
![]() Мұғалімнің құралдар жинағы
Мұғалімнің құралдар жинағы
-
Әрекеттің жоспары
Бұл зерттеу алдымен студенттерді көлік жүргізу жылдамдығын орнатумен таныстырады, содан кейін олардан роботтың жылдамдығы оның импульсіне қалай әсер ететінін зерттеуді сұрайды. Осы әрекеттің сұлбасы үшін осы жерді басыңыз (Google ). Роботтың серпінін түсіну Strike Challenge боулинг ойынында қолданылатын маңызды тұжырымдама болады. -
Оқушылар нені бағдарламалайды
Speedbot (Drivetrain 2-motor, No Gyro) үлгісі жобасын пайдалану студенттерге drive_for параметріне set_drive_velocity қосу арқылы Speedbot жылдамдығының параметрлерін өзгертуге мүмкіндік береді. нұсқау. Әрекеттің басқарылатын бөлігінде студенттер Speedbot-ті әртүрлі жылдамдықпен жылжытады және әрекеттің соңы олардан жылдамдықты бағдарламалау дағдыларын импульс пен энергияны тасымалдау сынақтарына қолдануды сұрайды.
Speedbot әртүрлі жылдамдықпен жүруге дайын!
Бұл зерттеу Speedbot бағдарламасын тапсырмаға ең қолайлы жылдамдықпен жүргізу үшін бағдарламалау туралы көбірек білуге көмектеседі. Соңындағы Strike Challenge ойынында допты жақсы бұрышта және үлкен күшпен соғу үшін Speedbot жылдамдығын табу керек, ол жылдам және үлкен серпінге ие болады, бірақ бақылауда қалады.
![]() Мұғалімнің құралдар жинағы
Мұғалімнің құралдар жинағы
Мұнда VEXcode V5 пайдаланушы интерфейсіне шолу берілген. Студенттер осы Momentum Alley STEM зертханасындағы әрекеттер кезінде осы қойындылар/түймелермен танысады. Осы қойындылар/түймелер туралы қосымша ақпарат беру үшін сілтемелер STEM зертханасында да берілген. 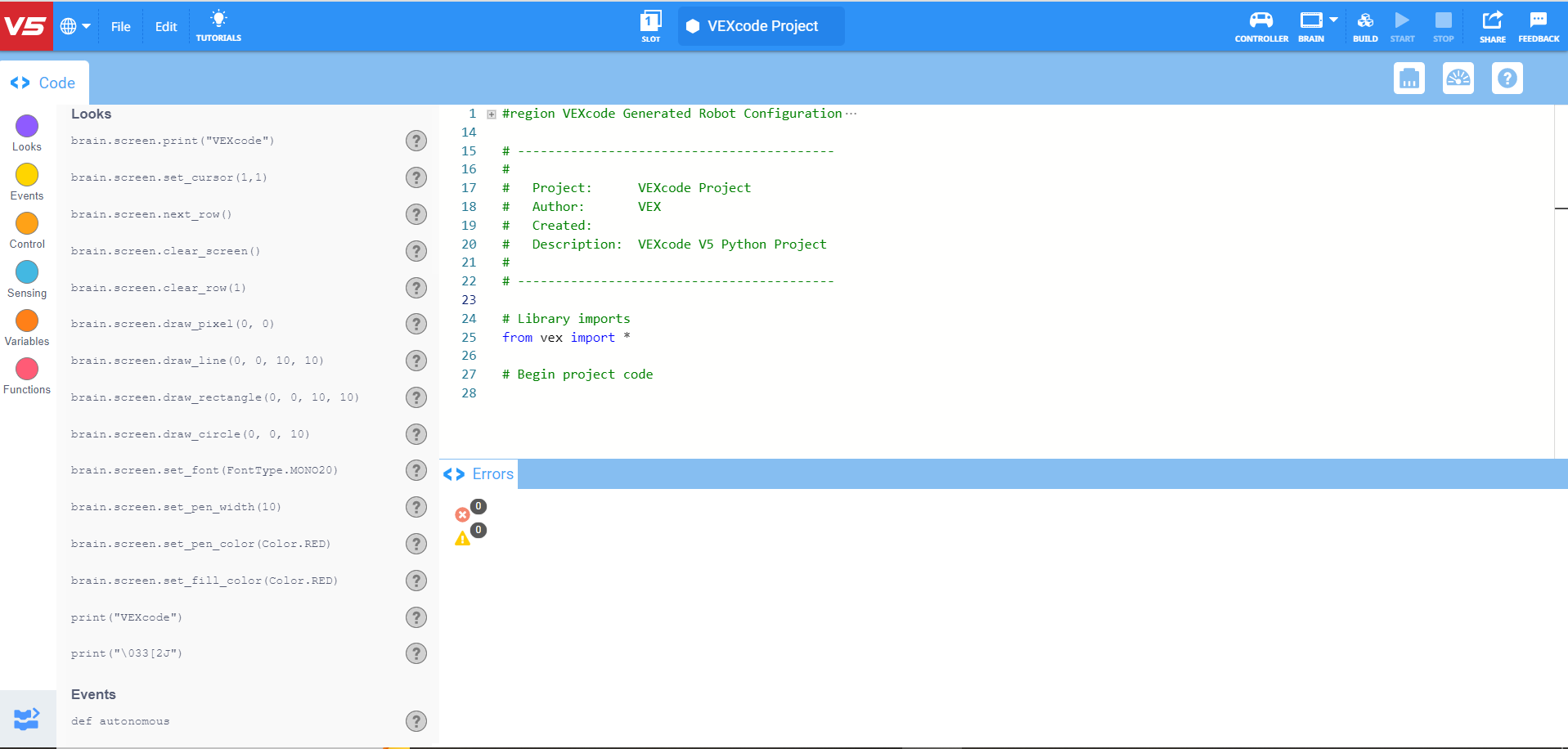
Осы тергеудің бірінші бөлігінде қолданылатын VEXcode V5 Python нұсқаулары:
-
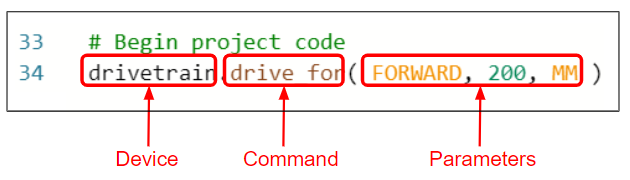
drivetrain.set_drive_velocity(50, PERCENT)
-
drivetrain.drive_for(АЛҒА, 200, мм)
-
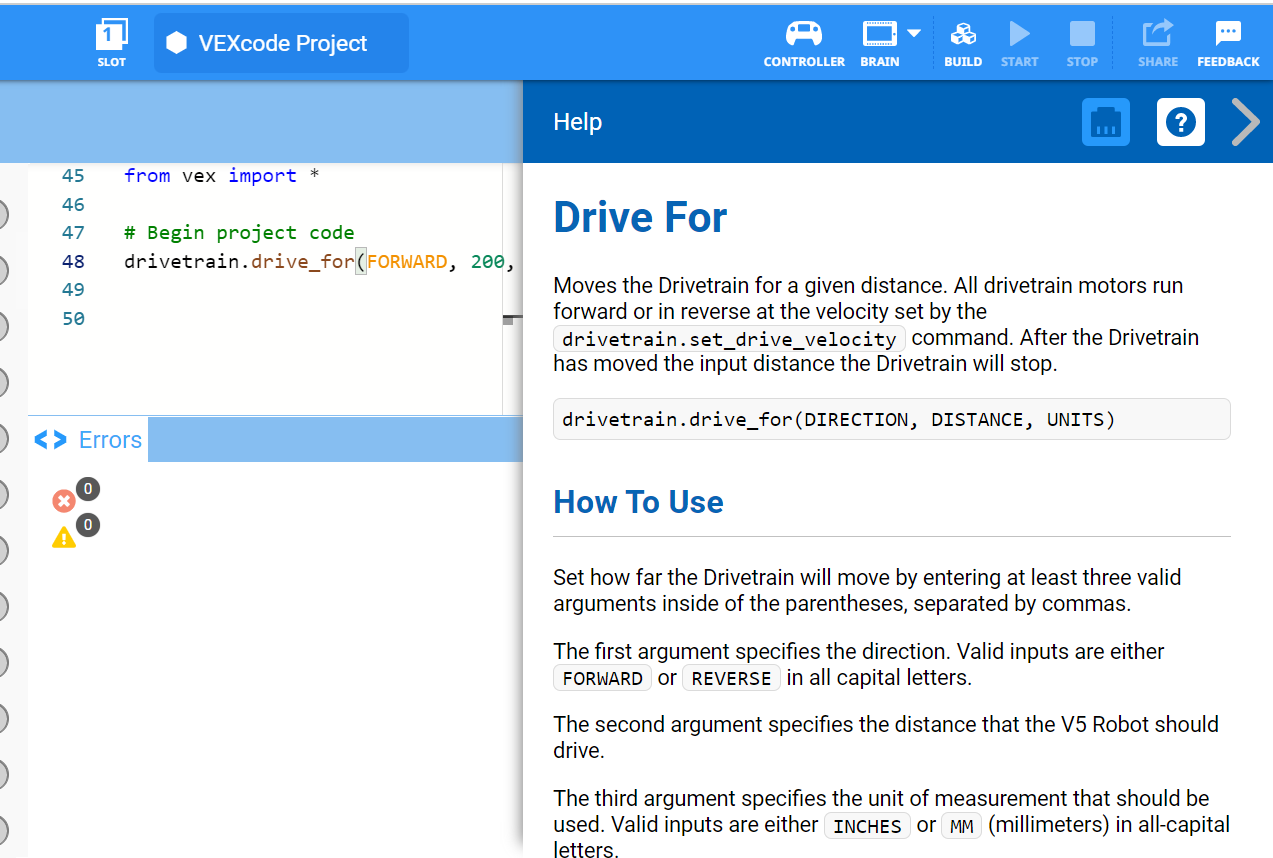
Нұсқау туралы қосымша ақпаратты білу үшін Анықтама опциясын таңдап, қосымша ақпаратты көру үшін нұсқаулықтың жанындағы сұрақ белгісі белгішесін таңдаңыз.
