
Antecedentes
El Mars Rover: Landing Challenge Unit desafiará a sus estudiantes a construir proyectos VEXcode 123 para resolver un problema. Esta unidad presenta a los estudiantes el uso del sensor ocular en la parte frontal del robot 123 en un desafío, inspirado en el proceso que usan los científicos al intentar aterrizar naves espaciales, como el rover Mars 2020 Perseverance. Los estudiantes codificarán el Robot 123 para detectar un obstáculo, luego iluminarán un color para indicar que se encontró un obstáculo en el sitio de aterrizaje.
La misión Mars 2020 de la NASA
La misión Mars 2020 de la NASA aborda los objetivos científicos de alta prioridad para la exploración de Marte: la vida, el clima, la geología y los seres humanos. Pero antes de que el rover Perseverance pueda comenzar su misión recolectando muestras de roca y suelo en la superficie, el rover necesita aterrizar de manera segura en el Planeta Rojo.
Según la NASA, solo alrededor del 40% de las misiones enviadas a Marte (por cualquier agencia espacial) han tenido éxito. Todo el proceso de Entrada, Descenso y Aterrizaje tomará solo unos minutos, pero la nave espacial que transporta el rover Perseverance debe reducir la velocidad de casi 20.000 km por hora (~12.500 millas por hora) a cero y encontrar un área abierta y plana para aterrizar. La superficie marciana está llena de obstáculos: cráteres de impacto masivos, acantilados, grietas y rocas dentadas. Los vientos impredecibles también pueden provocar complicaciones adicionales.

Para ayudar a garantizar un aterrizaje seguro, el rover Perseverance tomará imágenes mientras desciende y las comparará con los mapas. Puede decidir rápidamente si los científicos determinaron que esa área era peligrosa y hacer ajustes para aterrizar en un área abierta. Mira el vídeo a continuación para ver cómo se espera que aterrice el rover.
En esta Unidad, los estudiantes codificarán el Robot 123 para detectar obstáculos en los sitios de aterrizaje en sus Campos 123 para ayudar a garantizar un aterrizaje seguro para el rover.
¿Qué es un sensor?
Un sensor es, en esencia, un dispositivo que ayuda a un robot a comprender el mundo que lo rodea. Lo hace recopilando e informando datos sobre su entorno, que luego se pueden usar en un proyecto para que el robot tome decisiones o realice ciertos comportamientos. Esta secuencia puede considerarse como un bucle de decisión de Sense → Think → Act.
