
ภูมิหลัง
Mars Rover: Landing Challenge Unit จะท้าทายนักเรียนของคุณในการสร้างโครงการ VEXcode 123 เพื่อแก้ปัญหา หน่วยนี้แนะนำให้นักเรียนรู้จักกับการใช้เซ็นเซอร์ตรวจจับดวงตาที่ด้านหน้าของหุ่นยนต์ 123 ในความท้าทายซึ่งได้รับแรงบันดาลใจจากกระบวนการที่นักวิทยาศาสตร์ใช้ในขณะที่พยายามลงจอดยานอวกาศเช่นยานสำรวจความเพียรดาวอังคาร 2020 นักเรียนจะกำหนดรหัสหุ่นยนต์ 123 ตัวเพื่อตรวจจับสิ่งกีดขวางจากนั้นเรืองแสงสีเพื่อระบุว่าพบสิ่งกีดขวางบนไซต์ลงจอด
ภารกิจ Mars 2020 ของนาซา
ภารกิจ Mars 2020 ของนาซากล่าวถึงเป้าหมายทางวิทยาศาสตร์ที่มีความสำคัญสูงสำหรับการสำรวจดาวอังคารได้แก่สิ่งมีชีวิตสภาพภูมิอากาศธรณีวิทยาและมนุษย์ แต่ก่อนที่ยานสำรวจความเพียรจะเริ่มภารกิจรวบรวมตัวอย่างหินและดินบนพื้นผิวยานสำรวจจำเป็นต้องลงจอดอย่างปลอดภัยบนดาวเคราะห์สีแดง
ตามข้อมูลของนาซามีเพียง 40% ของภารกิจที่เคยส่งไปยังดาวอังคาร (โดยหน่วยงานอวกาศใดๆ) ที่ประสบความสำเร็จ กระบวนการทั้งหมดของการเข้าลงและลงจอดจะใช้เวลาเพียงไม่กี่นาทีแต่ยานอวกาศที่บรรทุกยานสำรวจความเพียรจำเป็นต้องชะลอความเร็วจากเกือบ 20,000 กม. ต่อชั่วโมง (~ 12,500 ไมล์ต่อชั่วโมง) เป็นศูนย์และหาพื้นที่เปิดโล่งและราบเรียบเพื่อลงจอด พื้นผิวมาร์ตินเต็มไปด้วยสิ่งกีดขวาง — หลุมอุกกาบาตขนาดใหญ่หน้าผารอยแตกและก้อนหินขรุขระ ลมที่ไม่สามารถคาดเดาได้ยังสามารถกระตุ้นภาวะแทรกซ้อนเพิ่มเติมได้

เพื่อช่วยให้ลงจอดได้อย่างปลอดภัย Perseverance rover จะถ่ายภาพขณะลงและเปรียบเทียบภาพเหล่านั้นกับแผนที่ มันสามารถตัดสินใจได้อย่างรวดเร็วว่าพื้นที่นั้นถูกกำหนดให้เป็นอันตรายโดยนักวิทยาศาสตร์และทำการปรับที่ดินในพื้นที่เปิดโล่งหรือไม่ ดูวิดีโอด้านล่างเพื่อดูว่ายานสำรวจคาดว่าจะลงจอดอย่างไร
ในหน่วยนี้นักเรียนจะได้รับการเข้ารหัสหุ่นยนต์ 123 เพื่อตรวจหาสิ่งกีดขวางที่จุดลงจอดในฟิลด์ 123 ของพวกเขาเพื่อช่วยให้แน่ใจว่าการลงจอดอย่างปลอดภัยสำหรับยานสำรวจ
เซ็นเซอร์คืออะไร?
