросіть учнів передбачити, що, на їхню думку, станеться, коли цей проект буде завантажено та запущено на роботі Speedbot. Скажіть учням записати свої передбачення у своїх інженерних зошитах. Якщо дозволяє час, попросіть кожну групу поділитися своїм прогнозом.Студенти повинні передбачити, що Speedbot спочатку рухатиметься вперед зі швидкістю за замовчуванням (50%), потім повільніше (25%), ніж швидкість за замовчуванням, а потім швидше (75%), ніж швидкість за замовчуванням.
-
Спочатку змоделюйте
Змоделюйте виконання проекту перед класом, перш ніж спробувати всі учні одночасно. Зберіть учнів в одній зоні та залиште достатньо місця для руху Speedbot, якщо він стоїть на підлозі.Скажіть учням, що тепер їхня черга виконувати свій проект. Переконайтеся, що вони мають вільний шлях і що швидкісні боти не зіткнуться один з одним.
-
Запустіть (Python) проект на роботі, переконавшись, що проект вибрано, а потім натисніть кнопку Запустити у мозку робота. Вітаємо зі створенням вашого першого проекту!
Крок 4: Рухайтеся вперед і назад на 150 мм на різних швидкостях
Тепер, коли ви запрограмували свого робота на рух вперед із різними швидкостями, запрограмуйте його на рух вперед і назад із різними швидкостями.
-
Змініть параметр у другій інструкції drive_for , щоб відобразити REVERSE.

-
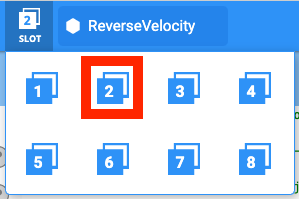
Виберіть назву проекту, щоб змінити її з DriveVelocity на ReverseVelocity.

-
Натисніть піктограму слота, щоб вибрати новий слот. Виберіть слот 2.
-
Завантажте (Python) проект.

-
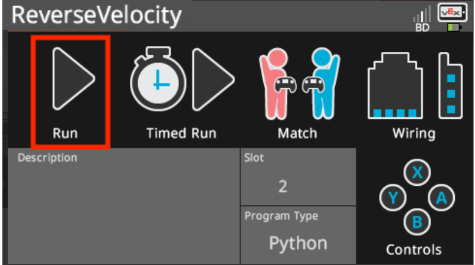
Перевірте, чи ваш проект завантажено (Python) , подивившись на екран Robot Brain. Назва проекту ReverseVelocity повинна бути вказана в слоті 2.
-
Запустіть (Python) проект на роботі, переконавшись, що проект вибрано, а потім натисніть кнопку Запустити у мозку робота.
![]() Інструменти вчителя
Виконання кроку
Інструменти вчителя
Виконання кроку
-
Щоб змінити команду drive_for з вперед на назад, просто змініть перший параметр на REVERSE. Це змусить двигуни трансмісії рухатися в протилежному напрямку.
-
Кількість мм можна змінити, але для цього прикладу ми залишимо їх на рівні 150 мм, як було встановлено на попередньому кроці.
-
Нагадайте учням від’єднати кабель USB від мозку робота перед запуском проекту.
-
Нагадайте учням зберігати свої проекти під час роботи. У бібліотеці VEX є розділ для Python , у якому пояснюється практика збереження у VEXcode V5.
![]() Поради вчителю
Поради вчителю
Попросіть команди розділити зону для тестування та м’яч, якщо це необхідно, але також можна створити кілька зон для тестування, кожна зі своїм м’ячем. Вирішіть, чи хочете ви створити зону(и) тестування, чи хочете, щоб це зробили студенти.
Крок 5: Налаштування зони тестування
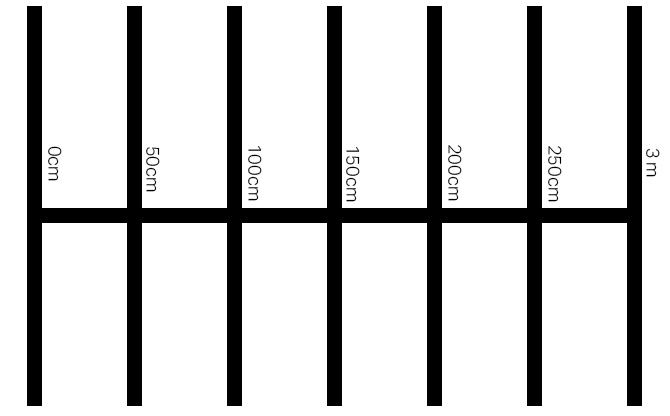
-
Використовуйте стрічку та метр, щоб створити 3-метрову лінію на підлозі, як горизонтальну лінію, показану на зображенні вище.
-
Після того, як лінія створена, скористайтеся стрічкою та метром ще раз, щоб створити лінії довжиною 1 м через лінію 3 м, як вертикальні лінії на зображенні вище. Наклейте лінію довжиною 1 м через кожні 50 см на вертикальній лінії, починаючи з 0 см.
-
Коротші горизонтальні лінії повинні бути відцентровані відносно довшої вертикальної лінії.
-
-
Поки область налаштовується, один або два члени вашої команди повинні створити новий проект під назвою Momentum. Встановіть швидкість на 50% і попросіть Speedbot рухатися вперед до першої лінії на 50 см. Майте на увазі, що 1 см = 10 мм, тому робот буде рухатися вперед на 50 см або 500 міліметрів.
![]() Інструменти вчителя
-
Чому це завдання?
Інструменти вчителя
-
Чому це завдання?
-
Збір і аналіз даних, навіть просте розпізнавання образів, є основними науковими навичками. Ця дія додає структуру аналізу даних, запобігаючи поширеним помилкам.
-
Зауважте, що в інструкціях студентам не наказано змінювати відстань руху робота разом із зміною швидкості робота. Це навмисне застосування того, що дослідники називають стратегією контролю змінних. Навчати дослідників-початківців маніпулювати однією змінною за раз (тобто швидкістю в даному випадку) для визначення її впливу на другу змінну (тобто відстань, яку м’яч проходить після зіткнення) важливо, оскільки це не обов’язково той підхід, який приймуть студенти. спонтанно за принципом «здогадайся і перевір». Типові підходи «пригадай і перевір» часто маніпулюють декількома змінними одночасно (тобто змінюють як швидкість, так і відстань, яку проходить робот), і спостерігають за впливом злиття на відстань, яку м’яч проходить після обертання. Ця діяльність намагається відвернути студентів від цього, оскільки зв’язки між змінними тоді неоднозначні. Більша швидкість робота, більша відстань, яку робот проїжджає, чи те й інше спонукає м’яч рухатися далі? Ми не можемо відповісти на це, якщо маніпулюємо обома змінними одночасно.
-
Однак команди можуть спонтанно спробувати проїхати робота на різні відстані. Якщо ви помітили це, попросіть їх лише змінити відстань, але зберегти швидкість такою ж, як у випробуванні з початковою дистанцією 500 мм. Таким чином вони можуть порівнювати ту саму швидкість з різними дистанціями, щоб побачити, чи відстань робота також впливає на те, наскільки далеко м’яч подолає.
Крок 6: Перевірка передачі енергії під час зіткнень

