
Hintergrund
Die Mars Rover: Landing Challenge Unit fordert Ihre Schüler auf, VEXcode 123-Projekte zu erstellen, um ein Problem zu lösen. Diese Einheit führt die Schüler in die Verwendung des Augensensors auf der Vorderseite des 123 Roboters in einer Herausforderung ein, die von dem Prozess inspiriert ist, den Wissenschaftler verwenden, wenn sie versuchen, Raumfahrzeuge wie den Mars 2020 Perseverance Rover zu landen. Die Schüler codieren den 123-Roboter, um ein Hindernis zu erkennen, und leuchten dann eine Farbe, um anzuzeigen, dass ein Hindernis auf dem Landeplatz gefunden wurde.
Die Mars-2020-Mission der NASA
Die Mars 2020 Mission der NASA adressiert wissenschaftliche Ziele mit hoher Priorität für die Erforschung des Mars: Leben, Klima, Geologie und Menschen. Aber bevor der Perseverance-Rover seine Mission beginnen kann, Gesteins- und Bodenproben auf der Oberfläche zu sammeln, muss der Rover sicher auf dem Roten Planeten landen.
Laut NASA waren nur etwa 40 % der Missionen, die jemals (von einer Weltraumbehörde) zum Mars geschickt wurden, erfolgreich. Der gesamte Prozess von Eintritt, Abstieg und Landung dauert nur wenige Minuten, aber das Raumschiff, das den Perseverance-Rover trägt, muss von fast 20.000 km/h (~12.500 Meilen pro Stunde) auf Null verlangsamen und einen offenen, flachen Bereich zum Landen finden. Die Marsoberfläche ist voller Hindernisse — massive Einschlagskrater, Klippen, Risse und zerklüftete Felsbrocken. Unvorhersehbare Winde können auch weitere Komplikationen verursachen.

Um eine sichere Landung zu gewährleisten, nimmt der Perseverance-Rover beim Abstieg Bilder auf und vergleicht diese Bilder mit den Karten. Es kann schnell entscheiden, ob dieses Gebiet von Wissenschaftlern als gefährlich eingestuft wurde, und Anpassungen vornehmen, um in einem offenen Gebiet zu landen. Sehen Sie sich das Video unten an, um zu sehen, wie der Rover voraussichtlich landen wird.
In dieser Einheit werden die Schüler den 123-Roboter programmieren, um Hindernisse an den Landeplätzen auf ihren 123-Feldern zu erkennen, um eine sichere Landung für den Rover zu gewährleisten.
Was ist ein Sensor?
Ein Sensor ist im Wesentlichen ein Gerät, das einem Roboter hilft, die Welt um ihn herum zu verstehen. Dies geschieht durch das Sammeln und Berichten von Daten über seine Umgebung, die dann in einem Projekt verwendet werden können, um Entscheidungen zu treffen oder bestimmte Verhaltensweisen auszuführen. Diese Sequenz kann als Sense → Think Act-Entscheidungsschleife → betrachtet werden.
