
Fundamentos DA invenção
A Mars Rover: Landing Challenge Unit desafiará seus alunos a construir projetos VEXcode 123 para resolver um problema. Esta unidade apresenta aos alunos o uso do sensor ocular na frente do robô 123 em um desafio, inspirado no processo que os cientistas usam ao tentar pousar uma espaçonave, como o rover Mars 2020 Perseverance. Os alunos codificarão o robô 123 para detectar um obstáculo e, em seguida, brilharão uma cor para indicar que um obstáculo foi encontrado no local de pouso.
Missão Mars 2020 da NASA
A missão Mars 2020 da NASA aborda objetivos científicos de alta prioridade para a exploração de Marte: vida, clima, geologia e seres humanos. Mas antes que o rover Perseverance possa começar sua missão de coletar amostras de rochas e solo na superfície, o rover precisa pousar com segurança no Planeta Vermelho.
De acordo com a NASA, apenas cerca de 40% das missões já enviadas a Marte (por qualquer agência espacial) foram bem-sucedidas. Todo o processo de Entrada, Descida e Pouso levará apenas alguns minutos, mas a espaçonave que transporta o rover Perseverance precisa desacelerar de quase 20.000 km/h (~12.500 milhas por hora) para zero e encontrar uma área aberta e plana para pousar. A superfície marciana está cheia de obstáculos — crateras de impacto maciças, penhascos, rachaduras e pedregulhos irregulares. Ventos imprevisíveis também podem provocar mais complicações.

Para ajudar a garantir um pouso seguro, o Rover Perseverance fará imagens durante a descida e comparará essas imagens com os mapas. Ele pode rapidamente decidir se essa área foi determinada como perigosa pelos cientistas e fazer ajustes na terra em uma área aberta. Assista ao vídeo abaixo para ver como o rover deve pousar.
Nesta Unidade, os alunos codificarão o Robô 123 para detectar obstáculos nos locais de pouso em seus Campos 123 para ajudar a garantir um pouso seguro para o rover.
O que é um sensor?
Um sensor é, em essência, um dispositivo que ajuda um robô a entender o mundo ao seu redor. Ele faz isso coletando e relatando dados sobre seu ambiente, que podem ser usados em um projeto para fazer com que o robô tome decisões ou execute determinados comportamentos. Esta sequência pode ser pensada como um loop de decisão do Sense → Think → Act.
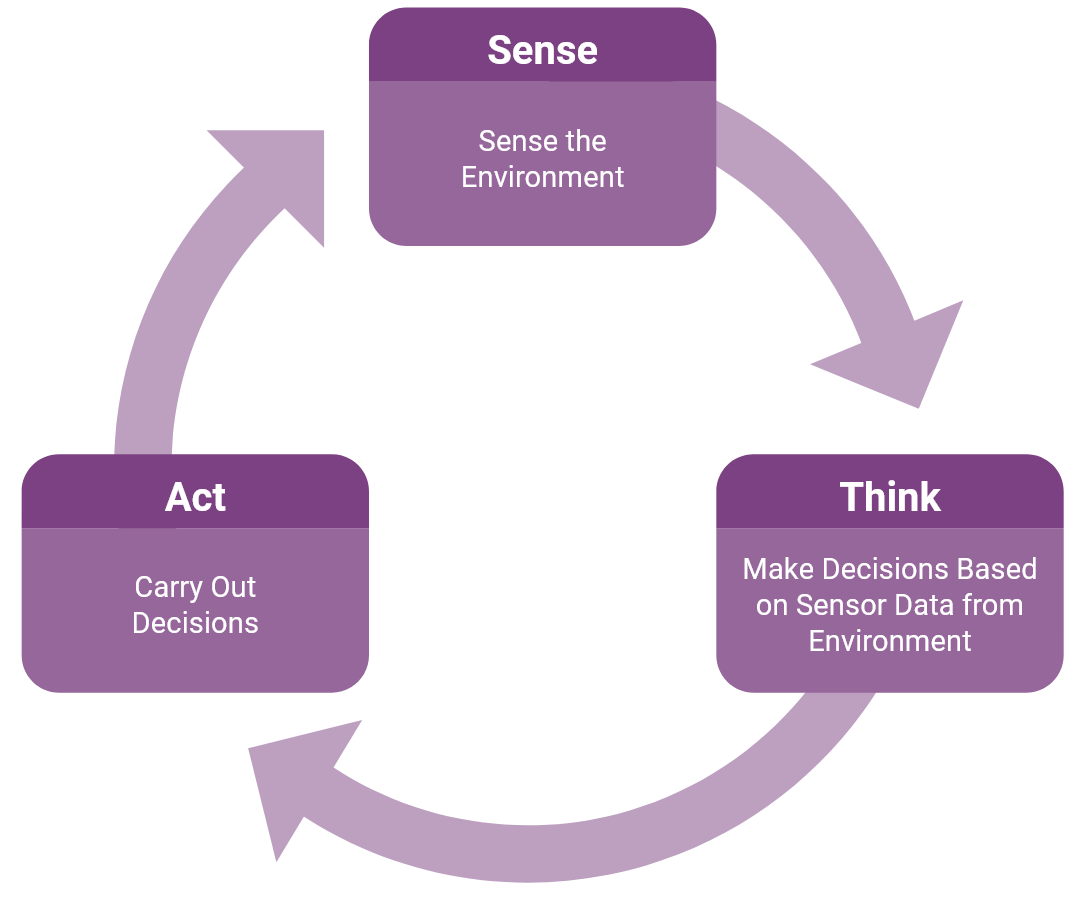