โดยพื้นฐานแล้วเซ็นเซอร์เป็นอุปกรณ์ที่ช่วยให้หุ่นยนต์เข้าใจโลกรอบตัว โดยทำเช่นนี้โดยการรวบรวมและรายงานข้อมูลเกี่ยวกับสภาพแวดล้อมซึ่งสามารถใช้ในโครงการเพื่อตัดสินใจหรือทำพฤติกรรมบางอย่าง ลำดับนี้สามารถคิดได้ว่าเป็นวังวนการตัดสินใจของ Sense → Think → Act
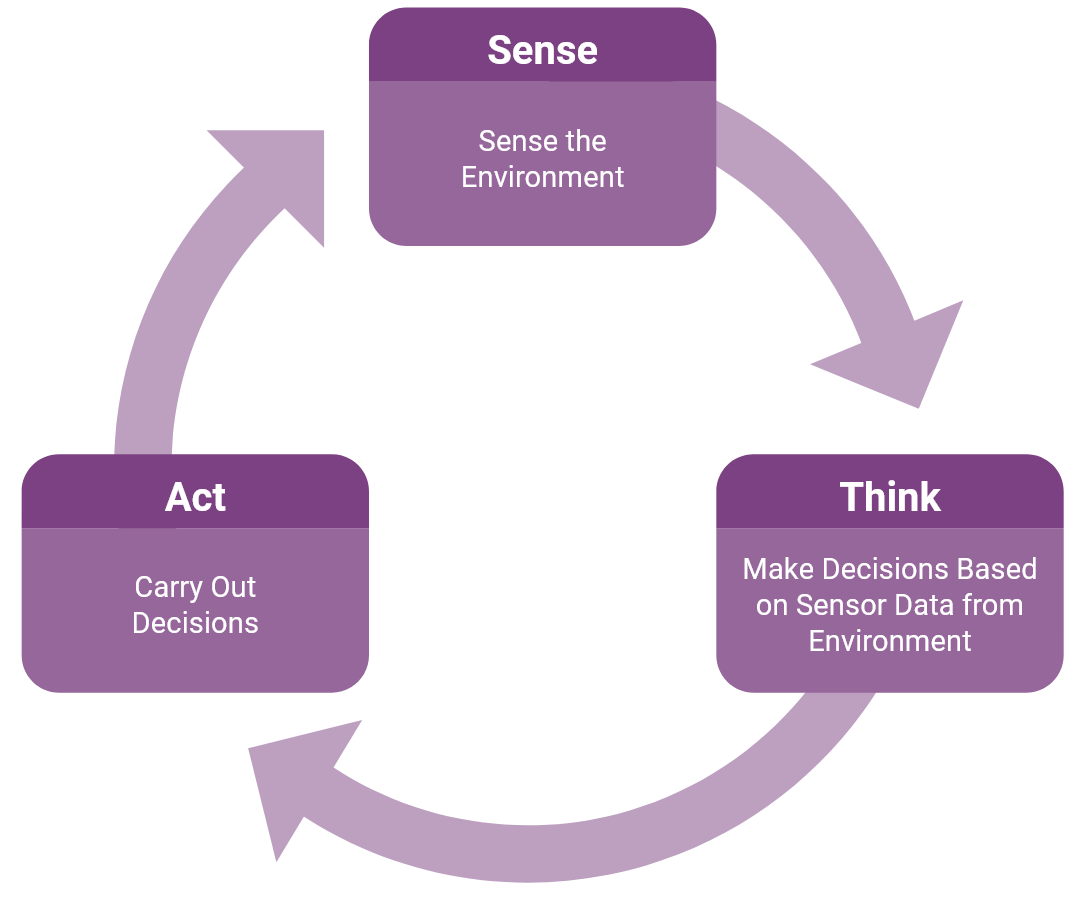
ในหน่วยนี้หุ่นยนต์ 123 จะตรวจจับวัตถุบนสนาม 123 เพื่อช่วยเคลียร์พื้นที่สำหรับการลงจอดยานสำรวจที่ปลอดภัย โปรเจกต์ที่นักเรียนสร้างขึ้นจะดำเนินการวนลูปนี้เนื่องจากเซ็นเซอร์ตรวจ จับดวงตาจะ รับรู้ถึงการมีอยู่ของวัตถุจากนั้นคำสั่ง VEXcode 123 จะ คิด และตัดสินใจโดยขึ้นอยู่กับว่าเซ็นเซอร์ตรวจจับดวงตาตรวจพบวัตถุหรือไม่จากนั้นหุ่นยนต์ 123 จะทำ หน้าที่ โดยมีปุ่มบนหุ่นยนต์เรืองแสง
เซ็นเซอร์ตรวจจับดวงตาคืออะไร?
