
비행 교통 관제사 챌린지 솔루션 - Python
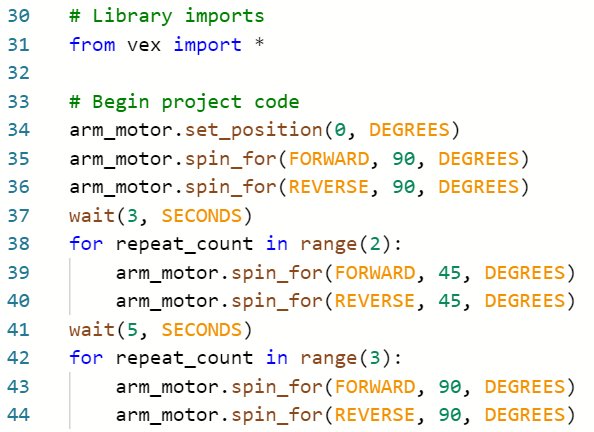
루프가 아직 도입되지 않았기 때문에 다음을 완벽하게 수용할 수 있는 솔루션입니다.
고급 학생들은 해결책을 단순화하기 위해 루프를 사용할 수 있습니다.
STEM 연구소
빠른 배송
학생 >
루프가 아직 도입되지 않았기 때문에 다음을 완벽하게 수용할 수 있는 솔루션입니다.
고급 학생들은 해결책을 단순화하기 위해 루프를 사용할 수 있습니다.