
Contesto
L'unità Mars Rover: Landing Challenge sfiderà i tuoi studenti a costruire progetti VEXcode 123 per risolvere un problema. Questa unità introduce gli studenti all'utilizzo del sensore oculare sulla parte anteriore del robot 123 in una sfida, ispirata al processo utilizzato dagli scienziati durante il tentativo di far atterrare veicoli spaziali, come il rover Perseverance Mars 2020. Gli studenti codificheranno il robot 123 per rilevare un ostacolo, quindi illumineranno un colore per indicare che è stato trovato un ostacolo sul sito di atterraggio.
La missione Mars 2020 della NASA
La missione Mars 2020 della NASA affronta obiettivi scientifici ad alta priorità per l'esplorazione di Marte: vita, clima, geologia e umani. Ma prima che il rover Perseverance possa iniziare la sua missione raccogliendo campioni di roccia e suolo sulla superficie, il rover deve atterrare in sicurezza sul Pianeta Rosso.
Secondo la NASA, solo circa il 40% delle missioni mai inviate su Marte (da qualsiasi agenzia spaziale) hanno avuto successo. L'intero processo di ingresso, discesa e atterraggio richiederà solo pochi minuti, ma il veicolo spaziale che trasporta il rover Perseverance deve rallentare da quasi 20.000 km all'ora (~12.500 miglia all'ora) a zero e trovare un'area aperta e pianeggiante per atterrare. La superficie marziana è piena di ostacoli: enormi crateri da impatto, scogliere, crepe e massi frastagliati. I venti imprevedibili possono anche provocare ulteriori complicazioni.

Per garantire un atterraggio sicuro, il rover Perseverance scatterà immagini durante la discesa e le confronterà con le mappe. Può decidere rapidamente se quell' area è stata dichiarata pericolosa dagli scienziati e apportare modifiche per atterrare in un'area aperta. Guarda il video qui sotto per vedere come dovrebbe atterrare il rover.
In questa unità, gli studenti codificheranno il robot 123 per rilevare gli ostacoli nei siti di atterraggio sui loro 123 campi per garantire un atterraggio sicuro per il rover.
Cos'è un sensore?
Un sensore è, in sostanza, un dispositivo che aiuta un robot a comprendere il mondo che lo circonda. Lo fa raccogliendo e riportando dati sul suo ambiente, che possono quindi essere utilizzati in un progetto per prendere decisioni o eseguire determinati comportamenti. Questa sequenza può essere pensata come un ciclo decisionale Sense → Think → Act.
