
Programování drápu - Python
![]() Nástin aktivit
učitele
Nástin aktivit
učitele
-
Tato ukázka seznámí studenty se základním programováním drápového motoru robota V5 Clawbot.
-
Naučit se programovat drápový motor umožňuje studentům správně ovládat, jak V5 Clawbot uchopuje předměty ve svém okolí.
Clawbot V5 je připraven k uchopení!
Tento průzkum vám umožní začít vytvářet některé skvělé projekty, které používají V5 Clawbotův dráp k uchopení objektů.
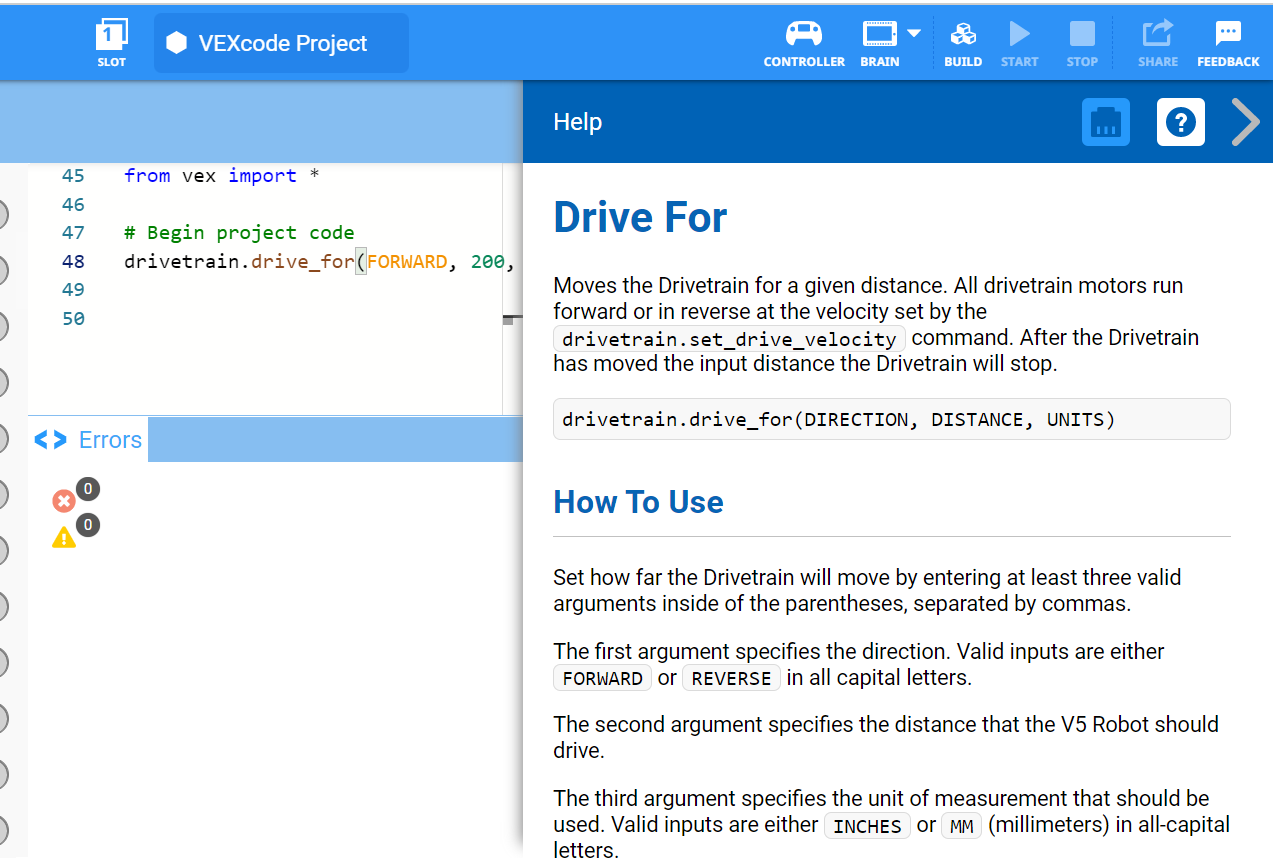
- Příkazy VEXcode V5 Python, které budou použity v tomto průzkumu, zahrnují:
- claw_motor.set_position(0, STUPNĚ)
- claw_motor.spin_for(VPŘED, 90 STUPŇŮ)
- claw_motor.set_timeout(2, SEKUNDY)
-
Chcete-li se dozvědět více informací o příkazu, vyberte ikonu otazníku vedle příkazu pro zobrazení dalších informací.
- Ujistěte se, že máte požadovaný hardware, svůj technický notebook a VEXcode V5 stažený a připravený.
| Množství | Potřebný materiál |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (s aktuálním firmwarem) |
| 1 |
VEXkód V5 |
| 1 |
Technický poznámkový blok |
| 1 |
Příklad projektu s Clawbotem a Advanced TrainingBot (pohon 2 motory, bez gyroskopu) |
| 1 |
Hliníková plechovka |
Krok 1: Příprava na průzkum
Než začnete s aktivitou, máte každou z těchto položek připravenou? Zkontrolujte každý z následujících bodů:
-
Jsou motory zapojeny do správných portů?
-
Jsou inteligentní kabelyzcela zasunutydo všech motorů?
![]() Tipy pro učitele
Tipy pro učitele
Předveďte studentům každý krok řešení problémů.
Krok 2: Zahájení nového projektu
Před zahájením projektu vyberte správný projekt šablony. Ukázkový projekt Clawbota a Advanced TrainingBot (pohon 2 motory, bez gyroskopu) obsahuje konfiguraci motoru Clawbota. Pokud šablonu nepoužijete, váš robot nebude projekt spouštět správně.