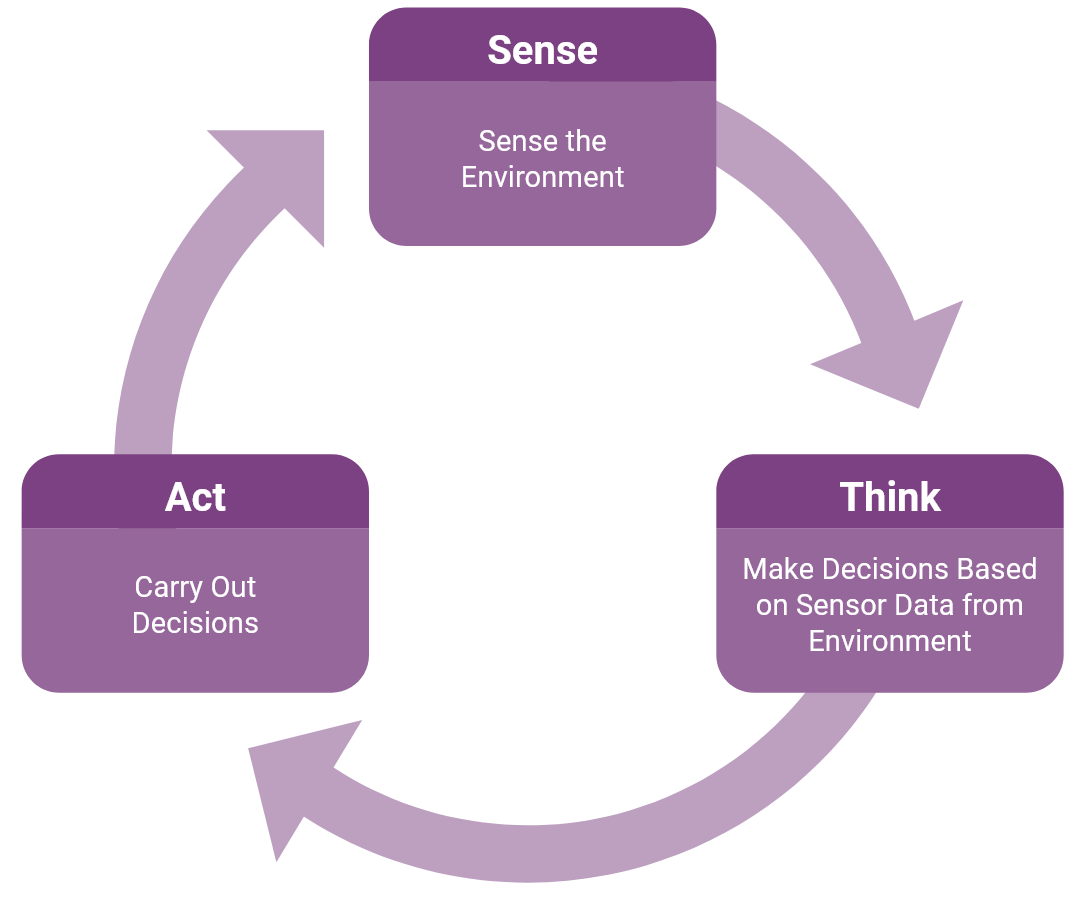
In dieser Einheit erkennt der 123-Roboter Objekte auf dem 123-Feld, um den Bereich für eine sichere Rover-Landung zu räumen. Die Projektstudenten erstellen diese Schleife, da der Augensensor die Anwesenheit eines Objekts erkennt , dann befiehlt der VEXcode 123 zu denken und Entscheidungen zu treffen, basierend darauf, ob der Augensensor ein Objekt erkennt oder nicht, und dann reagiert der 123-Roboter, indem er die Taste auf dem Roboter leuchten lässt.
Was ist der Augensensor?
Der Augensensor des 123 Roboters befindet sich auf der nach vorne gerichteten Seite unter dem weißen Pfeil. Der Augensensor kann verwendet werden, um die Anwesenheit oder Abwesenheit eines Objekts sowie dessen Farbe oder Helligkeitsstufe zu erkennen.

Der Augensensor verwendet Infrarotlicht, um Objekte zu erkennen. Helle Objekte reflektieren Infrarotlicht und werden vom Augensensor leichter erkannt. Dunkle Objekte absorbieren Infrarotlicht und der Augensensor erkennt sie auch nicht. Verwenden Sie während des Geräts weißes oder helles Papier für die Hindernisse, um sicherzustellen, dass der Augensensor diese Objekte erkennen kann.
In dieser Einheit wird der Augensensor verwendet, um zu erkennen, wenn sich ein Objekt im Pfad des 123 Roboters befindet. Die Position des Augensensors am 123 Robot bedeutet, dass er nur Objekte direkt davor erkennen kann. Achten Sie darauf, wenn Sie Ihre 123 Roboter und Hindernisse bei Ihren Schülern platzieren, damit die Materialien die Schüler auf den Erfolg vorbereiten.