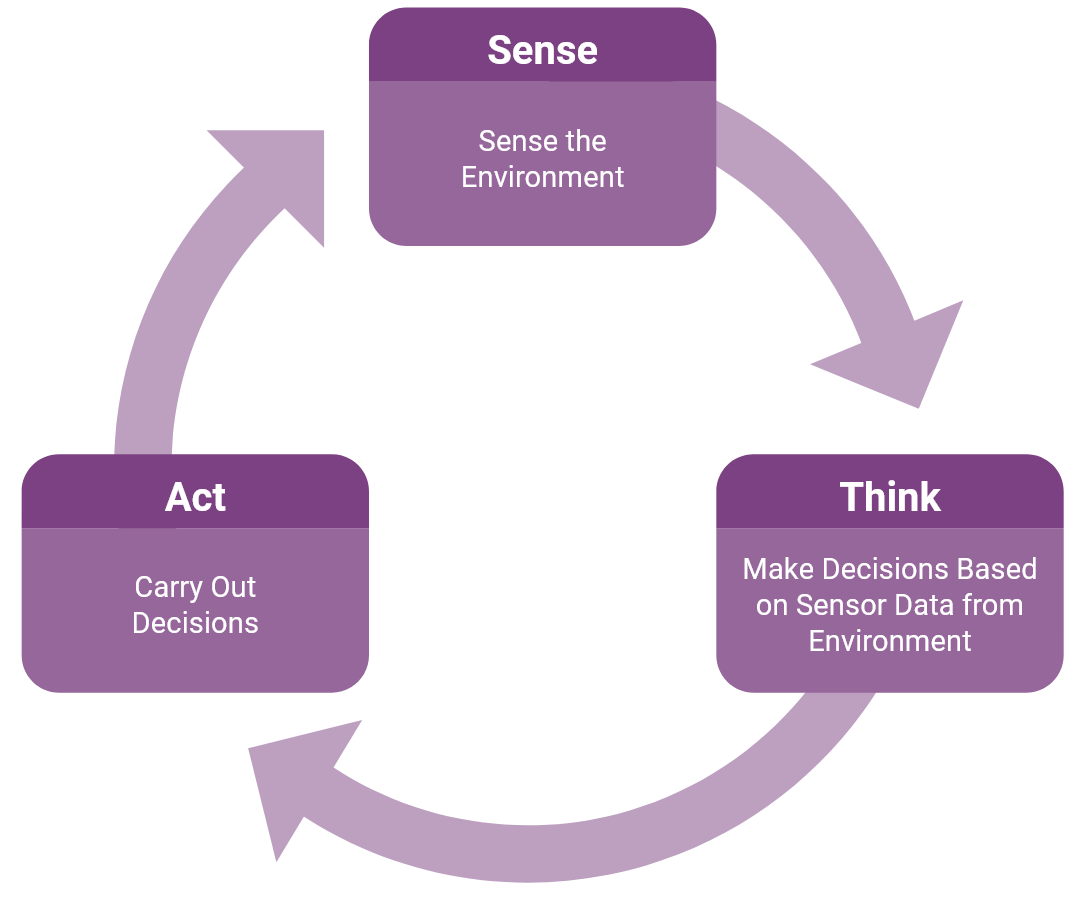 Ciclo decisionale
Ciclo decisionale In questa unità, il robot 123 rileverà oggetti sul campo 123 per aiutare a liberare l'area per un atterraggio sicuro del rover. Il progetto che gli studenti creano esegue questo ciclo in quanto il sensore oculare rileverà la presenza di un oggetto, quindi i comandi VEXcode 123 penseranno e prenderanno decisioni in base al fatto che il sensore oculare rilevi o meno un oggetto e quindi il robot 123 agirà avendo il pulsante sul bagliore del robot.
Cos'è il sensore oculare?
Il sensore oculare sul robot 123 si trova sul lato frontale, sotto la freccia bianca. Il sensore oculare può essere utilizzato per rilevare la presenza o l'assenza di un oggetto, nonché il suo livello di colore o luminosità.

Il sensore oculare utilizza la luce a infrarossi per rilevare gli oggetti. Gli oggetti di colore chiaro riflettono la luce infrarossa e vengono rilevati più facilmente dal sensore oculare. Gli oggetti di colore scuro assorbono la luce infrarossa e l'Eye Sensor non li rileva. Durante l'unità, utilizzare carta bianca o di colore chiaro per gli ostacoli per garantire che il sensore oculare sia in grado di rilevare questi oggetti.
In questa Unità, il Sensore Oculare verrà utilizzato per rilevare quando un oggetto è presente nel percorso del Robot 123. La posizione del sensore oculare sul robot 123 significa che può rilevare solo oggetti direttamente di fronte ad esso. Sii consapevole di questo quando stai posizionando i tuoi 123 robot e ostacoli con i tuoi studenti in modo che i materiali stiano preparando gli studenti al successo.
Per ulteriori informazioni su come codificare il sensore oculare con VEXcode 123, consultare l'articolo Codifica del sensore oculare VEX 123 utilizzando la libreria VEXCODE 123 VEX.
Cos'è VEXcode 123?
VEXcode 123 è un linguaggio di programmazione basato su blocchi utilizzato con il Robot 123. Un linguaggio di programmazione è un insieme di regole in cui i simboli rappresentano azioni. I linguaggi di programmazione seguono le istruzioni passo-passo che un computer esegue per l'esecuzione di un progetto.
Per ulteriori informazioni su come lavorare con VEXcode 123, consultare la sezione VEXcode 123 della libreria VEX.