Тестовий майданчик для боулінгу з роботом і м’ячем
Центруйте м’яч на горизонтальній лінії на відстані 50 см і розташуйте робота так, щоб його передня частина була в центрі горизонтальної лінії на відстані 0 см. Переконайтеся, що передня частина робота спрямована в напрямку м’яча. Запустіть свій перший проект Momentum зі швидкістю, встановленою на 50%, і уважно спостерігайте за тим, як робот стикається з м’ячем.
Запишіть задану швидкість, пройдену відстань і відстань, яку подолав м’яч, у цю таблицю даних (Google / .pdf). Перший рядок таблиці було розпочато для вас на основі проекту Momentum, над яким ви працювали на попередньому кроці. Продовжуйте додавати дані до цієї таблиці, намагаючись встановити різні швидкості. Потім ви можете додати дані інших команд, обговорюючи свої висновки в класі.
![]() Поради вчителю
Поради вчителю
-
Підготуйте зону, щоб м’яч відскакував у різних напрямках на різні відстані. За необхідності закрийте двері та/або вікна.
-
Таблицю для вивчення швидкості можна зберегти знизу, або учні можуть відтворити таблицю у своїх зошитах з техніки.
-
Рубрику для оцінювання блокнотів для командного проектування можна знайти тут (Google / .docx / .pdf), а рубрику для оцінювання окремих блокнотів можна знайти тут (Google / .docx / ). pdf). Щоразу, коли ви плануєте оцінювати роботу студентів за допомогою рубрики, обов’язково повідомте їм цю рубрику, перш ніж вони почнуть працювати над проектом.

Збираючи дані, подумайте та дайте відповідь на наведені нижче запитання у своєму інженерному блокноті:
-
Як можна зрозуміти, що імпульс робота передав енергію м’ячу під час зіткнення? Поясніть з подробицями.
-
Повторіть тест ще мінімум двічі. Спробуйте встановити швидкість менше 50%. Поверніть м’яч на його місце та запишіть у таблицю, яку відстань м’яч пройшов. Крім того, спробуйте збільшити швидкість більше 50%. Поверніть м’яч на його місце та запишіть у таблицю, яку відстань м’яч пройшов.
-
Коли всі групи завершать свої три тести, обговоріть швидкості, які обрали інші групи, і яку відстань пройшов м’яч під час їхніх тестів. Коли команди діляться своїми даними, додайте їх висновки до своєї таблиці.
-
Шукайте шаблон(и) у даних. Збільшується чи зменшується шлях, пройдений кулькою, із збільшенням заданої швидкості?
![]() Інструменти вчителя
Інструменти вчителя
-
Рух м'яча є свідченням того, що робот передав енергію під час зіткнення. Учні також можуть описати швидкість м’яча після удару або напрямок його руху як доказ.
-
Відстань, яку проходить м’яч, залежить від маси/ваги використовуваного м’яча та швидкості, встановленої для робота.
-
Учні повинні розуміти, що вищі швидкості змушують м’яч рухатися далі, ніж нижчі швидкості. Явно зв’яжіть це з імпульсом робота. Підкресліть, що вага робота не змінилася, змінилася лише його швидкість, але обидва впливають на імпульс робота. Запитайте їх, чи вони думають, що м’яч полетів би так далеко, якби робот був важчим. Мабуть, так і буде. Більше про вплив маси м’яча під час зіткнення – у наступному читанні.
-
Групи студентів могли вибрати різні швидкості, але загальна мета навчання полягає в тому, щоб студенти визнали, що вищі швидкості призводять до більшого імпульсу, який передає більше енергії м’ячу під час зіткнення.