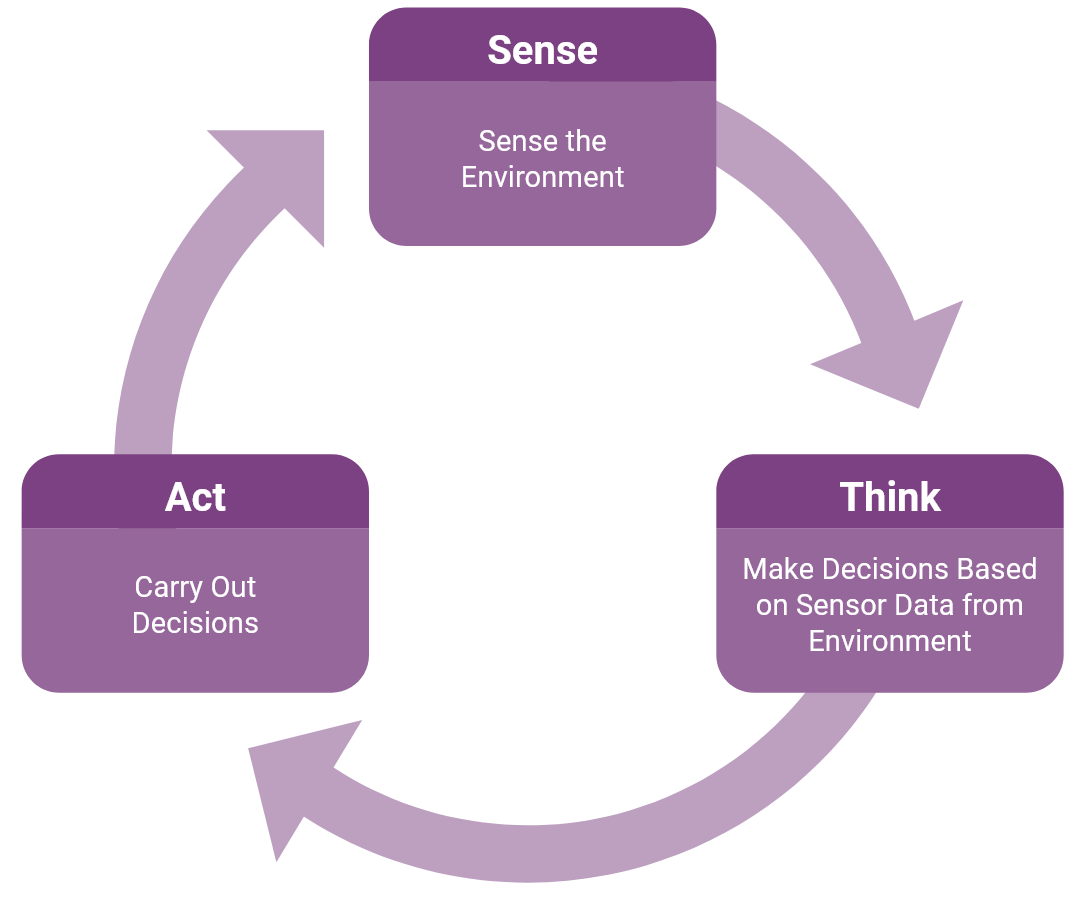 Ciclo de decisión → de
Ciclo de decisión → de En esta Unidad, el Robot 123 detectará objetos en el Campo 123 para ayudar a despejar el área para un aterrizaje seguro del rover. El proyecto que crean los estudiantes lleva a cabo este bucle, ya que el sensor ocular detectará la presencia de un objeto, luego el código VEX 123 ordena pensar y tomar decisiones en función de si el sensor ocular detecta un objeto o no, y luego el robot 123 actuará haciendo que el botón del robot brille.
¿Qué es el sensor ocular?
El sensor ocular del robot 123 se encuentra en el lado frontal, debajo de la flecha blanca. El sensor ocular se puede utilizar para detectar la presencia o ausencia de un objeto, así como su color o nivel de brillo.

El sensor ocular utiliza luz infrarroja para detectar objetos. Los objetos de color claro reflejan la luz infrarroja y son detectados más fácilmente por el sensor ocular. Los objetos de color oscuro absorben la luz infrarroja y el sensor ocular tampoco los detecta. Durante la unidad, use papel blanco o de color claro para los obstáculos para asegurarse de que el sensor ocular pueda detectar estos objetos.
En esta unidad, el sensor ocular se utilizará para detectar cuando un objeto está presente en la trayectoria del robot 123. La posición del sensor ocular en el robot 123 significa que solo puede detectar objetos directamente frente a él. Tenga esto en cuenta cuando coloque sus 123 robots y obstáculos con sus estudiantes para que los materiales preparen a los estudiantes para el éxito.
Para obtener más información sobre cómo codificar el sensor ocular con VEXcode 123, consulte el artículo Codificación del sensor ocular VEX 123 con VEXcode 123 VEX Library.
¿Qué es VEXcode 123?
VEXcode 123 es un lenguaje de programación basado en bloques utilizado con el Robot 123. Un lenguaje de programación es un conjunto de reglas en las que los símbolos representan acciones. Los lenguajes de programación siguen instrucciones paso a paso que un ordenador ejecuta para que se ejecute un proyecto.
Para obtener más información sobre cómo trabajar con VEXcode 123, consulte la Sección VEXcode 123 de la Biblioteca VEX.
¿Qué bloques de VEXcode 123 necesita?