Di quali blocchi VEXcode 123 hai bisogno?
I blocchi in VEXcode 123 rappresentano 123 comandi del robot che vengono utilizzati per creare un progetto in VEXcode 123. Di seguito è riportato un elenco dei principali blocchi utilizzati durante questa Unità.
| Blocchi VEXcode 123 | Comportamenti |
|---|---|
 |
Il {When started} blocco inizia a eseguire la pila di blocchi collegata quando viene avviato il progetto. |
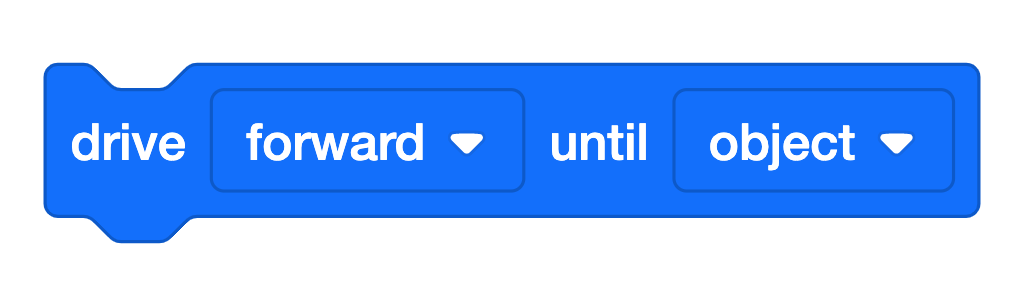 |
Il blocco [Drive until] aziona il robot 123 fino a quando non viene soddisfatta una delle tre condizioni.
|
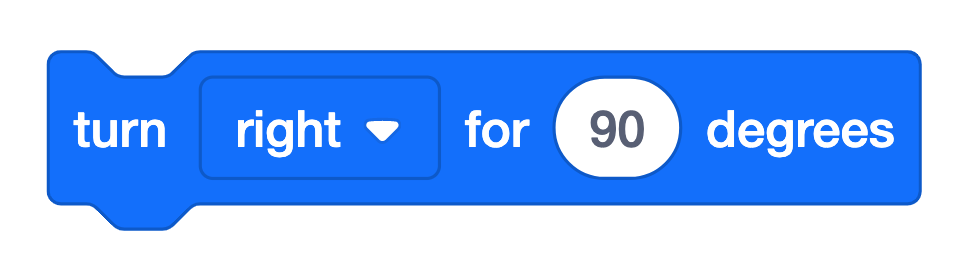 |
Il blocco [Gira per] ruota il robot 123 in posizione a sinistra o a destra per un numero specificato di gradi. |
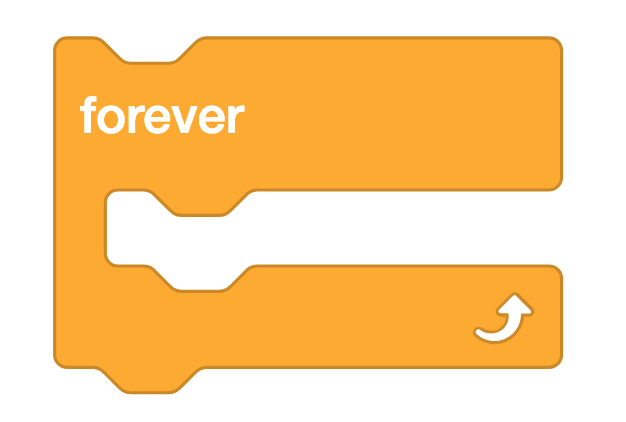 |
Il blocco [Forever] ripete per sempre tutti i blocchi contenuti all'interno della "C". |
![Blocco [Wait]](/stemlabs/sites/default/files/inline-images/%5BWait%5D.png) |
Il blocco [Wait] attende un periodo di tempo specifico prima di passare al blocco successivo in un progetto. |
 |
Il blocco [Bagliore] imposta il colore del bagliore della spia al centro del Robot 123. |
Come funziona il blocco [Drive until]?