Dokonči následující kroky:
- Otevřete nabídku Soubor.
- VyberteOtevřítPříklady.
- Vyberte a otevřete ukázkový projekt Clawbot a Advanced TrainingBot (pohon se 2 motory, bez gyroskopu).
- Protože budeme programovat pro ovládání drápu, přejmenujte svůj projektClawControl.
- Uložtesvůj projekt.
- Zkontrolujte, zda je název projektu ClawControl nyní v okně uprostřed panelu nástrojů.

![]() Tipy pro učitele
Tipy pro učitele
- Protože se jedná o úvodní aktivitu s programováním, měl by učitel nejprve namodelovat jednotlivé kroky a poté požádat studenty, aby provedli stejné akce. Učitel by pak měl sledovat, zda studenti správně dodržují kroky.
- Ujistěte se, že studenti vybrali v nabídce Soubor možnost Otevřít příklady.
- Ujistěte se, že si studenti vybrali vzorový projekt Clawbot a Advanced TrainingBot (pohon se 2 motory, bez gyroskopu). Můžete studentům upozornit, že na stránce Příklady je k dispozici několik možností, ze kterých si mohou vybrat. Při stavbě a používání jiných robotů budou mít možnost používat různé šablony.
- Můžete studenty požádat, aby k názvu projektu přidali své iniciály nebo název své skupiny. To pomůže rozlišit projekty, pokud požádáte studenty, aby je odevzdali.
![]() Sada nástrojů pro učitele
Zastavte
a diskutujte
Sada nástrojů pro učitele
Zastavte
a diskutujte
Toto je dobrý bod k zastavení a k tomu, aby si studentské skupiny zopakovaly kroky, které byly právě dokončeny při zahájení nového projektu ve VEXcode V5.
Krok 3: Naprogramujte dráp V5 k otevření
Nyní začneme naprogramováním drápu, aby se otevřel!
# Import knihovny
z importu vex *
# Zahájit kód projektu
claw_motor.set_position(0, STUPNĚ)- Napište příkazclaw_motor.set_position(), jak je znázorněno výše, do programovací oblasti pro nastavení počáteční polohy drápu.
claw_motor.set_position(0, STUPNĚ)
claw_motor.set_timeout(2, SEKUNDY)- Přidejte příkazclaw_motor.set_timeout(), jak je znázorněno výše.
- Všimněte si, že tato instrukce se objevuje před příkazemclaw_motor.spin_for(). Jeho účelem je nastavit, jak dlouho může motor Claw běžet, a po uplynutí této doby jej zastavit. Takže i když se motor nepohybuje o celých 60 stupňů, projekt zastaví motor Claw po uplynutí dvou sekund.
claw_motor.set_position(0, STUPNĚ)
claw_motor.set_timeout(2, SEKUNDY)
claw_motor.spin_for(OBRÁCENĚ, 60, STUPNĚ)- Napište příkazclaw_motor.spin_for(), jak je znázorněno výše, pro otevření čelistí o 60 stupňů.

- Vyberte slot, do kterého bude projekt stažen na V5 Robot Brain výběrem ikony box 1 pro otevření všech dostupných slotů projektu a vyberte požadovaný slot.
- Připojte robota k počítači nebo tabletu. Ikona mozku v panelu nástrojůse po úspěšném navázání připojení rozsvítí zeleně.
- Kliknutím na ikonu Stáhnout vedle ikony Informace o zařízení stáhnete projekt do mozku robota V5.