เซ็นเซอร์ตรวจจับดวงตาบนหุ่นยนต์ 123 ตั้งอยู่ที่ด้านหน้าใต้ลูกศรสีขาว เซ็นเซอร์ตรวจจับดวงตาสามารถใช้เพื่อตรวจจับการมีอยู่หรือไม่มีอยู่ของวัตถุเช่นเดียวกับสีหรือระดับความสว่าง

เซ็นเซอร์ตรวจจับดวงตาใช้แสงอินฟราเรดในการตรวจจับวัตถุ วัตถุที่ มีสีอ่อนจะสะท้อนแสงอินฟราเรดและตรวจพบได้ง่ายขึ้นโดยเซ็นเซอร์ตรวจจับดวงตา วัตถุที่มีสีเข้มจะดูดซับแสงอินฟราเรดและเซ็นเซอร์ตรวจจับดวงตาไม่สามารถตรวจจับได้เช่นกัน ในระหว่างเครื่องใช้กระดาษสีขาวหรือสีอ่อนสำหรับสิ่งกีดขวางเพื่อให้แน่ใจว่าเซ็นเซอร์ตาจะสามารถตรวจจับวัตถุเหล่านี้ได้
ในหน่วยนี้เซ็นเซอร์ตาจะถูกใช้เพื่อตรวจจับเมื่อมีวัตถุอยู่ในเส้นทางของหุ่นยนต์ 123 ตำแหน่งของเซ็นเซอร์ตรวจจับดวงตาบนหุ่นยนต์ 123 หมายความว่ามันสามารถตรวจจับวัตถุที่อยู่ด้านหน้าได้โดยตรงเท่านั้น คำนึงถึงสิ่งนี้เมื่อคุณวางหุ่นยนต์ 123 ตัวและอุปสรรคกับนักเรียนของคุณเพื่อให้สื่อการเรียนการสอนสร้างความสำเร็จให้กับนักเรียน
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการเขียนโค้ดเซนเซอร์ตรวจจับดวงตาด้วย VEXcode 123 โปรดดูที่การเขียนโค้ดเซนเซอร์ตรวจจับดวงตา vex 123 โดยใช้บทความ VEXcode 123 vexLibrary
VEXcode 123 คืออะไร?
VEXcode 123 เป็นภาษาโปรแกรมแบบบล็อกที่ใช้กับหุ่นยนต์ 123 ภาษาโปรแกรมคือชุดของกฎที่มีสัญลักษณ์แสดงถึงการกระทำ ภาษาการเขียนโปรแกรมทำตามคำแนะนำทีละขั้นตอนที่คอมพิวเตอร์ดำเนินการเพื่อให้โปรเจกต์ทำงาน
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการทำงานกับ VEXcode 123 โปรดดูที่ส่วน VEXcode 123 ของไลบรารีVEX
คุณต้องการบล็อก VEXcode 123 อะไร?