Weitere Informationen zum Codieren des Augensensors mit VEXcode 123 finden Sie im Artikel Codieren des vex 123 Augensensors mit VEXcode 123 vex Library.
Was ist VEXcode 123?
VEXcode 123 ist eine blockbasierte Programmiersprache, die mit dem 123 Robot verwendet wird. Eine Programmiersprache ist eine Reihe von Regeln, in denen Symbole Aktionen darstellen. Programmiersprachen folgen Schritt-für-Schritt-Anweisungen, die ein Computer ausführt, damit ein Projekt ausgeführt werden kann.
Weitere Informationen zum Arbeiten mit VEXcode 123 finden Sie im Abschnitt VEXcode 123 der VEX-Bibliothek.
Welche VEXcode 123-Blöcke benötigen Sie?
Die Blöcke in VEXcode 123 repräsentieren 123 Roboterbefehle, die zum Erstellen eines Projekts in VEXcode 123 verwendet werden. Nachfolgend finden Sie eine Liste der Hauptblöcke, die während dieser Einheit verwendet werden.
| VEXcode 123 Blöcke | Verhaltensweisen |
|---|---|
 |
Der {When started} Block beginnt mit dem Ausführen des angehängten Blockstapels, wenn das Projekt gestartet wird. |
 |
Der Block [Fahren bis] treibt den 123-Roboter an, bis eine von drei Bedingungen erfüllt ist.
|
 |
Der [Drehen für] -Block dreht den 123-Roboter für eine bestimmte Anzahl von Grad nach links oder rechts. |
 |
Der [Forever] -Block wiederholt alle Blöcke, die im ‘C‘ enthalten sind, für immer. |
![Block [Warten]](/stemlabs/sites/default/files/inline-images/%5BWait%5D.png) |
Der Block [Warten] wartet eine bestimmte Zeit, bevor er zum nächsten Block in einem Projekt wechselt. |
 |
Der [Glow] -Block stellt die Glühfarbe der Kontrollleuchte in der Mitte des 123 Roboters ein. |
Wie funktioniert der Block [Fahren bis]?
[Fahren bis] Blöcke überprüfen wiederholt einen Zustand und steuern den Projektablauf. Ein Projekt wird nicht zum nächsten Block im Stapel verschoben, bis die Bedingung des [Drive until] -Blocks erfüllt ist. In dem unten gezeigten Projekt fährt der 123 Roboter vorwärts und überprüft kontinuierlich, ob der Augensensor ein Objekt erkannt hat. Sobald ein Objekt vom Augensensor erkannt wird, stoppt der 123-Roboter die Fahrt und fährt zum nächsten Block, einem [Glow] -Block.
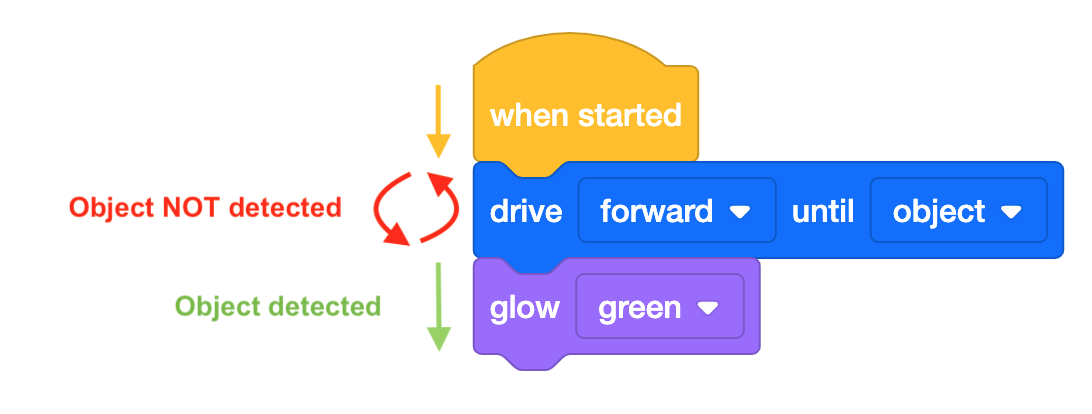
Die Bedingung, die die 123 Roboterfahrt stoppt, kann eingestellt werden. Dieses Gerät verwendet den Parameter "Objekt", sodass der Roboter die Fahrt stoppt, wenn der Augensensor auf der Vorderseite des 123 Roboters ein Objekt erkennt.