Қажетті жабдықтың, инженерлік жазу кітапшасының және VEXcode V5 жүктеп алынғанына және дайын екеніне көз жеткізіңіз.
![]() Мұғалімге арналған кеңестер
Мұғалімге арналған кеңестер
Егер студент VEXcode V5 қолданбасын бірінші рет пайдаланса, олар осы зерттеу барысында кез келген уақытта Оқулықтарға сілтеме жасай алады. Оқулықтар Құралдар тақтасында орналасқан. 
Әр топ студенттері қажетті техникалық құралдарды және топтың инженерлік дәптерін алуы керек. Содан кейін VEXcode V5 ашыңыз.
| Саны | Қажетті материалдар |
|---|---|
| 1 |
Speedbot роботы |
| 1 |
Зарядталған робот батареясы |
| 1 |
VEXcode V5 |
| 1 |
USB кабелі (компьютер пайдаланылса) |
| 1 |
Инженерлік дәптер |
| 1 |
Доп (футбол добының өлшемі мен пішіні) |
| 1 |
3м x 3м бос кеңістік |
| 1 |
Есептегіш таяқша немесе сызғыш |
| 1 |
Таспа орамы |
| 1 |
![]() Мұғалімге арналған кеңестер
Мұғалімге арналған кеңестер
Студенттер үшін ақауларды жою қадамдарының әрқайсысын модельдеңіз.
1-қадам: Барлауға дайындық
Әрекетті бастамас бұрын, сізде осы заттардың әрқайсысы дайын ба?
-
Барлық қозғалтқыштар дұрыс порттарғақосылған ба?
-
Смарт кабельдер барлық қозғалтқыштарға толығымен салынған ба?
-
Ми қосылды ма?
-
Батарея зарядталғанма?
2-қадам: Жаңа жобаны бастаңыз
Жобаны бастау үшін келесі қадамдарды орындаңыз:
-
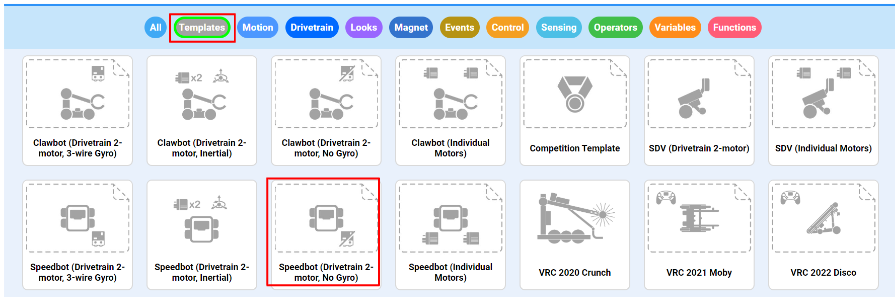
Файл мәзірін ашып, Мысалдарды ашу тармағын таңдаңыз.

-
Speedbot (Drivetrain 2-motor, No Gyro) үлгі жобасын таңдап, ашыңыз. Үлгі жобасында Speedbot қозғалтқыш конфигурациясыбар. Үлгі пайдаланылмаса, робот жобаны дұрыс іске қоспайды.