Nesta Unidade, o Robô 123 detectará objetos no Campo 123 para ajudar a limpar a área para um pouso seguro do rover. Os alunos do projeto criam esse loop, pois o Sensor de Olho sentirá a presença de um objeto, depois os comandos do VEXcode 123 pensarão e tomarão decisões com base em se o Sensor de Olho detecta um objeto ou não e, em seguida, o Robô 123 agirá com o botão no brilho do robô.
O que é o sensor ocular?
O sensor ocular no robô 123 está localizado no lado frontal, abaixo da seta branca. O sensor ocular pode ser usado para detectar a presença ou ausência de um objeto, bem como sua cor ou nível de brilho.

O sensor ocular usa luz infravermelha para detectar objetos. Objetos de cor clara refletem a luz infravermelha e são detectados mais facilmente pelo sensor ocular. Objetos de cor escura absorvem a luz infravermelha e o sensor ocular também não os detecta. Durante a unidade, use papel branco ou de cor clara para os obstáculos para garantir que o sensor ocular seja capaz de detectar esses objetos.
Nesta Unidade, o Sensor Ocular será usado para detectar quando um objeto estiver presente no caminho do Robô 123. A posição do sensor ocular no robô 123 significa que ele só pode detectar objetos diretamente à sua frente. Esteja atento a isso ao colocar seus 123 robôs e obstáculos com seus alunos para que os materiais preparem os alunos para o sucesso.
Para obter mais informações sobre como codificar o sensor ocular com o VEXcode 123, consulte o artigo Codificando o sensor ocular VEX 123 usando o VEXcode 123 VEX Library.
O que é o VEXcode 123?
O VEXcode 123 é uma linguagem de programação baseada em blocos usada com o 123 Robot. Uma linguagem de programação é um conjunto de regras em que os símbolos representam ações. As linguagens de programação seguem as instruções passo a passo que um computador executa para que um projeto seja executado.
Para obter mais informações sobre como trabalhar com o VEXcode 123, consulte a Seção VEXcode 123 da Biblioteca VEX.
Quais blocos do VEXcode 123 você precisa?
Os blocos no VEXcode 123 representam 123 comandos de robô que são usados para criar um projeto no VEXcode 123. Abaixo está uma lista dos principais blocos utilizados durante esta Unidade.
| Blocos VEXcode 123 | Comportamentos |
|---|---|
 |
O {When started} bloco começa a executar a pilha de blocos anexada quando o projeto é iniciado. |
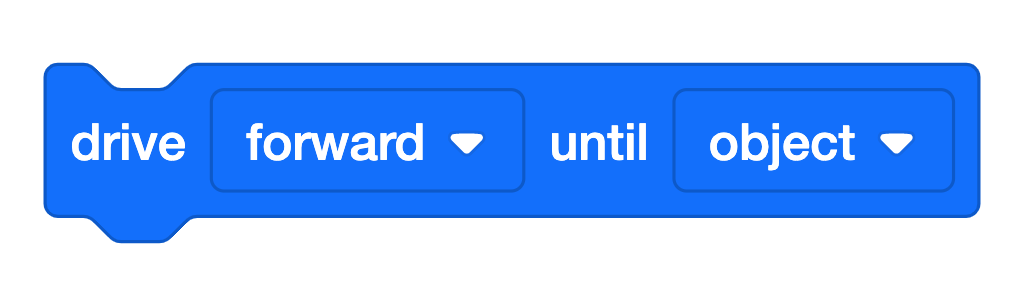 |
O bloco [Drive until] aciona o robô 123 até que uma das três condições seja atendida.