![Block [Fahren bis] mit dem angezeigten Parameter-Dropdown. Die Auswahlmöglichkeiten sind Objekt, Absturz und Linie. Die Objektauswahl wird mit einem schwarzen Häkchen hervorgehoben.](/stemlabs/sites/default/files/inline-images/Drive%20until%20with%20parameters.png)
Vorbereitung auf die offene Herausforderung in dieser Einheit
In dieser Einheit werden die Schüler gebeten, das zuvor Gelernte zu verwenden, um ein Projekt zur Lösung einer Herausforderung zu erstellen. Da es wichtig ist, die Schüler regelmäßig herauszufordern, Probleme zu lösen und die erlernten Fähigkeiten auf neue Weise anzuwenden, ermutigen wir Sie, Ihre Schüler herauszufordern und diese Strategien zu nutzen, um Resilienz aufzubauen und sie durch die Herausforderung zu führen. Hier sind ein paar Vorschläge, die den Schülern beim Experimentieren mit ihren Projekten helfen:
Geben Sie Feedback, ohne die Lösung zu geben - Fehler während der Arbeit an einer Herausforderung werden erwartet und gefördert. „Fehler beim Lernen können Chancen schaffen, [und] dazu beitragen, Verbindungen herzustellen.“1 Die Schaffung eines vertrauten Problemlösungsprozesses mit Ihren Schülern kann ihnen helfen, zu wissen, wie sie ein Problem erkennen und vorankommen können, wenn sie einen Fehler machen, wodurch Störungen und Frustration minimiert werden. Versuchen Sie, den folgenden Problemlösungszyklus mit Ihren Schülern zu verwenden, um ihnen bei der Fehlerbehebung ihrer Projekte zu helfen und ihre eigenen Lösungen zu finden.