- Zkontrolujte, zda byl projekt ClawControl stažen do mozku ve zvoleném slotu.
![]() Sada nástrojů pro učitele
Model
Sada nástrojů pro učitele
Model
Předveďte spuštění projektu před třídou, než ho všichni studenti zkusí najednou. Shromážděte studenty na jednom místě a umístěte Clawbota tak, aby jeho dráp viděli všichni. Pokud plánujete demonstraci provést více než jednou, můžete mezi jednotlivými cykly dráp jemně zatlačit do zavřené polohy.
Řekněte studentům, že nyní je řada na nich, aby vypracovali své projekty.
- Spusťteprojekt na Clawbotu tak, že se ujistíte, že je projekt vybrán, a poté stisknete tlačítko Spustit. Gratulujeme k vytvoření vašeho prvního projektu pro přemístění drápu!
Krok 4: Vyzkoušejte toto: Zavřete dráp V5
Nyní, když jste naprogramovali otevření drápu, nyní jej naprogramujete tak, aby se zavřel.
![]() Nyní, když můžete otevřít dráp, budete jej chtít také zavřít.
Nyní, když můžete otevřít dráp, budete jej chtít také zavřít.
- Vraťte se do projektu ClawControl a přidejte další příkazclaw_motor.spin_for(), aby se Claw Motor otočil o 30 stupňů. Dráp by se měl uzavřít do poloviny, protože se původně točil na 60 stupňů.
- Otestujte, že váš revidovaný projekt má dráp otevřený na 60 stupňů a poté zavřený na 30 stupňů stažením a spuštěním projektu ClawControl.
![]() Řešení
–
pro učitele – sada nástrojů
Řešení
–
pro učitele – sada nástrojů
Dříve se dráp otevíral na 60 stupňů. Součástí tohoto projektu byla instrukce pro nastavení časového limitu motoru, protože je důležité nastavit časový limit při napájení manipulátoru, jehož pohyb by mohl být nějakým způsobem omezen. Nastavení časového limitu zabraňuje zbytečnému opotřebení motoru.
Řešení tohoto kroku je následující:
# Začátek projektu
claw_motor.set_position(0, stupňů)
claw_motor.set_timeout(2, sekundy)
claw_motor.spin_for(zpět, 60 stupňů)
claw_motor.spin_for(vpřed, 30 stupňů)Krok 5: Vyzkoušejte toto: Sekvenování více pohybů
![]() Ne vše, co s drápem zvednete, bude mít stejnou velikost. Zkuste otevřít dráp do různých pozic v rozsahu pohybu.
Ne vše, co s drápem zvednete, bude mít stejnou velikost. Zkuste otevřít dráp do různých pozic v rozsahu pohybu.
- Otáčejte motorem, abyste:
- Otevřeno na 70 stupňů
- Zavřít na 20 stupňů
- Otevřeno na 10 stupňů
- Zavřít na 30 stupňů
- Zavřít na 25 stupňů
- Pokud motor Claw začíná při 0 stupních, kolik stupňů je motor Claw otevřen na konci projektu?
- Začněte se zavřeným motorem drápu.
![]() Řešení
–
pro učitele – sada nástrojů
Řešení
–
pro učitele – sada nástrojů
Řešení tohoto kroku je uvedeno níže.
Na konci projektu je drápový motor stále otevřený při 5 stupních: 70 - 20 = 50 --> 50 + 10 = 60 --> 60 - 30 = 30 --> 30 - 25 = 5 stupňů.
# Začátek projektu kód
# Vezměte aktuální pozici Claw jako nulu
claw_motor.set_position(0, DEGREES)
# Nastavte časový limit Claw
claw_motor.set_timeout(2, SECONDS)
claw_motor.spin_for(REVERSE, 70, DEGREES)
claw_motor.spin_for(FORWARD, 20, DEGREES)
claw_motor.spin_for(REVERSE, 10, DEGREES)
claw_motor.spin_for(FORWARD, 30, DEGREES)
claw_motor.spin_for(FORWARD, 25, DEGREES)Krok 6: Dokončení výzvy Lock Tight

![]() Výzva Lock Tight
Výzva Lock Tight
- Naprogramujte Clawbota, aby bezpečně uzavřel dráp na prázdné hliníkové plechovce o objemu 12 uncí, aniž byste rozdrtili boky.
- Nechte Clawbota držet plechovku, zatímco zvedá a spouští rameno o 45 stupňů.
- Clawbot by pak měl plechovku uvolnit a vycouvat z ní.
- Začněte výzvu s otevřeným drápem a prázdnou plechovkou uvnitř.
![]() Tipy pro učitele
Tipy pro učitele
- Nechte studenty začít s otevřenou drápou a prázdnou plechovkou uvnitř.
- Pokud se plechovka rozdrtí nebo vypadne z držáku, je nutné po úpravě projektu spustit výzvu znovu.
![]() Řešení
–
pro učitele – sada nástrojů
Řešení
–
pro učitele – sada nástrojů
Zde je příklad řešení:
# Začátek projektu kód
# Vezměte aktuální pozici Claw jako nulu
claw_motor.set_position(0, DEGREES)
# Nastavte časový limit Claw
claw_motor.set_timeout(2, SECONDS)
claw_motor.spin_for(FORWARD, 170, DEGREES)
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
claw_motor.spin_for(REVERSE, 150, DEGREES)
drivetrain.drive_for(REVERSE, 150, MM)- Projekt nastaví časový limit, zavře dráp kolem plechovky, zvedne a spustí plechovku, uvolní ji a poté se vrátí zpět.
-
Programovací rubrika
dokumentů Google.docx)