|
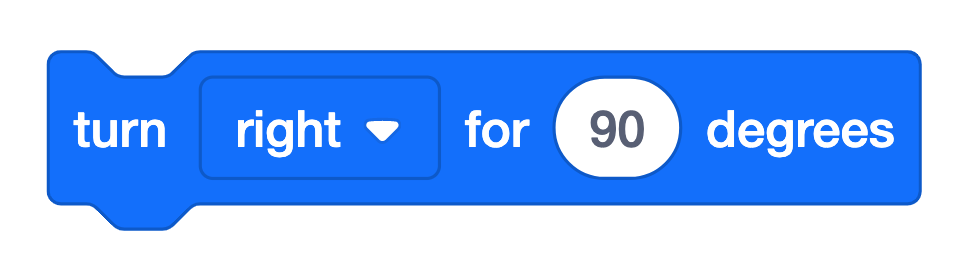 |
O bloco [Turn for] gira o robô 123 no lugar para a esquerda ou para a direita por um número especificado de graus. |
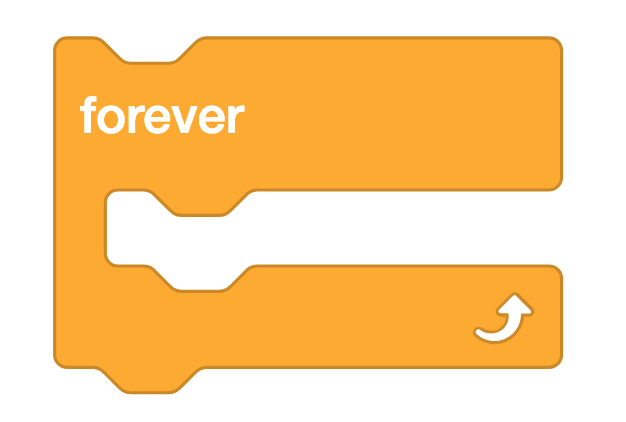 |
O bloco [Forever] repete quaisquer blocos contidos dentro do ‘C’ para sempre. |
![Bloqueio [Aguarde]](/stemlabs/sites/default/files/inline-images/%5BWait%5D.png) |
O bloco [Wait] aguarda um período de tempo específico antes de passar para o próximo bloco de um projeto. |
 |
O bloco [Glow] define a cor de brilho da luz indicadora no centro do 123 Robot. |
Como funciona o bloco [Drive until]?
Os blocos [Drive until] verificam repetidamente uma condição e controlam o fluxo do projeto. Um projeto não se moverá para o próximo bloco na pilha até que a condição do bloco [Drive] seja atendida. No projeto mostrado abaixo, o robô 123 avançará e verificará continuamente se o sensor ocular detectou um objeto. Assim que um objeto for detectado pelo sensor ocular, o robô 123 parará de dirigir e passará para o próximo bloco, um bloco [Glow].
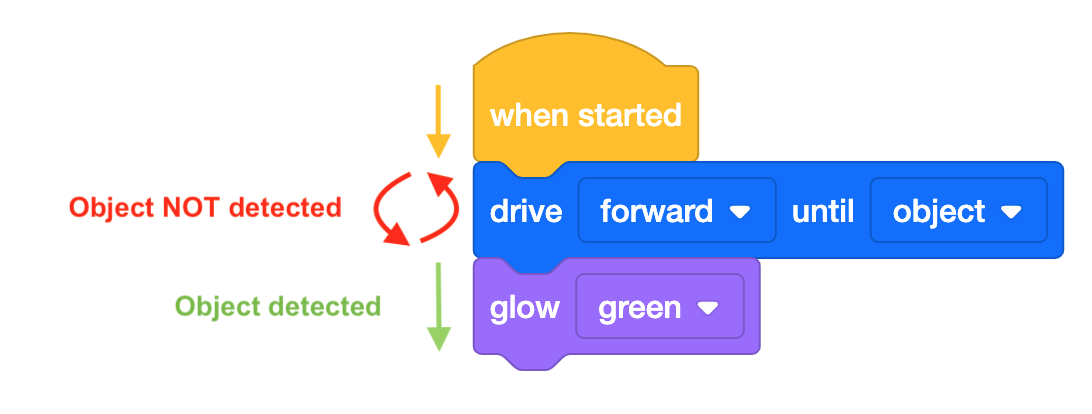 Fluxo
Fluxo A condição que irá parar a condução do robô 123 pode ser definida. Esta unidade usa o parâmetro "object" para que o robô pare de dirigir quando o sensor ocular na frente do robô 123 detectar um objeto.