บล็อกใน VEXcode 123 แทน 123 คำสั่งหุ่นยนต์ที่ใช้ในการสร้างโครงการใน VEXcode 123 ด้านล่างนี้เป็นรายการบล็อกหลักที่ใช้ในระหว่างหน่วยนี้
| บล็อก VEXcode 123 | พฤติกรรม |
|---|---|
 |
{When started} บล็อกจะเริ่มเรียกใช้กองบล็อกที่แนบมาเมื่อเริ่มโครงการ |
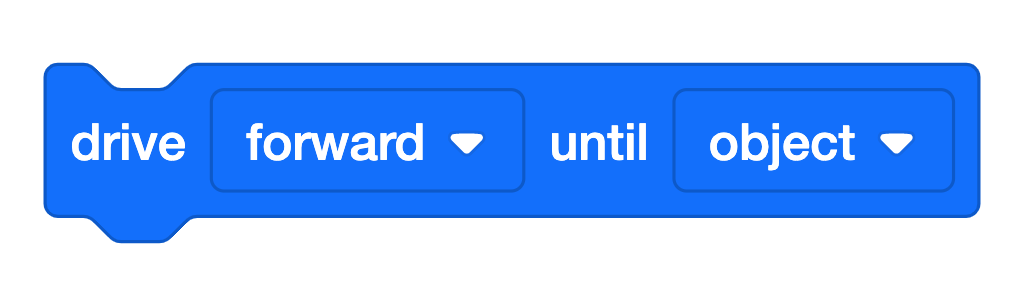 |
บล็อก [Drive until] ขับเคลื่อนหุ่นยนต์ 123 ตัวจนกว่าจะเป็นไปตามหนึ่งในสามเงื่อนไข
|
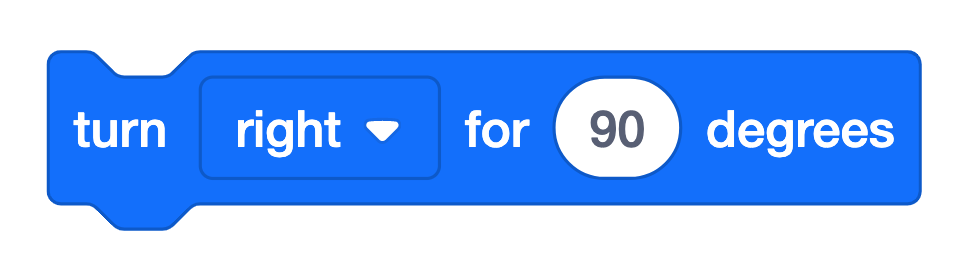 |
บล็อก [Turn for] จะหมุนหุ่นยนต์ 123 ตัวไปทางซ้ายหรือขวาตามจำนวนองศาที่กำหนด |
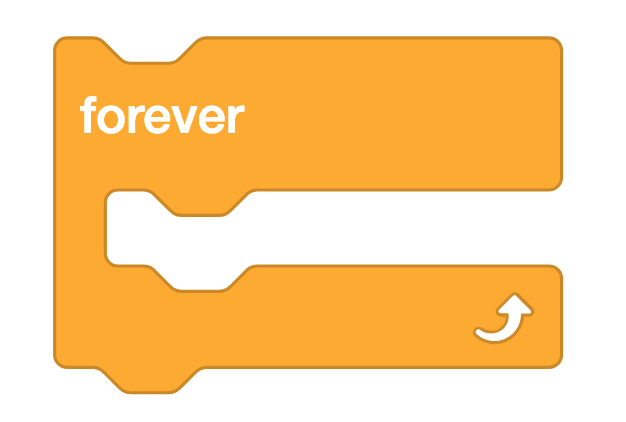 |
บล็อก [Forever] จะทำซ้ำบล็อกใดๆที่มีอยู่ภายใน ‘C’ ตลอดไป |
![บล็อก [รอ]](/stemlabs/sites/default/files/inline-images/%5BWait%5D.png) |
บล็อก [รอ] รอระยะเวลาที่กำหนดก่อนที่จะย้ายไปยังบล็อกถัดไปในโปรเจกต์ |
 |
บล็อก [เรืองแสง] จะตั้งค่าสีเรืองแสงของไฟแสดงสถานะที่อยู่ตรงกลางของหุ่นยนต์ 123 ตัว |
บล็อก [Drive until] ทำงานอย่างไร
[Drive until] บล็อคตรวจสอบเงื่อนไขและควบคุมการไหลของโปรเจกต์ซ้ำๆ โปรเจกต์จะไม่ย้ายไปยังบล็อกถัดไปในสแต็กจนกว่าจะตรงตามเงื่อนไขของบล็อก [Drive until] ในโครงการที่แสดงด้านล่างหุ่นยนต์ 123 