Los bloques en VEXcode 123 representan 123 comandos Robot que se utilizan para crear un proyecto en VEXcode 123. A continuación se muestra una lista de los principales bloques utilizados durante esta Unidad.
| Código VEX 123 bloques | Comportamientos |
|---|---|
 |
El {When started} bloque comienza a ejecutar la pila de bloques adjunta cuando se inicia el proyecto. |
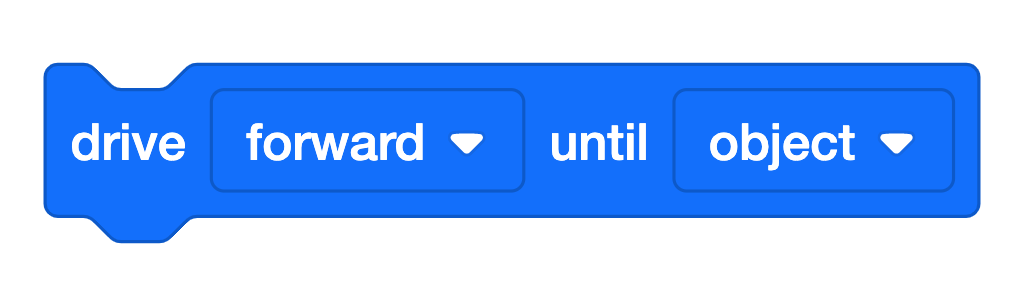 |
El bloque [Drive until] acciona el Robot 123 hasta que se cumpla una de las tres condiciones.
|
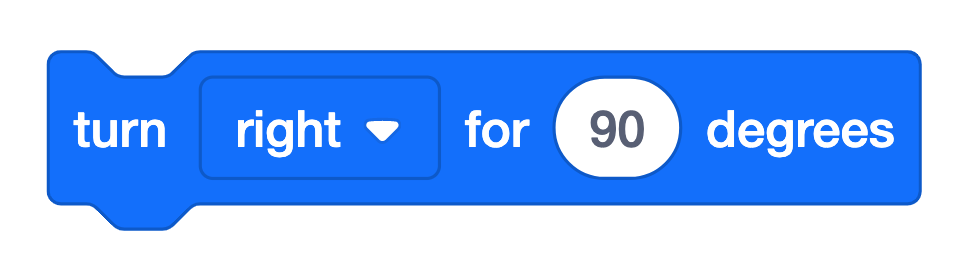 |
El bloque [Turn for] gira el 123 Robot en su lugar hacia la izquierda o la derecha durante un número específico de grados. |
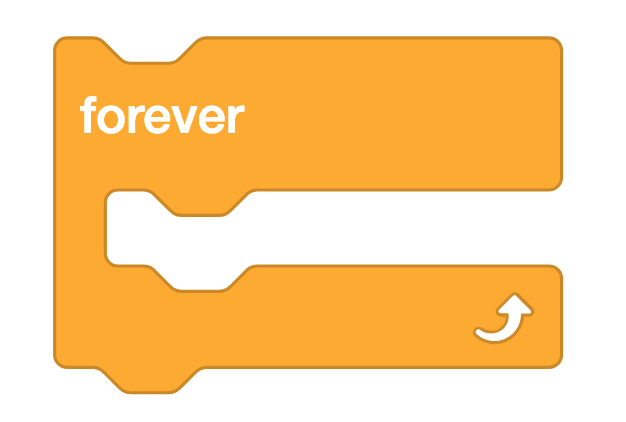 |
El bloque [Forever] repite cualquier bloque contenido dentro de la ‘C’ para siempre. |
![[Esperar] bloque](/stemlabs/sites/default/files/inline-images/%5BWait%5D.png) |
El bloque [Esperar] espera una cantidad específica de tiempo antes de pasar al siguiente bloque en un proyecto. |
 |
El bloque [Brillo] establece el color de brillo de la luz indicadora en el centro del Robot 123. |
¿Cómo funciona el bloque [Drive until]?