![Bloco [Drive until] com a lista suspensa de parâmetros mostrada. As opções são object, crash e line. A escolha do objeto é destacada com uma marca de verificação preta.](/stemlabs/sites/default/files/inline-images/Drive%20until%20with%20parameters.png)
Preparação para o Desafio Aberto nesta Unidade
Nesta Unidade, os alunos serão solicitados a usar o que aprenderam anteriormente para criar um projeto para resolver um desafio. Como é importante desafiar regularmente os alunos a resolver problemas e aplicar as habilidades que eles têm aprendido de uma nova maneira, incentivamos você a desafiar seus alunos e usar essas estratégias para construir resiliência e ajudar a guiá-los através do desafio. Aqui estão algumas sugestões para ajudar os alunos a experimentar os seus projetos:
Dar feedback sem dar a solução - Cometer erros ao trabalhar com um desafio é esperado e incentivado. “Erros na aprendizagem podem criar oportunidades, [e] podem ajudar a realizar conexões.”1 Criar um processo familiar de resolução de problemas com seus alunos pode ajudá-los a saber como identificar um problema e seguir em frente quando cometem um erro, minimizando assim a interrupção e a frustração. Tente usar o seguinte ciclo de resolução de problemas com os seus alunos para ajudá-los a resolver os seus projetos e encontrar as suas próprias soluções.
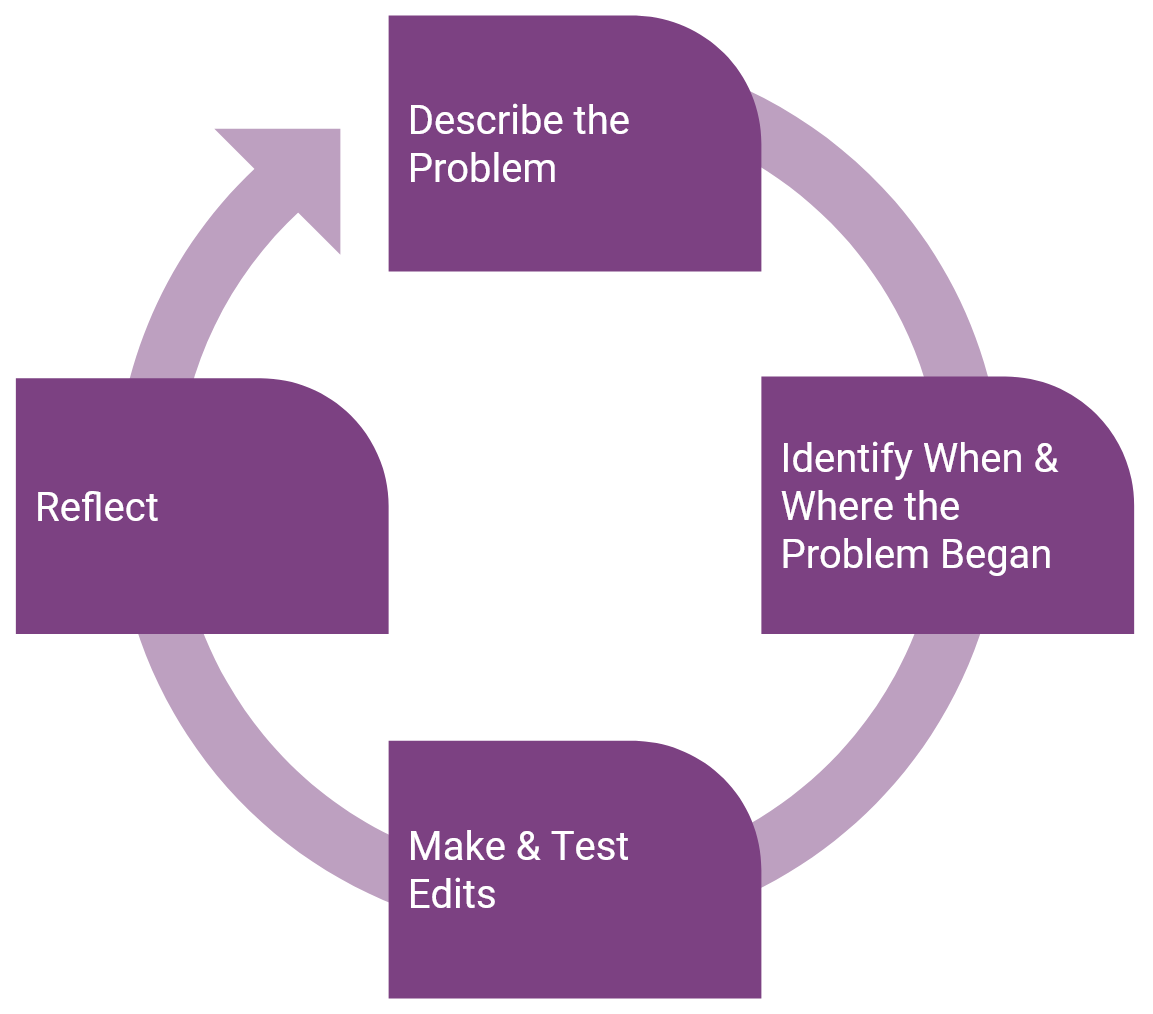
- Descreva o problema
- Peça ao aluno para explicar o que está errado. Os alunos devem ser capazes de relacionar o
erro ao objetivo compartilhado ou ao desafio em questão.
- Como é que o 123 Robot está a mover-se no seu projeto? Como o robô deve se mover?
- Peça ao aluno para explicar o que está errado. Os alunos devem ser capazes de relacionar o
erro ao objetivo compartilhado ou ao desafio em questão.
- Identificar quando e onde o problema começou
- Pergunte ao aluno quando ele percebeu o problema pela primeira vez.
- Que parte do projeto estava a ser executada?