จะขับเคลื่อนไปข้างหน้าและตรวจสอบอย่างต่อเนื่องว่าเซ็นเซอร์ตรวจจับดวงตาตรวจพบวัตถุหรือไม่ เมื่อตรวจพบวัตถุโดยเซนเซอร์ตรวจจับดวงตาหุ่นยนต์ 123 ตัวจะหยุดขับและย้ายไปยังบล็อกถัดไปบล็อก [เรืองแสง]
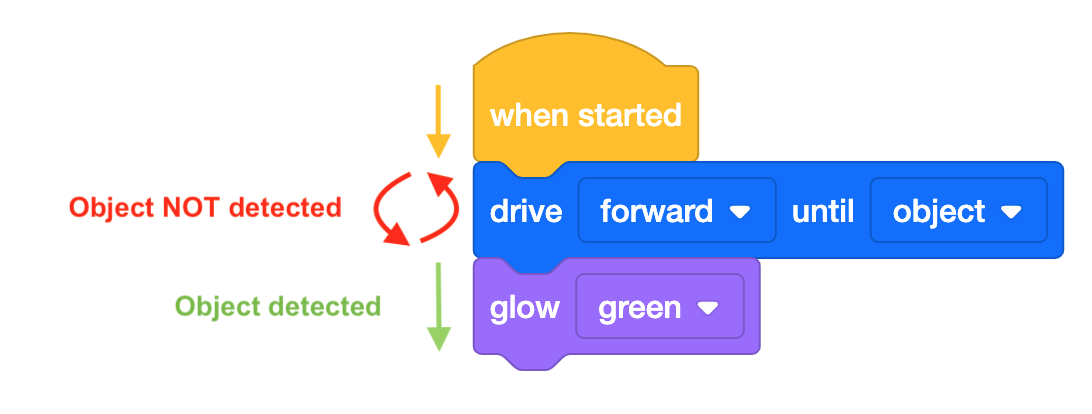
สามารถตั้งเงื่อนไขที่จะหยุดการขับขี่หุ่นยนต์ 123 ตัวได้ หน่วยนี้ใช้พารามิเตอร์ "วัตถุ" เพื่อให้หุ่นยนต์หยุดการขับขี่เมื่อเซ็นเซอร์ตรวจจับสายตาที่ด้านหน้าของหุ่นยนต์ 123 ตรวจพบวัตถุ
![[Drive until] block ที่มีพารามิเตอร์ดรอปดาวน์ปรากฏอยู่ ตัวเลือกคืออ็อบเจ็กต์, แครชและไลน์ ตัวเลือกวัตถุจะถูกเน้นด้วยเครื่องหมายถูกสีดำ](/stemlabs/sites/default/files/inline-images/Drive%20until%20with%20parameters.png)
การเตรียมตัวสำหรับการท้าทาย แบบเปิด ในยูนิตนี้
ในหน่วยนี้นักเรียนจะถูกขอให้ใช้สิ่งที่ได้เรียนรู้มาก่อนหน้านี้เพื่อสร้างโครงการเพื่อแก้ปัญหาความท้าทาย เนื่องจากเป็นสิ่งสำคัญที่จะท้าทายนักเรียนเป็นประจำในการแก้ปัญหาและใช้ทักษะที่พวกเขาได้เรียนรู้ในรูปแบบใหม่เราขอแนะนำให้คุณท้าทายนักเรียนของคุณและใช้กลยุทธ์เหล่านี้ เพื่อสร้างความยืดหยุ่นและ ช่วย แนะนำพวกเขาผ่านความท้าทาย ต่อไปนี้เป็นคำแนะนำบางประการที่จะช่วยนักเรียนในขณะที่พวกเขาทดลองกับโครงการของพวกเขา:
ให้ข้อเสนอแนะโดยไม่ต้องให้วิธีแก้ปัญหา - คาดว่าจะมีและสนับสนุนการ สร้างข้อผิดพลาดในขณะ ที่ทำงานผ่านความท้าทาย “ข้อผิดพลาดในการเรียนรู้สามารถสร้างโอกาส [และ] สามารถช่วยให้ตระหนักถึงความเชื่อมโยง”1 การสร้าง กระบวนการแก้ปัญหาที่คุ้นเคยกับนักเรียนจะช่วยให้พวกเขารู้วิธีระบุปัญหาและก้าวไปข้างหน้าเมื่อเกิดข้อผิดพลาดซึ่งจะช่วยลดการหยุดชะงักและความหงุดหงิด ลองใช้วงจรการแก้ปัญหาต่อไปนี้กับนักเรียนเพื่อช่วยแก้ปัญหาโครงการและคิดหาวิธีแก้ปัญหาของตนเอง
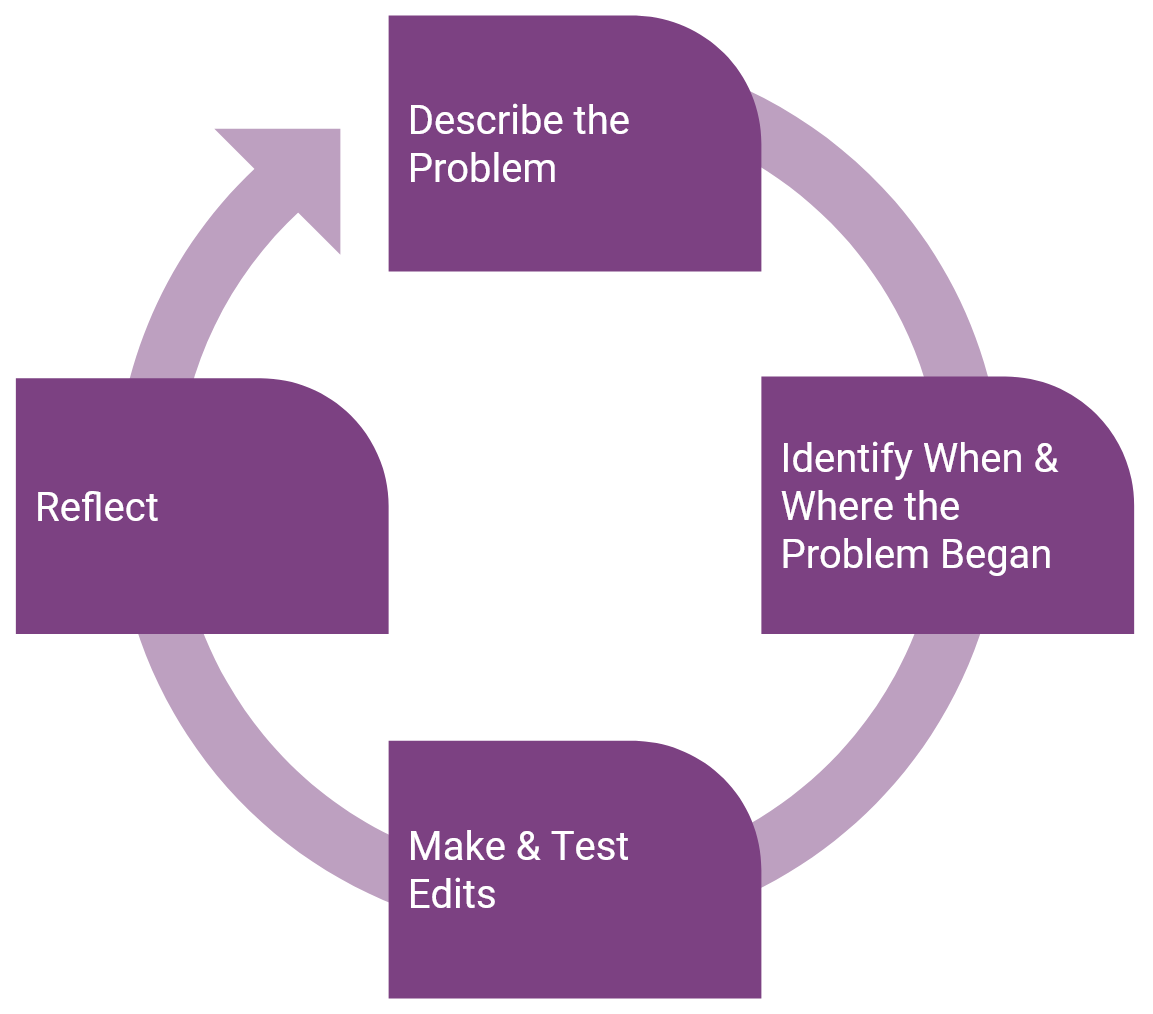
- อธิบายปัญหา
-
ขอให้นักเรียนอธิบายว่ามีอะไรผิดปกติ นักเรียนควรสามารถเชื่อมโยงข้อผิดพลาดกลับไปยังเป้าหมายที่ใช้ร่วมกันหรือความท้าทายที่อยู่ในมือ
- หุ่นยนต์ 123 ตัวเคลื่อนไหวในโครงการของพวกเขาอย่างไร? หุ่น ยนต์ ควรเคลื่อนที่ อย่างไร?
-
ขอให้นักเรียนอธิบายว่ามีอะไรผิดปกติ นักเรียนควรสามารถเชื่อมโยงข้อผิดพลาดกลับไปยังเป้าหมายที่ใช้ร่วมกันหรือความท้าทายที่อยู่ในมือ
- ระบุเวลาและสถานที่ที่ปัญหาเริ่มต้น
- ถามนักเรียนเมื่อพวกเขาสังเกตเห็นปัญหาครั้งแรก
- ส่วนใดของโครงการที่กำลังดำเนินการอยู่?
