
Programming the Robot Arm - Blocks-based
The V5 Clawbot is ready to reach!
This exploration will give you the tools to be able to start creating some cool projects that use the V5 Clawbot's arm.
- VEXcode V5 that will be used in this exploration include:

- To find out more information about the block, open the Help and then select the [Spin for] block.

- Make sure you have the hardware required, your engineering notebook, and VEXcode V5 downloaded and ready.
| Quantity | Materials Needed |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (with up-to-date firmware) |
| 1 |
VEXcode V5 |
| 1 |
Engineering Notebook |
| 1 |
Clawbot and Advanced TrainingBot (Drivetrain 2-motor, No Gyro) example project |
Step 1: Preparing for the Exploration
Before you begin the activity, do you have each of these items ready? Check each of the following:
-
Are the motors plugged into the correct ports?
-
Are the smart cables fully inserted into all of the motors?
-
Is the Brain turned on?
-
Is the battery charged?
Step 2: Start a New Project
Before you begin your project, select the correct template project. The Clawbot and Advanced TrainingBot (Drivetrain 2-motor, No Gyro) template example project contains the Clawbot's motors configuration. If the template is not used, your robot will not run the project correctly.
Complete the following steps:
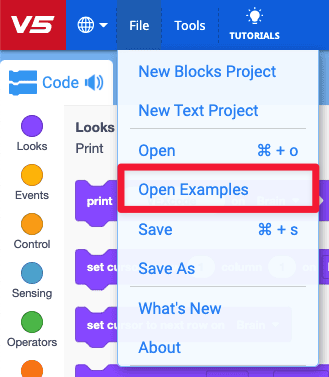
- Open the File menu.
- Select Open Examples.
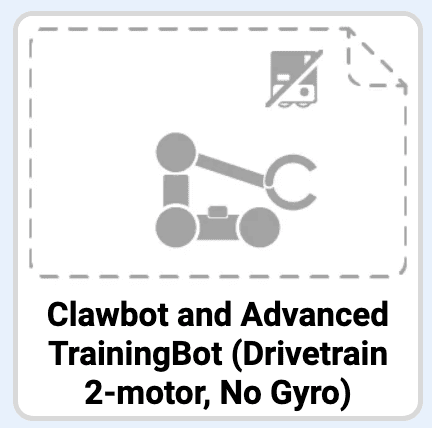
- Select and open the Clawbot and Advanced TrainingBot (Drivetrain 2-motor, No Gyro) template example project.
- Since we will be programming to control the arm, rename your project ArmControl.
- Save your project.
- Check to make sure the project name ArmControl is now in the window in the center of the toolbar.

Step 3: Move the Arm Up
We are now going to begin by programming the arm to raise!
- Add the [Spin for] block below the {When started} block in the programming area.

- Watch the Moving the Arm Tutorial in VEXcode V5 if you would like a demonstration.

- Click on the Slot icon. You can download your project to one of the available slots in the Robot Brain. Click on Slot 1.

- Connect the robot to your computer or tablet. The Brain icon in the toolbar turns green after a successful connection has been made.

- Click the Download button on the toolbar to download the Drive project to the Robot Brain.

- Check that the ArmControl project has downloaded to the brain in the slot you chose.
- Run the project on the Clawbot by making sure the project is selected and then press the Run button. Congratulations on creating your first Claw Arm project!
Step 4: Try This: Program the Arm Down
Now that you have programmed the arm to move up, you will now program the arm to lower or move down.

![]()
- Add a [Wait] block and a second [Spin for] block to your ArmControl project so that the arm raises to 90 degrees, waits 3 seconds, and then returns back down.
Hint: You will need to change the direction within the [Spin for] block. For more information about the [Wait] block, see VEXcode V5 Help feature. - Test that your revised project moves the arm up for 90 degrees, waits three seconds, and then moves the arm down for 90 degrees by downloading and running your ArmControl project.
- Notice that the arm holds its position while the [Wait] block is running. The motor draws power from the battery to hold the arm up against the force of gravity. That's because the default setting for having the motor stop is the <Hold> setting. There are two other settings for stopping - <Brake> and <Coast>. You will learn about those in another lab.
Step 5: Complete the Flight Traffic Controller Challenge
![]() In the Flight Traffic Controller Challenge, the Clawbot must move its arm up and down each for 90 degrees, wait 3 seconds, move the arm up and down twice each for 45 degrees twice, wait 5 seconds, and then move the arm up and down three times for 90 degrees.
In the Flight Traffic Controller Challenge, the Clawbot must move its arm up and down each for 90 degrees, wait 3 seconds, move the arm up and down twice each for 45 degrees twice, wait 5 seconds, and then move the arm up and down three times for 90 degrees.
Here is a list of the Clawbot's behaviors:
- Move arm up and then down for 90 degrees.
- Wait 3 seconds.
- Move arm up and then down for 45 degrees.
- Move arm up and then down for 45 degrees.
- Wait 5 seconds.
- Move arm up and then down for 90 degrees.
- Move arm up and then down for 90 degrees.
- Move arm up and then down for 90 degrees.