
Lektion 2: Fahren Sie zur Nummer '5'
In dieser Lektion fährt der VR-Roboter zur Nummer ‘5‘ und zurück zur Nummer ‘1‘ auf dem Number Grid Map Playground!

Beachten Sie, dass sich der VR-Roboter entlang der X-Achse bewegt, wobei die X-Werte steigen, um sich auf dem Zahlenrasterkarten-Spielplatz auf die Zahl "5" zu bewegen.

Der VR-Roboter fährt zur Position der Nummer ‘5‘ auf dem Number Grid Map Playground. Bevor der VR-Roboter jedoch zu dieser Nummer navigieren kann, muss dem VR-Roboter mitgeteilt werden, wo sich diese Nummer befindet. Beginnend in der Mitte des Spielplatzes sind die Koordinaten der Zahl ‘5’ (-100, -900).

- Um zu beginnen, muss der VR-Roboter der Zahl "5" gegenüberstehen. Ziehen Sie einen turn_for-Befehl hinein oder geben Sie ihn ein.
# Projektcode in "main" hinzufügen
def main():
drivetrain.turn_for(RECHTS, 90, GRAD)- Ziehen Sie in einer while -Schleife unter dem Befehl turn_for . Ihr Projekt sollte wie folgt aussehen:
# Add project code in "main"
def main():
drivetrain.turn_for(RIGHT, 90, DEGREES)
while condition:
wait(5, MS)- Genau wie die Entfernungssensoreinheit verwendet dieses Projekt den Zustand der Position des Positionssensors mit einem Vergleichsoperator, um durch den Zahlenrasterkartenspielplatz zu navigieren. Stellen Sie die Bedingung für die while-Schleife auf den Positionsbefehl in der X-Achse von weniger als -100 in Millimetern (mm) ein. Ihr Projekt sollte wie folgt aussehen:
# Fügen Sie den Projektcode in "main"
def main() hinzu
: drivetrain.turn_for (RIGHT, 90, DEGREES)
