
Flight Traffic Controller Challenge Solution - Python
Because loops have not yet been introduced, the following is a perfectly acceptable solution:
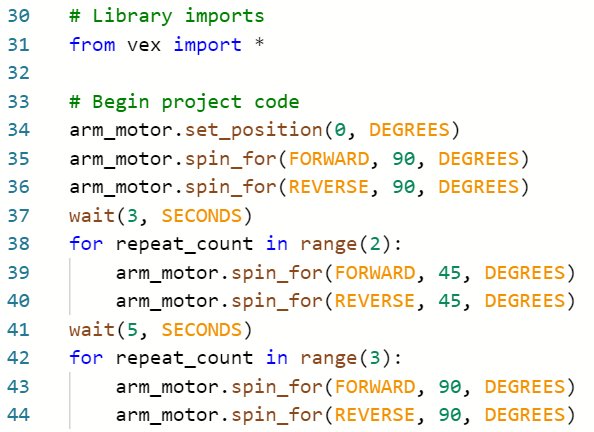
More advanced students might use loops to simplify the solution.
STEM Labs
Speedy Delivery
Student
Because loops have not yet been introduced, the following is a perfectly acceptable solution:
More advanced students might use loops to simplify the solution.