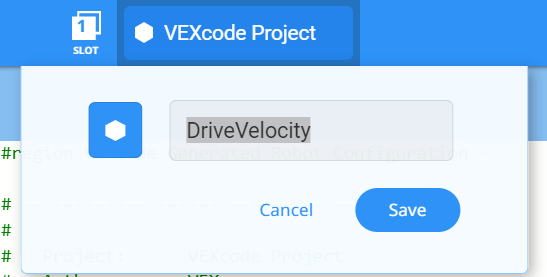
-
Сіз жылдамдықты зерттеумен жұмыс істейтіндіктен, жобаңызды DriveVelocityдеп атайсыз. Аяқтаған кезде Сақтау опциясын таңдаңыз.
![]() Мұғалімге арналған кеңестер
Мұғалімге арналған кеңестер
-
Жоба атауларында сөздердің арасында немесе одан кейін бос орындар болуы мүмкін.

-
Студенттерден жоба атына өздерінің бас әріптерін немесе топтың атын қосуды сұрауға болады. Бұл студенттерден оларды жіберуді сұрасаңыз, жобаларды ажыратуға көмектеседі.
-
Бұл студенттер әрекет етуі мүмкін бағдарламалаумен бірге бірінші әрекет болғандықтан, сіз қадамдарды үлгілеуіңіз керек, содан кейін студенттерден бірдей әрекеттерді орындауды сұраңыз. Одан кейін мұғалім оқушылардың қадамдарды дұрыс орындағанын қадағалауы керек.
-
Студенттер Файл мәзірінен Мысалдар ашу опциясын таңдағанына көз жеткізіңіз.
-
Оқушылардың Speedbot (Drivetrain 2-motor, No Gyro) үлгісі жобасын таңдағанына көз жеткізіңіз.
-
Сіз студенттерге Мысалдар бетінде таңдауға болатын бірнеше таңдау бар екенін көрсете аласыз. Олар басқа роботтарды жасап, пайдаланған кезде әртүрлі үлгілерді пайдалану мүмкіндігі болады.
- Құралдар тақтасының ортасындағы терезеде DriveVelocity жоба атауының бар екенін тексеріңіз.

![]() Мұғалімнің құралдар жинағы
-
Жобаларды сақтау
Мұғалімнің құралдар жинағы
-
Жобаларды сақтау
-
VEXcode V5 алғаш ашылған кезде, терезе VEXcode жобасы деп белгіленгенін атап өтіңіз. VEXcode жобасы VEXcode V5 алғаш ашылған кездегі әдепкі жоба атауы болып табылады. Жоба Drive деп өзгертіліп, сақталғаннан кейін дисплей жаңа жоба атауын көрсету үшін жаңартылды. Құралдар тақтасындағы бұл терезені пайдалану арқылы оқушылардың дұрыс жобаны пайдаланып жатқанын тексеру оңай.
-
Оқушыларға олардың енді бірінші жобасын бастауға дайын екенін айтыңыз. Оқушыларға бірнеше қарапайым қадамдарды орындау арқылы олар Speedbot-ті алға жылжытатын жобаны жасап, іске қоса алатынын түсіндіріңіз.
-
Жұмыс барысында студенттерге жобаларын сақтауды ескертіңіз. VEX кітапханасының Python бөлімі VEXcode V5 жүйесінде сақтау тәжірибесін түсіндіреді.
![]() Мұғалімнің құралдар жинағы
-
Тоқта және талқыла
Мұғалімнің құралдар жинағы
-
Тоқта және талқыла
Бұл кідіртуге және студенттерге VEXcode V5 жүйесінде жаңа жобаны жеке немесе топпен бастау кезінде жаңа ғана аяқталған қадамдарды қарап шығуға жақсы нүкте. Оқушылардан өз тобында немесе бүкіл сыныппен бөлісер алдында жеке рефлексия жасауын сұраңыз.
3-қадам: Әртүрлі жылдамдықпен 150 мм алға жылжытыңыз
Сіз роботты әртүрлі жылдамдықпен алға жылжу үшін бағдарламалауды бастауға дайын емессіз!
- Бағдарламалауды бастамас бұрын, біз нұсқаудың не екенін түсінуіміз керек. Нұсқау үш бөліктен тұрады.