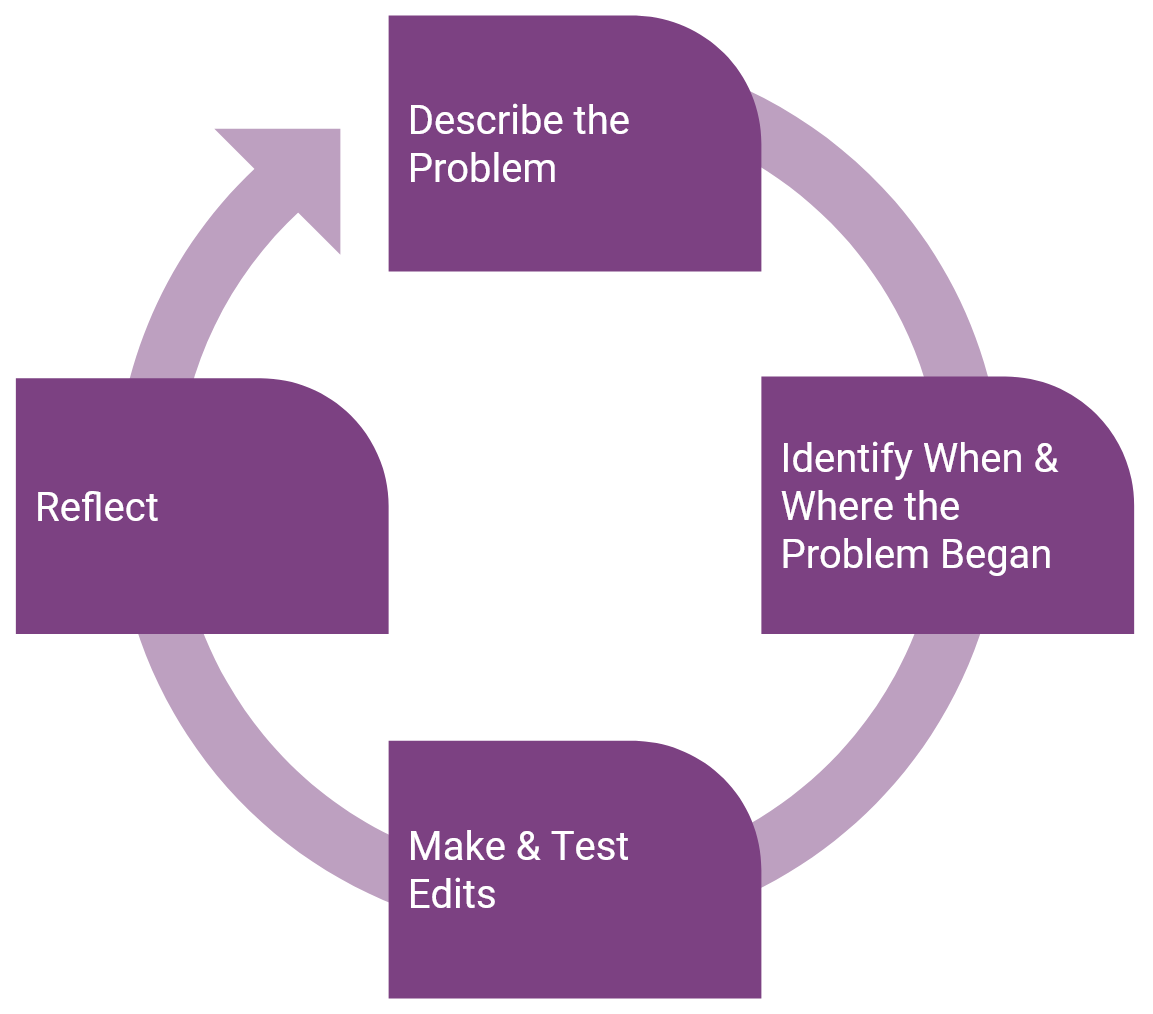
- Beschreiben Sie das Problem
- Bitten Sie den Schüler, zu erklären, was falsch ist. Die Schüler sollten in der Lage sein,
den Fehler mit dem gemeinsamen Ziel oder der Herausforderung in Verbindung zu bringen.
- Wie bewegt sich der 123-Roboter in seinem Projekt? Wie sollte sich der Roboter bewegen?
- Bitten Sie den Schüler, zu erklären, was falsch ist. Die Schüler sollten in der Lage sein,
den Fehler mit dem gemeinsamen Ziel oder der Herausforderung in Verbindung zu bringen.
- Identifizieren, wann und wo das Problem begann
- Fragen Sie den Schüler, wann er das Problem zum ersten Mal bemerkt hat.
- Welcher Teil des Projekts wurde ausgeführt?
- Wenn die Schüler Schwierigkeiten haben, festzustellen, wo sich der Fehler im Projekt befindet, empfehlen Sie ihnen, die Projektschrittfunktion in VEXcode 123 zu verwenden. Die visuellen Hinweise, die mit der Projektschrittfunktion bereitgestellt werden, können verwendet werden, um den Schülern bei der Fehlerbehebung ihres Projekts zu helfen, indem sie die Möglichkeit haben, die jeweils ausgeführten Blöcke zu sehen. Dadurch erhalten sie ein besseres Bild davon, welche Blöcke den Fehler verursachen können, sodass das Debuggen zu einem gezielteren und effizienteren Prozess werden kann. Weitere Informationen zur Verwendung der Project Stepping-Funktion finden Sie im Artikel Stepping Through a Project in VEXcode 123 vex Library.