- หากนักเรียนมีปัญหาในการระบุว่าข้อผิดพลาดอยู่ที่ใดในโครงการกระตุ้นให้พวกเขาใช้คุณลักษณะ Project Stepping ใน VEXcode 123 ตัวชี้นำ ภาพที่ให้มาพร้อม กับฟีเจอร์ Project Stepping สามารถใช้เพื่อช่วยนักเรียนแก้ปัญหาโปรเจกต์ของพวกเขาโดยมีความสามารถในการดูบล็อกที่กำลังดำเนินการทีละรายการ สิ่งนี้จะ ทำให้ พวกเขาเห็นภาพที่ดีขึ้นว่าบล็อกใดที่อาจทำให้เกิดข้อผิดพลาดดังนั้นการดีบักอาจกลายเป็นกระบวนการที่ตรงเป้าหมายและมีประสิทธิภาพมากขึ้น สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีใช้คุณลักษณะ Project Stepping โปรดดูบทความ Stepping Through a Project ใน VEXcode 123 vex Library
- ถามนักเรียนเมื่อพวกเขาสังเกตเห็นปัญหาครั้งแรก
- ทำ & การแก้ไขการทดสอบ
- เมื่อนักเรียนพบข้อผิดพลาดพวกเขาควร แก้ไขโปรเจกต์ของพวกเขา นักเรียนสามารถทดสอบโครงการด้วยการแก้ไขแต่ละครั้ง หากโครงการประสบความสำเร็จพวกเขาสามารถก้าวไปสู่ขั้นตอนต่อไปในวงจรการแก้ปัญหา หากโครงการไม่ประสบความสำเร็จพวกเขาสามารถกลับไปที่จุดเริ่มต้นของกระบวนการและลองอีกครั้ง
- สะท้อน
- ขอให้นักเรียนนึกถึงข้อผิดพลาดที่เกิดขึ้นและเอาชนะในระหว่างกระบวนการ
- ข้อผิดพลาดคืออะไร? ท่านเรียนรู้ อะไรจากความผิดพลาดนี้? มันจะช่วยคุณได้อย่างไรเมื่อเข้ารหัสหุ่นยนต์ 123 ในครั้งต่อไป?