Los bloques [Drive until] comprueban repetidamente una condición y controlan el flujo del proyecto. Un proyecto no se moverá al siguiente bloque de la pila hasta que se cumpla la condición del bloque [Drive until]. En el proyecto que se muestra a continuación, el robot 123 avanzará y verificará continuamente si el sensor ocular ha detectado un objeto. Una vez que el sensor ocular detecta un objeto, el robot 123 dejará de conducir y pasará al siguiente bloque, un bloque [Glow].
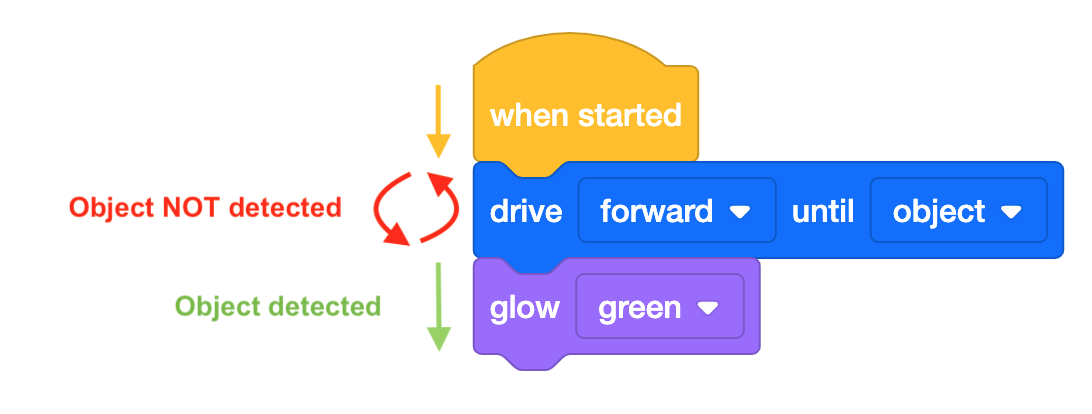
Se puede configurar la condición que detendrá la conducción del 123 Robot. Esta unidad utiliza el parámetro "objeto" para que el robot deje de funcionar cuando el sensor ocular en la parte delantera del 123 Robot detecte un objeto.
![Bloque [Drive until] con el menú desplegable de parámetros mostrado. Las opciones son objeto, choque y línea. La elección del objeto se resalta con una marca de verificación negra.](/stemlabs/sites/default/files/inline-images/Drive%20until%20with%20parameters.png)
Preparación para el Desafío Abierto en esta Unidad
En esta Unidad, se les pedirá a los estudiantes que usen lo que han aprendido previamente para crear un proyecto para resolver un desafío. Debido a que es importante desafiar regularmente a los estudiantes a resolver problemas y aplicar las habilidades que han estado aprendiendo de una nueva manera, lo alentamos a desafiar a sus estudiantes y usar estas estrategias para desarrollar resiliencia y ayudarlos a guiarlos a través del desafío. Aquí hay algunas sugerencias para ayudar a los estudiantes a experimentar con sus proyectos:
Dar retroalimentación sin dar la solución - Se espera y se alienta cometer errores mientras se trabaja en un desafío. "Los errores en el aprendizaje pueden crear oportunidades, [y] pueden ayudar a realizar conexiones".1 Crear un proceso familiar de resolución de problemas con sus alumnos puede ayudarlos a saber cómo identificar un problema y avanzar cuando cometen un error, minimizando así la interrupción y la frustración. Intente usar el siguiente ciclo de resolución de problemas con sus estudiantes para ayudarlos a resolver sus proyectos y encontrar sus propias soluciones.