![]() Мұғалімге арналған кеңестер
Мұғалімге арналған кеңестер
Нұсқауды теруді бастағанда автотолтыру функциясын байқауыңыз мүмкін. Қажет атты таңдау үшін «Жоғары» және «Төмен» пернелерін пайдаланыңыз, содан кейін таңдау жасау үшін пернетақтадағы «Tab» немесе (Enter/Return) түймесін басыңыз. Бұл мүмкіндік туралы қосымша ақпарат алу үшін Python мақаласын қараңыз. 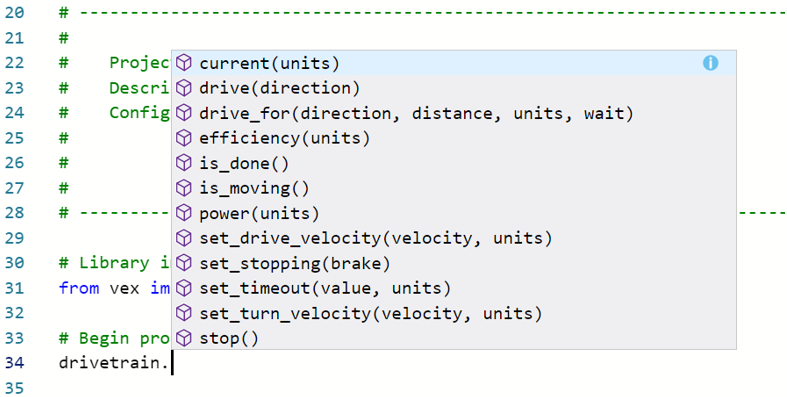
- Жобаға нұсқауларды қосыңыз:
![]() Мұғалімге арналған кеңестер
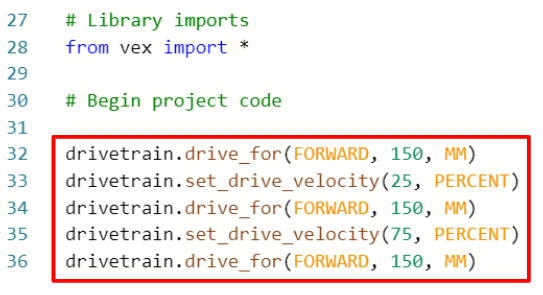
Мұғалімге арналған кеңестер
Назар аударыңыз, екінші және үшінші нұсқаулар (жоғарыдағы суреттегі 33 және 34-жолдар) төртінші және бесінші нұсқаулармен бірдей (жоғарыдағы 35 және 36-жолдар), бірақ жылдамдық параметрі басқа. Үшінші нұсқауларды қосқаннан кейін студенттер қайталанатын жолдарды ерекшелеп, жобаны аяқтау үшін оларды көшіріп, қоя алады. Содан кейін олар төртінші жолдағы жылдамдықты 75 пайызға дейін өзгерте алады.
-
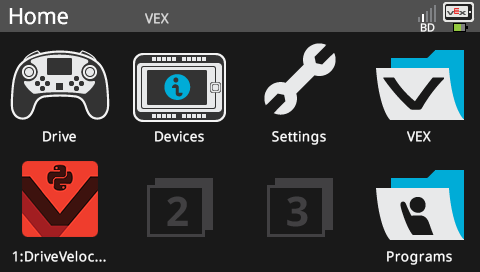
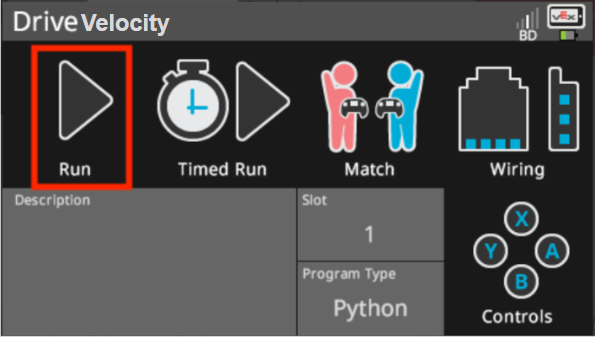
Robot Brain жүйесіндегі сегіз қолжетімді ұяның бірін таңдау үшін Slot белгішесін таңдап, 1-слотты таңдаңыз.

-
V5 робот миын микро USB кабелі арқылы компьютерге қосыңыз және V5 робот миын қосыңыз. Құралдар тақтасындағы Ми белгішесі сәтті қосылым жасалғаннан кейін жасыл түске болады.

-
Жобаны Миға жүктеп алу үшін Жүктеп алу опциясын таңдаңыз.

![]() Мұғалімнің құралдар жинағы
Мұғалімнің құралдар жинағы
- Оқушыларға USB кабелін робот миынан ажыратуды ескертіңіз. Жобаны іске қосу кезінде роботты компьютерге қосу роботтың қосылым кабелін тартып алуына әкелуі мүмкін.
-
Робот миының экранына қарап, жобаңыздың жүктеп алынғанын (Python) екенін тексеріңіз. Жоба атауы DriveVelocity 1-слотта көрсетілуі керек.