while location.position (X, MM) < -100:
wait(5, MS)- Ziehen oder geben Sie den nicht wartenden Laufwerksbefehl in die while -Schleife ein. Ihr Projekt sollte wie folgt aussehen:
# Projektcode in "main" hinzufügen
def main(): drivetrain.turn_for
(RIGHT, 90, DEGREES)
while location.position(X, MM) < -100:
drivetrain.drive(FORWARD)
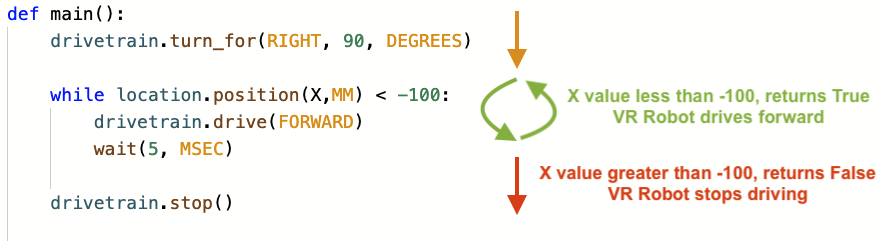
wait(5, MSEC)- Beachten Sie, dass der Operator less than anstelle des Operators greater than verwendet wird, da der VR-Roboter von der linken Seite des Spielplatzes nach rechts fährt. Der VR-Roboter startet bei einem X-Wert von -900 Millimetern (mm). Wenn der VR-Roboter vorwärts fährt, erhöhen sich die X-Werte, und somit fährt der Roboter weiter vorwärts, während der X-Wert kleiner als -100 ist.
Zur Kenntnisnahme
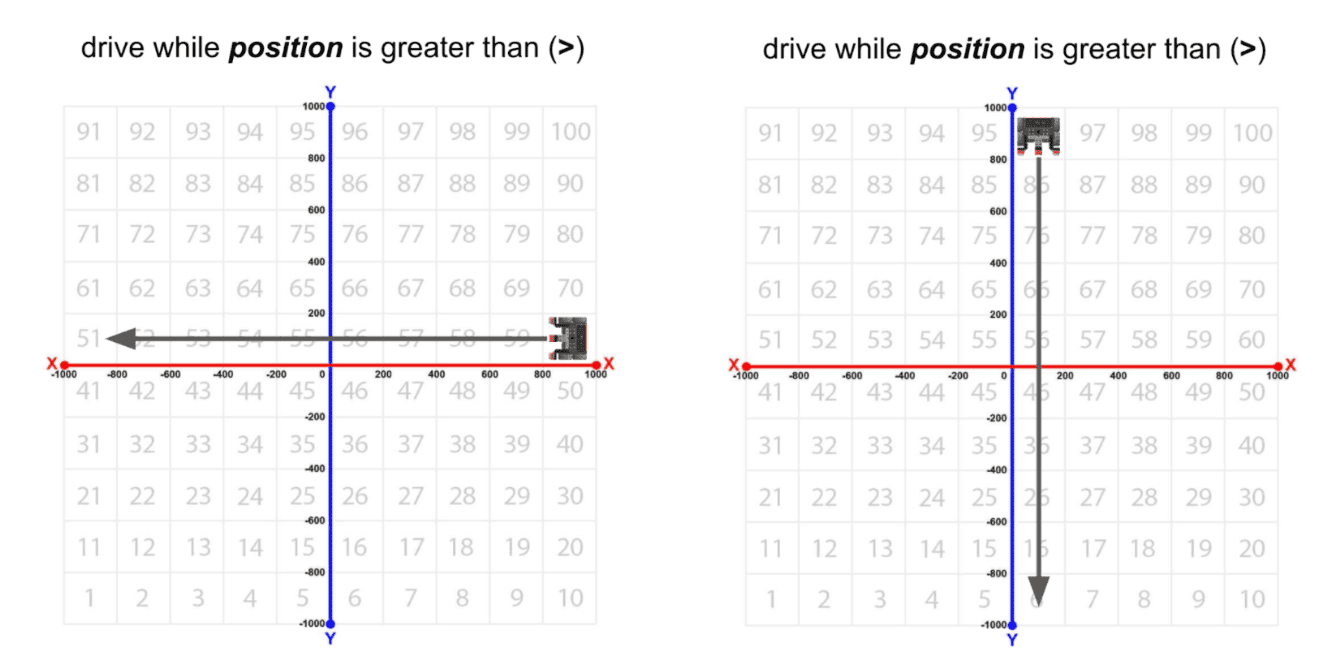
Sie müssen auswählen, welcher Vergleichsoperator in Ihrem Projekt verwendet werden soll, abhängig von der Richtung, in die der VR-Roboter entlang der X- oder Y-Achse fahren soll. Wenn der VR-Roboter auf einen größeren Wert zufährt, wird der Operator kleiner als (<) mit einer while-Schleife verwendet; und wenn der VR-Roboter auf einen kleineren Wert zufährt, wird der Operator größer als (>) mit einer while-Schleife verwendet.
Dies stimmt mit linken und rechten Bewegungen beim Blick auf den Spielplatz überein. Wenn sich der VR-Roboter von links nach rechts oder von unten nach oben bewegt (größere Werte), wird der weniger als -Bediener zum Fahren verwendet, während die Position kleiner als der Zielwert ist.

