
Řešení problému s řídícím letového provozu - Python
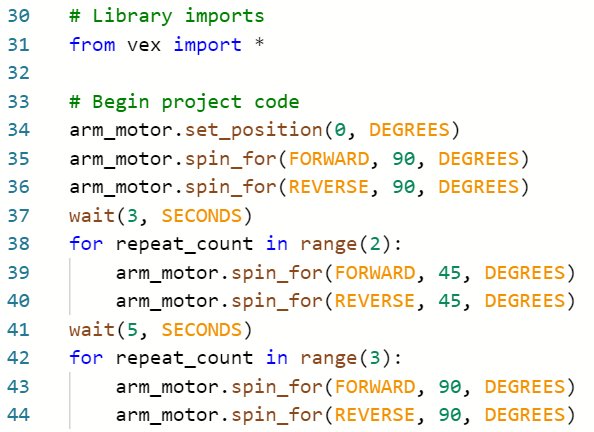
Vzhledem k tomu, že smyčky ještě nebyly zavedeny, je dokonale přijatelným řešením následující:
Pokročilejší studenti by mohli používat smyčky pro zjednodušení řešení.
STEM Labs
Speedy Delivery
Student
Vzhledem k tomu, že smyčky ještě nebyly zavedeny, je dokonale přijatelným řešením následující:
Pokročilejší studenti by mohli používat smyčky pro zjednodušení řešení.