![]() Мұғалімнің құралдар жинағы
Мұғалімнің құралдар жинағы
-
Тоқта және талқыла
Студенттерден бұл жоба жүктеліп, Speedbot роботында іске қосылғанда не болатынын болжауын сұраңыз. Оқушыларға өз болжамдарын инженерлік дәптерлеріне жазуды айтыңыз. Уақыт болса, әр топтан өз болжамымен бөлісуді сұраңыз.Студенттер Speedbot алдымен әдепкі жылдамдығымен (50%) алға жылжитынын, содан кейін әдепкі жылдамдықтан баяу (25%), содан кейін әдепкі жылдамдықтан жылдамырақ (75%) болатынын болжауы керек.
-
Бірінші үлгі
Барлық оқушыларды бірден сынап көрмес бұрын, жобаны сынып алдында модельдеңіз. Оқушыларды бір аймаққа жинап, Speedbot еденге қойылған болса, қозғалуы үшін жеткілікті орын қалдырыңыз.Оқушыларға жобаны орындау кезегі екенін айтыңыз. Олардың анық жолы бар екеніне және ешбір Speedbot бір-бірімен соқтығыспайтынына көз жеткізіңіз.
-
Жобаның таңдалғанына көз жеткізу арқылы роботта жобаны іске қосыңыз (Python) , содан кейін робот миындағы Run түймесін басыңыз. Алғашқы жобаңызды жасауыңызбен құттықтаймыз!
4-қадам: Әртүрлі жылдамдықпен 150 мм алға және кері жүріңіз
Енді сіз роботты әртүрлі жылдамдықпен алға қарай жүруге бағдарламалаған болсаңыз, оны енді әртүрлі жылдамдықпен алға және кері жүруге бағдарламалаңыз.
-
REVERSEкөрсету үшін екінші drive_for нұсқаулығындағы параметрді өзгертіңіз.

-
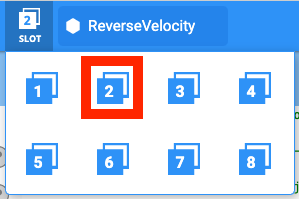
DriveVelocity -ден ReverseVelocity мәніне өзгерту үшін Жоба атауын таңдаңыз.

-
Жаңа ұяшықты таңдау үшін Slot белгішесін таңдаңыз. 2-слотты таңдаңыз.
-
(Python) жобаны жүктеп алыңыз.

-
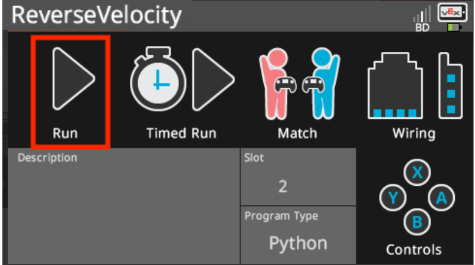
Робот миының экранына қарап, жобаңыздың жүктеп алынғанын (Python) екенін тексеріңіз. Жоба атауы ReverseVelocity 2-слотта көрсетілуі керек.
-
Жобаның таңдалғанына көз жеткізу арқылы роботта жобаны іске қосыңыз (Python) , содан кейін робот миындағы Run түймесін басыңыз.
![]() Мұғалімнің құралдар жинағы
-
4-қадамды аяқтау
Мұғалімнің құралдар жинағы
-
4-қадамды аяқтау
-
drive_for пәрменін алға ден керіге өзгерту үшін бірінші параметрді КЕРІ параметріне өзгерту жеткілікті. Бұл жетектегі қозғалтқыштар қарама-қарсы бағытта қозғалады.
-
мм санын өзгертуге болады, бірақ бұл мысал үшін біз оларды алдыңғы қадамда белгіленгендей 150 мм қалдырамыз.
-
Жобаны іске қоспас бұрын студенттерге USB кабелін робот миынан ажыратуды ескертіңіз.
-
Жұмыс барысында студенттерге жобаларын сақтауды ескертіңіз. VEX кітапханасында VEXcode V5 жүйесінде сақтау тәжірибесін түсіндіретін Python бөлімі бар.
![]() Мұғалімге арналған кеңестер
Мұғалімге арналған кеңестер
Қажет болса, командалардан сынақ алаңы мен допты бөлісуді сұраңыз, бірақ әрқайсысында өз добы бар бірнеше сынақ алаңдары да орнатылуы мүмкін. Тестілеу аймағын(лар)ын орнатқыңыз келе ме, әлде студенттерге осылай жасау керек пе, соны шешіңіз.