[Guidare fino a] blocchi controllano ripetutamente una condizione e controllano il flusso del progetto. Un progetto non passerà al blocco successivo nella pila fino a quando non viene soddisfatta la condizione del blocco [Drive until]. Nel progetto mostrato di seguito, il Robot 123 guiderà in avanti e controllerà continuamente se il Sensore Oculare ha rilevato un oggetto. Una volta rilevato un oggetto dal sensore oculare, il robot 123 smetterà di guidare e passerà al blocco successivo, un blocco [Bagliore].
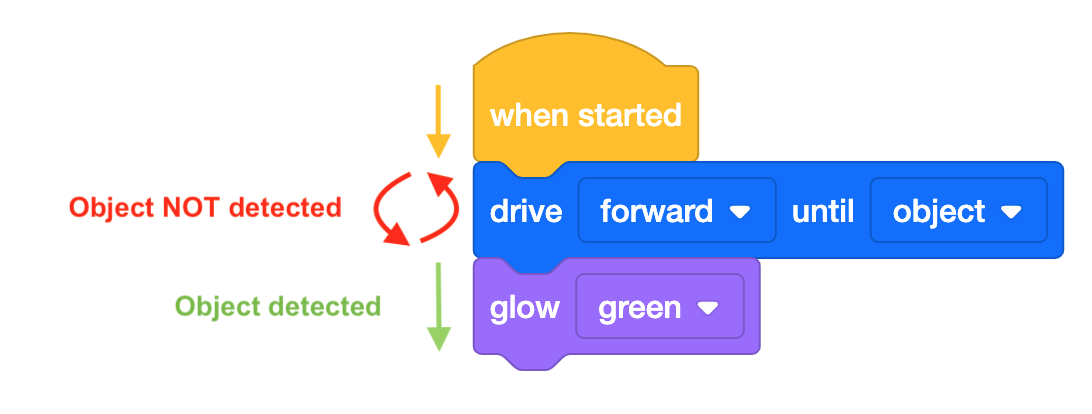
È possibile impostare la condizione che arresterà la guida del Robot 123. Questa unità utilizza il parametro "oggetto" in modo che il robot smetta di guidare quando il sensore oculare sulla parte anteriore del robot 123 rileva un oggetto.
![Blocco [Drive until] con il menu a discesa dei parametri mostrato. Le scelte sono oggetto, crash e linea. La scelta dell'oggetto viene evidenziata con un segno di spunta nero.](/stemlabs/sites/default/files/inline-images/Drive%20until%20with%20parameters.png)
Prepararsi per una sfida a tempo indeterminato in questa unità
In questa unità, agli studenti verrà chiesto di utilizzare ciò che hanno imparato in precedenza per creare un progetto per risolvere una sfida. Poiché è importante sfidare regolarmente gli studenti a risolvere i problemi e applicare le competenze che hanno appreso in un modo nuovo, ti incoraggiamo a sfidare i tuoi studenti e utilizzare queste strategie per costruire la resilienza e aiutarli a guidarli attraverso la sfida. Ecco alcuni suggerimenti per aiutare gli studenti a sperimentare i loro progetti:
Dare feedback senza dare la soluzione - Fare errori mentre si lavora attraverso una sfida è previsto e incoraggiato. "Gli errori nell'apprendimento possono creare opportunità, [e] possono aiutare a realizzare connessioni."1 Creare un processo di risoluzione dei problemi familiare con i tuoi studenti può aiutarli a sapere come identificare un problema e andare avanti quando commettono un errore, riducendo così al minimo le interruzioni e la frustrazione. Prova a utilizzare il seguente ciclo di risoluzione dei problemi con i tuoi studenti per aiutarli a risolvere i loro progetti e trovare le loro soluzioni.