- Fragen Sie den Schüler, wann er das Problem zum ersten Mal bemerkt hat.
- Testbearbeitungen & vornehmen
- Wenn die Schüler einen Fehler finden, sollten sie Änderungen an ihrem Projekt vornehmen. Die Schüler können das Projekt mit jeder vorgenommenen Bearbeitung testen. Wenn das Projekt erfolgreich ist, können sie mit dem nächsten Schritt im Problemlösungszyklus fortfahren. Wenn das Projekt nicht erfolgreich ist, können sie zum Anfang des Prozesses zurückkehren und es erneut versuchen.
- Reflektieren
- Bitten Sie die Schüler, über den Fehler nachzudenken, den sie während des Prozesses gemacht und
überwunden haben.
- Was war der Fehler? Was haben Sie aus diesem Fehler gelernt? Wie kann es Ihnen beim nächsten Programmieren des 123 Roboters helfen?
- Ermutigen Sie die Schüler, ihre Fehler und das, was sie aus dem Prozess gelernt haben, zu erkennen, um eine Wachstumsmentalität zu fördern. Eine starke Betonung einer Wachstumsmentalität kann den Schülern helfen, zu lernen, wann und wie sie durchhalten und auch wann sie um Hilfe bitten müssen.2 Wenn die Schüler ihren Prozess als Vorläufer für neues Lernen sehen, können sie die hier beschriebenen Schritte nutzen, um ihr eigenes Lernen sowie das Lernen ihrer Klassenkameraden zu fördern. Wenn die Schüler auf diese Probleme stoßen und über ihre Fehler nachdenken, ermutigen Sie sie, ihre Fehler und ihren Prozess mit Mitschülern zu teilen. Auf diese Weise können die Schüler „Lernressourcen füreinander“3 werden.
- Bitten Sie die Schüler, über den Fehler nachzudenken, den sie während des Prozesses gemacht und
überwunden haben.
Clear the Landing Area (Lab 2) ist als offene Erkundung konzipiert, bei der Ihre Schüler aufgefordert werden, eine Herausforderung beharrlich zu lösen. In diesem Lab stellen wir Loops mit dem Block [Forever] vor und bitten die Schüler, mit der Verwendung von Loops in ihrem Projekt zu experimentieren, damit der 123 Robot alle Hindernisse auf dem Landeplatz (vex 123 Field) ansteuert und erkennt. Wenn die Verwendung von Schleifen in einem Projekt für Ihre Schüler neu ist, kann es mehrere Iterationen ihrer Projekte erfordern, um Schleifen effektiv zu verwenden. Verwenden Sie die in diesem Abschnitt beschriebenen Vorschläge, um die Schüler auf den Trial-and-Error-Prozess vorzubereiten und ihnen bei der Fehlerbehebung bei ihren Projekten zu helfen, um das Ziel der Herausforderung zu erreichen. Der Abschnitt Moderation von Spiel Teil 1 und 2 enthält zusätzliche Unterrichtsunterstützungen, um die Schüler durch die Lab 2-Herausforderung zu führen. Wenn Sie einen Plan haben, wie Sie die in diesem Labor erforderliche Problemlösung und das Ausprobieren unterstützen, können Sie die individuellen Bedürfnisse Ihrer Schüler erfüllen.
Weitere Informationen darüber, wie effektives Feedback den Schülern helfen kann, Resilienz und eine Wachstumsmentalität aufzubauen, während SIE durch STEM Labs arbeiten, finden Sie im Artikel Building Resilience in STEM LABS VEX Library.
1 Hattie, John und Shirley Clarke. Sichtbares Lernen: Feedback. Routledge, Taylor & Francis Group, 2019.
2 Ebd.
3 Ebenda, S. 121