5-қадам: Сынақ аймағын орнату
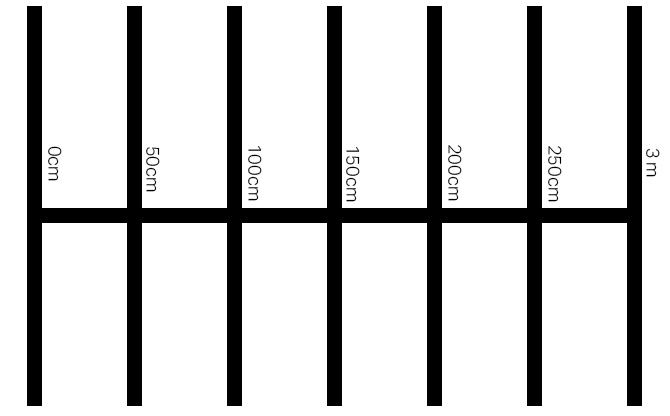
-
Жоғарыдағы суретте көрсетілген көлденең сызық сияқты еденде 3 м сызық жасау үшін таспа мен метр таяқшасын пайдаланыңыз.
-
Сызық жасалғаннан кейін жоғарыдағы суреттегі тік сызықтар сияқты 3м сызық бойымен 1м сызықтар жасау үшін тағы бір рет таспа мен өлшегіш таяқшаны пайдаланыңыз. 0 см-ден бастап тік сызықтың әрбір 50 см белгісіне 1 м сызықты таспамен салыңыз.
-
Қысқа көлденең сызықтар ұзынырақ тік сызықтың ортасына орналасуы керек.
-
-
Аймақ орнатылып жатқанда, сіздің командаңыздың бір немесе екі мүшесі Momentum атты жаңа жобаны жасауы керек. Жылдамдықты 50% етіп орнатыңыз және Speedbot дискісін бірінші жолға 50 см алға жылжытыңыз. 1 см = 10 мм екенін есте сақтаңыз, сондықтан робот 50 см немесе 500 миллиметр алға жылжиды.
![]() Мұғалімнің құралдар жинағы
-
Бұл әрекет не үшін керек?
Мұғалімнің құралдар жинағы
-
Бұл әрекет не үшін керек?
-
Деректерді жинау және талдау, тіпті қарапайым үлгіні тану ғылымның іргелі дағдылары болып табылады. Бұл әрекет жалпы қателіктерді болдырмау арқылы деректерді талдауға құрылым қосады.
-
Нұсқаулар студенттерге роботтың жүру қашықтығын және роботтың жылдамдығын өзгертуді айтпайтынына назар аударыңыз. Бұл зерттеуші ғалымдар айнымалыларды басқару стратегиясы деп атайтын әдейі қолдану. Жаңадан бастаған зерттеушілерді екінші айнымалыға (яғни, соқтығысқаннан кейін шар жүріп өткен қашықтық) әсерін анықтау үшін бір уақытта бір айнымалыны (яғни, бұл жағдайда жылдамдық) манипуляциялауға үйрету маңызды, өйткені бұл студенттер қабылдайтын әдіс емес. болжау және тексеру тәсілі бойынша өздігінен. Әдеттегі болжау және тексеру тәсілдері бір уақытта бірнеше айнымалы мәндерді басқарады (яғни, робот жүріп өткен жылдамдық пен қашықтықты өзгертеді) және доптың айналуынан кейін жүретін қашықтыққа түйісудің әсерін бақылайды. Бұл әрекет студенттерді осыдан алшақтатуға тырысады, өйткені айнымалылар арасындағы қарым-қатынастар сол кезде анық емес. Роботтың жылдамдығы неғұрлым жоғары болса, робот соғұрлым алыс жүрсе ме, әлде екеуі де допты алысқа апарады ма? Екі айнымалыны бір уақытта басқарғанда, біз бұған жауап бере алмаймыз.
-
Дегенмен, командалар роботты әртүрлі қашықтыққа өздігінен айдауға тырысуы мүмкін. Егер сіз мұны байқасаңыз, олардан тек қашықтықты өзгертуді сұраңыз, бірақ жылдамдықты бастапқы 500 мм қашықтықпен сынақ кезіндегідей сақтаңыз. Осылайша, олар роботтың жүру қашықтығы доптың қаншалықты алыс жүретініне де әсер ететінін білу үшін бірдей жылдамдықты әртүрлі жүру қашықтығымен салыстыра алады.