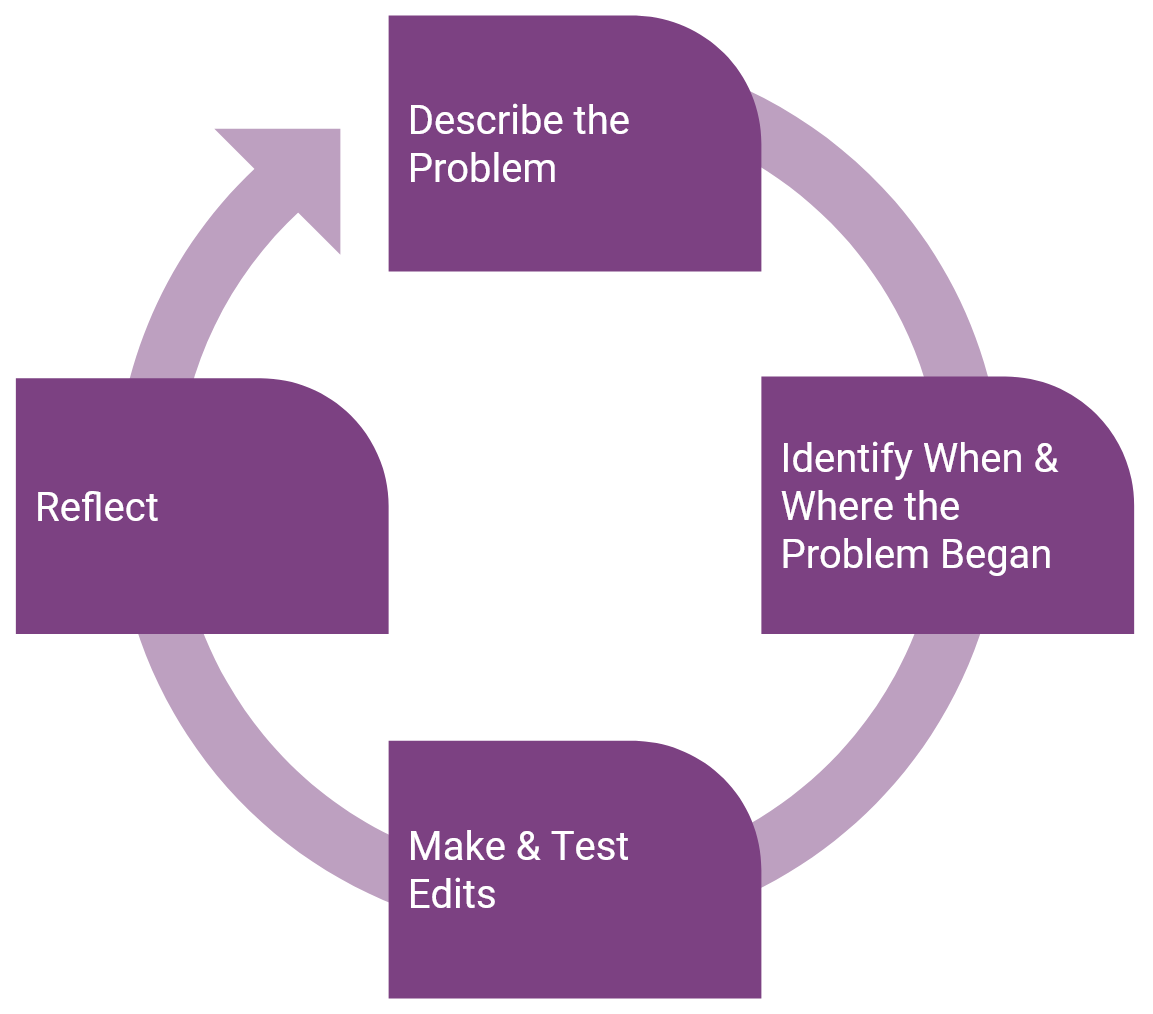 Ciclo di risoluzione dei problemi
Ciclo di risoluzione dei problemi - Descrivi il problema
- Chiedi allo studente di spiegare cosa c'è che non va. Gli studenti dovrebbero essere in grado
di ricollegare l'errore all'obiettivo condiviso o alla sfida in questione.
- Come si sta muovendo il Robot 123 nel loro progetto? Come dovrebbe muoversi il robot?