Wenn sich der VR-Roboter von rechts nach links oder von oben nach unten bewegt (kleinere Werte), wird der Größer-als-Bediener zum Fahren verwendet, während die Position größer als der Zielwert ist.
Mit den Vergleichsoperatoren fährt der VR-Roboter, während der vom Positionssensor gemeldete Wert größer als (>) oder kleiner als (<) der Schwellenwert ist. In diesem Beispiel navigiert der VR-Roboter auf der X-Achse zu positiven 500 Millimetern (mm). Der VR-Roboter fährt, während die Position auf der X-Achse irgendwo zwischen 0 und positiv 499 liegt. Wenn der Positionssensor meldet, dass die Position 501 oder höher ist, stoppt der VR-Roboter die Fahrt.
# Projektcode in "main" einfügen
def main():
monitor_sensor(location.position) drivetrain.turn_for
(RIGHT, 90, DEGREES)
while location.position(X, MM) < 500:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()Beachten Sie, dass der vom Positionssensor gemeldete Wert nicht genau 500 Millimeter (mm) beträgt. Wie der Abstandssensor werden die Vergleichsoperatoren aufgrund der Zeit verwendet, die der VR-Roboter benötigt, um das Projekt zu durchlaufen und Werte zu melden.
- Ziehen oder geben Sie einen Stoppbefehl außerhalb der while -Schleife ein. Ihr Projekt sollte wie folgt aussehen:
# Projektcode in "main" hinzufügen
def main(): drivetrain.turn_for
(RIGHT, 90, DEGREES)
while location.position(X, MM) < -100:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()- Öffnen Sie das Playground-Fenster , wenn es noch nicht geöffnet ist. Stellen Sie sicher, dass sich der Number Grid Map Playground öffnet, und führen Sie das Projekt aus.
- Beobachten Sie, wie der VR-Roboter auf dem Number Grid Map Playground zur Nummer „5“ fährt.

- In diesem Projekt fährt der VR-Roboter zur Nummer ‘5‘ auf dem Number Grid Map Playground. Die while-Schleife wird verwendet, damit der VR-Roboter weiter vorwärts fährt, während der X-Wert kleiner als der X-Wert der Koordinate ist, auf der sich die angegebene Zahl befindet.
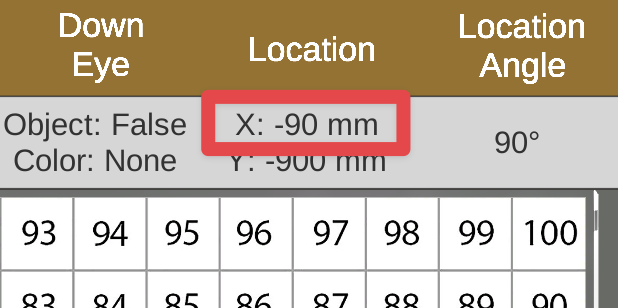
- Sobald der X-Wert größer als -100 ist, wechselt das Projekt zum nächsten Befehl außerhalb der Schleife, bei dem es sich um einen Stopp-Befehl handelt. Da der X-Wert der Zahl ‘5‘ -100 ist, hört der VR-Roboter auf zu fahren, sobald der X-Wert größer als -100 ist.
Zur Kenntnisnahme
Beachten Sie, dass der vom Positionssensor gemeldete Wert möglicherweise nicht genau -100 Millimeter (mm) beträgt. Wie der Abstandssensor werden die Vergleichsoperatoren aufgrund der Zeit verwendet, die der VR-Roboter benötigt, um das Projekt zu durchlaufen und Werte zu melden.
In VEXcode VR Python können Sie einen Vergleichsoperator größer oder gleich (>=) oder kleiner oder gleich (<=) in Ihrem Projekt verwenden, um eine zusätzliche Präzision in Ihren Bewegungen zu erhalten.
# Projektcode in "main"
def main() einfügen: drivetrain.turn_for
(RIGHT, 90, DEGREES)
while location.position(X, MM) <= -100:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()Abhängig von der Geschwindigkeit des VR-Roboters und davon, wie schnell das Projekt die Schleife durchläuft, können Sie feststellen, dass der VR-Roboter näher am Schwellenwert anhalten kann, wenn dem Operator oder gleich (<= oder >=) hinzugefügt wird.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.