- กระตุ้นให้นักเรียนตระหนักถึงความผิดพลาดและสิ่งที่ได้เรียนรู้จากกระบวนการเพื่อช่วยส่งเสริมแนวคิดเชิงก้าวหน้า การให้ความสำคัญอย่างยิ่งกับแนวคิดเชิงก้าวหน้าสามารถช่วยให้นักเรียนเรียนรู้ว่าจะคงอยู่เมื่อใดและอย่างไรและเมื่อใดที่จะขอความช่วยเหลือ2 หากนักเรียนสามารถมองเห็นกระบวนการของพวกเขาเป็นตัวนำในการเรียนรู้ใหม่พวกเขาสามารถใช้ขั้นตอนที่นี่เพื่อเรียนรู้เพิ่มเติมของพวกเขาเองเช่นเดียวกับการเรียนรู้ของเพื่อนร่วมชั้นของพวกเขาต่อไป เมื่อนักเรียนพบปัญหาเหล่านี้และใคร่ครวญถึงข้อผิดพลาดกระตุ้นให้พวกเขาแบ่งปันข้อผิดพลาดและดำเนินการกับเพื่อนนักเรียน ด้วยวิธีนี้นักเรียนจะกลายเป็น “แหล่งเรียนรู้สำหรับกันและกัน”3
- ขอให้นักเรียนนึกถึงข้อผิดพลาดที่เกิดขึ้นและเอาชนะในระหว่างกระบวนการ
Clear the Landing Area (Lab 2) ได้รับการออกแบบมาเพื่อเป็นการสำรวจแบบปลายเปิดที่จะขอให้นักเรียนของคุณอดทนเพื่อแก้ปัญหาความท้าทาย ในห้องปฏิบัติการนี้เราแนะนำลูปที่มีบล็อค [Forever] และขอให้นักเรียนทดลองใช้ลูปในโครงการเพื่อให้หุ่นยนต์ 123 ขับรถไปและตรวจจับสิ่งกีดขวางทั้งหมดบนพื้นที่ลงจอด (vex 123 Field) หากการใช้ลูปในโปรเจกต์เป็นเรื่องใหม่สำหรับนักเรียนของท่านอาจต้องใช้การวนซ้ำหลายครั้งของโปรเจกต์เพื่อใช้ลูปอย่างมีประสิทธิภาพ ใช้คำแนะนำที่ระบุไว้ในส่วนนี้เพื่อเตรียม ความพร้อมให้นักเรียนสำหรับกระบวนการทดลองและข้อผิดพลาดและเพื่อช่วยให้พวกเขาแก้ไขปัญหาโครงการของพวก เขาเพื่อให้บรรลุเป้าหมายของความท้าทายส่วน การ อำนวยความสะดวกของการเล่นส่วนที่ 1 และ 2 มีการสนับสนุนการสอน เพิ่มเติม สำหรับการแนะนำนักเรียนผ่านความท้าทายในห้องปฏิบัติการ 2 การ มีแผนสำหรับวิธีที่ท่านจะให้การสนับสนุนสำหรับการแก้ปัญหาและการทดลองและข้อผิดพลาดที่จำเป็นในห้องปฏิบัติการนี้สามารถช่วยท่านตอบสนองความต้องการส่วนบุคคลของนักเรียนของท่านได้
ดูบทความ Building Resilience in STEM Labs vex Library สำหรับข้อมูลเพิ่มเติม ว่าข้อเสนอแนะที่มีประสิทธิภาพจะช่วยให้นักเรียนสร้างความยืดหยุ่นและแนวคิดการเติบโตในขณะที่ทำงานผ่าน STEM Labs ได้อย่างไร
1 แฮตตี้จอห์นและเชอร์ลีย์คลาร์ก การเรียนรู้ที่มองเห็นได้: ข้อเสนอแนะ Routledge, Taylor & Francis Group, 2019
2 อ้างแล้ว
3 อ้างแล้ว, หน้า 121