- Chiedi allo studente di spiegare cosa c'è che non va. Gli studenti dovrebbero essere in grado
di ricollegare l'errore all'obiettivo condiviso o alla sfida in questione.
- Identificare quando e dove è iniziato il problema
- Chiedi allo studente quando ha notato per la prima volta il problema.
- Quale parte del progetto veniva eseguita?
- Se gli studenti hanno difficoltà a determinare dove si trova l'errore nel progetto, incoraggiali a utilizzare la funzione Project Stepping in VEXcode 123. I segnali visivi forniti con la funzione Project Stepping possono essere utilizzati per aiutare gli studenti a risolvere i problemi del loro progetto avendo la possibilità di vedere i blocchi eseguiti uno alla volta. Ciò fornirà loro una visione migliore di quali blocchi potrebbero causare l'errore, quindi il debug può diventare un processo più mirato ed efficiente. Per ulteriori informazioni su come utilizzare la funzione Project Stepping, consultare l'articolo Stepping Through a Project in VEXcode 123 VEX Library.
- Chiedi allo studente quando ha notato per la prima volta il problema.
- Apporta modifiche al & test
- Quando gli studenti trovano un errore, dovrebbero apportare modifiche al loro progetto. Gli studenti possono testare il progetto con ogni modifica apportata. Se il progetto ha successo, possono passare alla fase successiva del ciclo di risoluzione dei problemi. Se il progetto non ha successo, possono tornare all'inizio del processo e riprovare.
- Rifletti
- Chiedi agli studenti di pensare all'errore che hanno commesso e superato durante il processo.
- Qual è stato l'errore? Cosa hai imparato da questo errore? Come può aiutarti a programmare il robot 123 la prossima volta?
- Incoraggia gli studenti a riconoscere i propri errori e ciò che hanno imparato dal processo per incoraggiare una mentalità di crescita. Una forte enfasi su una mentalità di crescita può aiutare gli studenti a imparare quando e come persistere e anche quando chiedere aiuto.2 Se gli studenti possono vedere il loro processo come un precursore di un nuovo apprendimento, allora possono utilizzare i passaggi qui per promuovere il proprio apprendimento e favorire l'apprendimento dei loro compagni di classe. Man mano che gli studenti si imbattono in questi problemi e riflettono sui loro errori, incoraggiali a condividere i loro errori e il loro processo con gli altri studenti. In questo modo, gli studenti possono diventare "risorse di apprendimento l'uno per l'altro".3
- Chiedi agli studenti di pensare all'errore che hanno commesso e superato durante il processo.
Clear the Landing Area (Lab 2) è progettato per essere un'esplorazione a tempo indeterminato che chiederà ai tuoi studenti di perseverare per risolvere una sfida. In questo laboratorio, introduciamo i loop con il blocco [Forever] e chiediamo agli studenti di sperimentare l'utilizzo dei loop nel loro progetto per far guidare il robot 123 e rilevare tutti gli ostacoli sull'area di atterraggio (campo VEX 123). Se l'uso dei loop in un progetto è una novità per i tuoi studenti, potrebbero essere necessarie diverse iterazioni dei loro progetti per utilizzare i loop in modo efficace. Utilizza i suggerimenti delineati in questa sezione per preparare gli studenti al processo di prova ed errore e per aiutarli a risolvere i loro progetti per raggiungere l'obiettivo della sfida. La sezione Facilitazione di Play Part 1 e 2 contiene ulteriori supporti didattici per guidare gli studenti attraverso la sfida Lab 2. Avere un piano su come fornire supporto per la risoluzione dei problemi e le prove e gli errori richiesti in questo laboratorio può aiutarti a soddisfare le esigenze individuali dei tuoi studenti.
Consulta l'articolo Building Resilience in STEM Labs VEX Library per ulteriori informazioni su come un feedback efficace può aiutare gli studenti a costruire resilienza e una mentalità di crescita mentre lavorano attraverso STEM Labs.
1 Hattie, John e Shirley Clarke. Apprendimento visibile: feedback. Routledge, Taylor & Francis Group, 2019.
2 Ibidem.
3 Ibidem, p. 121