6-қадам: Соқтығыс кезінде энергияның берілуін тексеру

Робот пен доп бар боулинг сынақ алаңы
Допты көлденең сызықтың ортасына 50 см етіп қойыңыз және роботты оның алдыңғы жағы көлденең сызықтың ортасына 0 см болатындай етіп қойыңыз. Роботтың алдыңғы жағы доптың бағытына қарап тұрғанына көз жеткізіңіз. Жылдамдығы 50%-ға орнатылған алғашқы Momentum жобасын іске қосыңыз және робот доппен соқтығысқан кезде мұқият болыңыз.
Орнатылған жылдамдықты, жүріп өткен қашықтықты және шардың жүріп өткен жолын осы деректер кестесіне жазыңыз (Google / .pdf). Сіз үшін алдыңғы қадамда жұмыс істеген Momentum жобасы негізінде кестенің бірінші жолы басталды. Әртүрлі жылдамдықтарды орнатуға тырысқанда, осы кестеге деректерді қосуды жалғастырыңыз. Содан кейін сіз өз нәтижелеріңізді сынып ретінде талқылаған кезде басқа топтардың деректерін қоса аласыз.
![]() Мұғалімге арналған кеңестер
Мұғалімге арналған кеңестер
-
Доптың әртүрлі қашықтыққа әртүрлі бағытта секіру аймағын дайындаңыз. Қажет болса, есіктерді және/немесе терезелерді жабыңыз.
-
Жылдамдықты зерттеуге арналған кестені төменнен сақтауға болады немесе студенттер кестені инженерлік жазу дәптерінде қайта жасай алады.
-
Команданың инженерлік дәптерлерін бағалауға арналған рубриканы мына жерден табуға болады (Google ) және жеке жазу кітапшаларын бағалауға рубриканы осы жерден табуға болады (Google . pdf). Студенттердің жұмысын рубрика(лар) арқылы бағалауды жоспарласаңыз, олар жобамен жұмысты бастамас бұрын олармен айдармен бөлісуді ұмытпаңыз.

Деректерді жинау кезінде инженерлік дәптердегі төмендегі сұрақтарды ойластырып, оларға жауап беріңіз:
-
Соқтығыс кезінде роботтың импульсі энергияны шарға тасымалдағанын қалай анықтауға болады? Мәліметтермен түсіндіріңіз.
-
Сынақты тағы екі рет қайталаңыз. 50%-дан аз жылдамдықты қолданып көріңіз. Допты орнына келтіріп, доптың қанша қашықтыққа баратынын кестеге жазыңыз. Сондай-ақ, 50% жоғары жылдамдықты қолданып көріңіз. Допты орнына келтіріп, доптың қанша қашықтыққа баратынын кестеге жазыңыз.
-
Барлық топтар үш сынақты орындағаннан кейін, басқа топтар таңдаған жылдамдықтарды және олардың сынақтарында доптың қаншалықты алыс жүргенін талқылаңыз. Топтар өз деректерімен бөліскен кезде, олардың нәтижелерін кестеңізге қосыңыз.
-
Деректерден үлгі(лер)ді іздеңіз. Белгіленген жылдамдық артқан сайын шардың жүріп өткен жолы арта ма, әлде азая ма?
![]() Мұғалімнің құралдар жинағы
-
жауаптар
Мұғалімнің құралдар жинағы
-
жауаптар
-
Доптың қозғалысы роботтың соқтығыс кезінде энергияны тасымалдағанының дәлелі. Студенттер доптың соққыдан кейінгі жылдамдығын немесе оның қозғалыс бағытын дәлел ретінде сипаттай алады.
-
Доп жүретін қашықтық пайдаланылатын доптың массасына/салмағына және робот үшін орнатылған жылдамдыққа байланысты.
-
Студенттер жоғары жылдамдықтар допты төмен жылдамдықтарға қарағанда алысырақ жүруге әкелетінін түсінуі керек. Мұны роботтың импульсіне анық байланыстырыңыз. Роботтың салмағы өзгермегенін, тек оның жылдамдығын, бірақ екеуі де роботтың серпініне ықпал ететінін атап өтіңіз. Олардан егер робот ауыррақ болса, доп алысқа барады деп ойлай ма деп сұраңыз. Ол болар еді. Келесі оқылымда соқтығыс кезіндегі доптың массасының әсері туралы көбірек.
-
Студенттік топтар кең көлемде өзгермелі жылдамдықтарды таңдаған болуы мүмкін, бірақ жалпы оқу мақсаты студенттерге жоғары жылдамдықтар соқтығыстар кезінде допқа көбірек энергия беретін үлкен серпінге әкелетінін түсіну болып табылады.