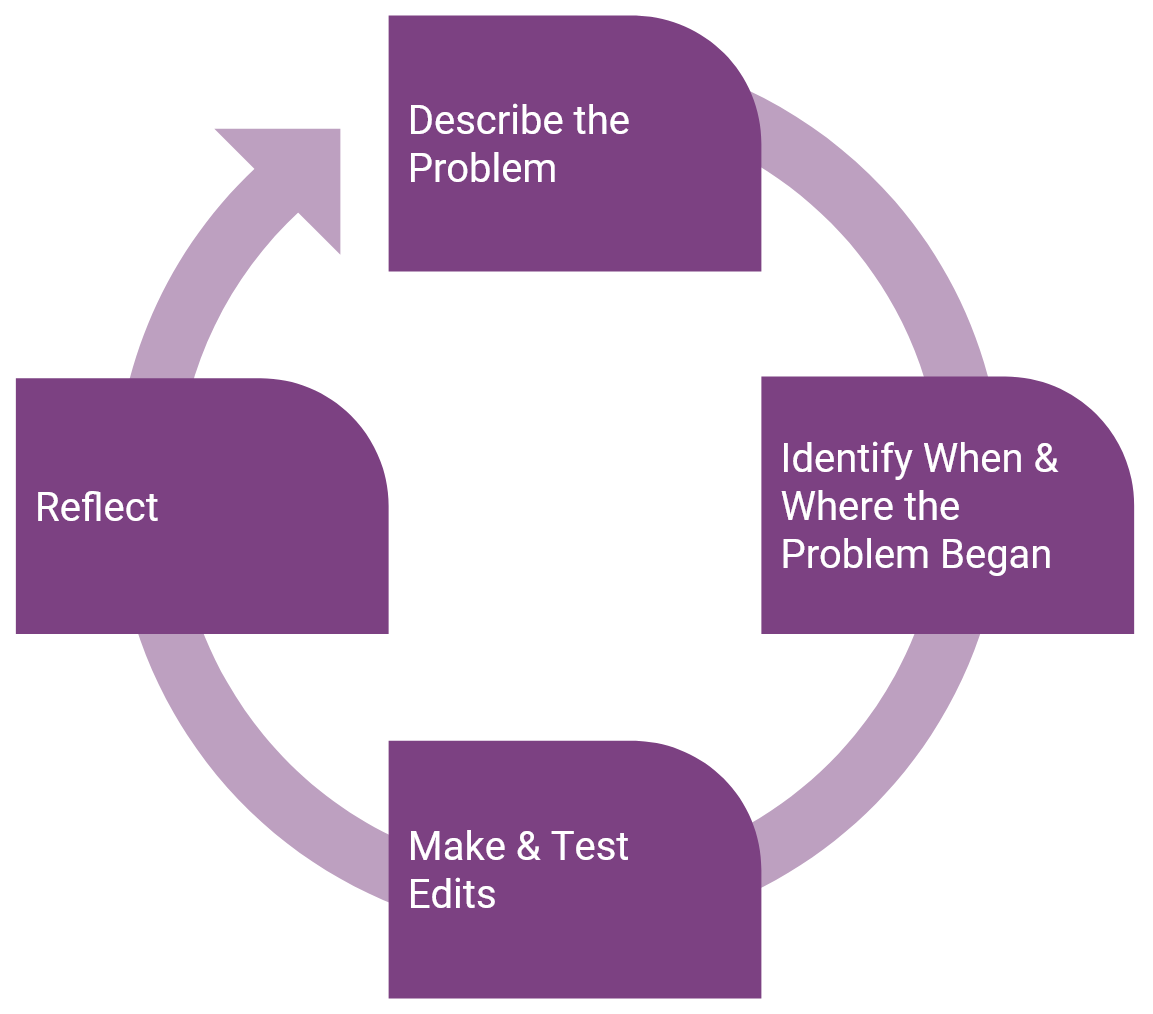
- Describe el problema
- Pídale al estudiante que explique lo que está mal. Los estudiantes deben ser capaces de
relacionar el error con el objetivo compartido o el desafío en cuestión.
- ¿Cómo se mueve el Robot 123 en su proyecto? ¿Cómo debería moverse el robot?
- Pídale al estudiante que explique lo que está mal. Los estudiantes deben ser capaces de
relacionar el error con el objetivo compartido o el desafío en cuestión.
- Identificar cuándo y dónde comenzó el problema
- Pregúntele al estudiante cuándo notó el problema por primera vez.
- ¿Qué parte del proyecto se estaba ejecutando?
- Si los estudiantes tienen dificultades para determinar en qué parte del proyecto se encuentra el error, anímelos a usar la función Project Stepping en VEXcode 123. Las señales visuales proporcionadas con la función Project Stepping se pueden usar para ayudar a los estudiantes a resolver problemas de su proyecto al tener la capacidad de ver los bloques que se ejecutan de uno en uno. Esto les dará una mejor visión de qué bloques pueden estar causando el error, por lo que la depuración puede convertirse en un proceso más específico y eficiente. Para obtener más información sobre cómo usar la función Project Stepping, consulte el artículo Stepping Through a Project en VEXcode 123 VEX Library.
- Pregúntele al estudiante cuándo notó el problema por primera vez.
- Realizar ediciones & de prueba
- A medida que los estudiantes encuentren un error, deben realizar modificaciones en su proyecto. Los estudiantes pueden probar el proyecto con cada edición realizada. Si el proyecto tiene éxito, pueden pasar al siguiente paso en el ciclo de resolución de problemas. Si el proyecto no tiene éxito, pueden volver al principio del proceso e intentarlo de nuevo.
- Reflexionar
- Pida a los estudiantes que piensen en el error que cometieron y superaron durante el proceso.
- ¿Cuál fue el error? ¿Qué has aprendido de este error? ¿Cómo puede ayudarte a la hora de codificar el Robot 123 la próxima vez?
- Anime a los estudiantes a reconocer sus errores y lo que aprendieron del proceso para ayudar a fomentar una mentalidad de crecimiento. Un fuerte énfasis en una mentalidad de crecimiento puede ayudar a los estudiantes a aprender cuándo y cómo persistir y también cuándo pedir ayuda.2 Si los estudiantes pueden ver su proceso como un precursor de un nuevo aprendizaje, entonces pueden usar los pasos aquí para avanzar en su propio aprendizaje, así como para promover el aprendizaje de sus compañeros de clase. A medida que los estudiantes se encuentren con estos problemas y reflexionen sobre sus errores, anímelos a compartir sus errores y procesarlos con sus compañeros. De esta manera, los estudiantes pueden convertirse en "recursos de aprendizaje entre sí"3.
- Pida a los estudiantes que piensen en el error que cometieron y superaron durante el proceso.
Despejar el Área de Aterrizaje (Laboratorio 2) está diseñado para ser una exploración abierta que pedirá a sus estudiantes que perseveren para resolver un desafío. En este laboratorio, presentamos bucles con el bloque [Forever] y pedimos a los estudiantes que experimenten con el uso de bucles en su proyecto para que el 123 Robot conduzca y detecte todos los obstáculos en el área de aterrizaje (VEX 123 Field). Si el uso de bucles en un proyecto es nuevo para sus estudiantes, puede tomar varias iteraciones de sus proyectos para usar bucles de manera efectiva. Utilice las sugerencias descritas en esta sección para preparar a los estudiantes para el proceso de prueba y error, y para ayudarlos a solucionar sus proyectos para lograr el objetivo del desafío. La sección de Facilitación de Play Part 1 y 2 contiene apoyos de instrucción adicionales para guiar a los alumnos a través del desafío Lab 2. Tener un plan sobre cómo brindará apoyo para la resolución de problemas y el ensayo y error que se requiere en este laboratorio puede ayudarlo a satisfacer las necesidades individuales de sus alumnos.
Consulte el artículo de la Biblioteca VEX de Building Resilience in STEM Labs para obtener más información sobre cómo los comentarios efectivos pueden ayudar a los estudiantes a desarrollar resiliencia y una mentalidad de crecimiento mientras trabajan en STEM Labs.
1 Hattie, John y Shirley Clarke. Aprendizaje visible: comentarios. Routledge, Taylor & Francis Group, 2019.
2 Ibíd.
3 Ibíd., pág. 121