- Se os alunos estiverem tendo dificuldade em determinar onde está o erro no projeto, incentive-os a usar o recurso Passo a Passo do Projeto no VEXcode 123. As dicas visuais fornecidas com o recurso Passo a Passo do Projeto podem ser usadas para ajudar os alunos a solucionar problemas de seu projeto, tendo a capacidade de ver os blocos sendo executados um de cada vez. Isso lhes dará uma visão melhor de quais blocos podem estar causando o erro, de modo que a depuração pode se tornar um processo mais direcionado e eficiente. Para obter mais informações sobre como usar o recurso Project Stepping, consulte o artigo Stepping Through a Project in VEXcode 123 VEX Library.
- Pergunte ao aluno quando ele percebeu o problema pela primeira vez.
- Fazer edições & de teste
- À medida que os alunos encontram um erro, eles devem fazer edições no projeto. Os alunos podem testar o projeto com cada edição feita. Se o projeto for bem-sucedido, eles podem passar para a próxima etapa do ciclo de resolução de problemas. Se o projeto não for bem-sucedido, eles podem voltar ao início do processo e tentar novamente.
- Refletir
- Peça aos alunos que pensem sobre o erro que cometeram e superaram durante o processo.
- Qual foi o erro? O que aprendeu com este erro? Como isso pode ajudá-lo a codificar o robô 123 da próxima vez?
- Incentive os alunos a reconhecer seus erros e o que aprenderam com o processo para ajudar a incentivar uma mentalidade de crescimento. Uma forte ênfase em uma mentalidade de crescimento pode ajudar os alunos a aprender quando e como persistir e também quando pedir ajuda.2 Se os alunos puderem ver seu processo como um precursor de um novo aprendizado, eles poderão usar as etapas aqui para promover seu próprio aprendizado, bem como promover o aprendizado de seus colegas de classe. À medida que os alunos se deparam com essas questões e refletem sobre seus erros, incentive-os a compartilhar seus erros e processos com outros alunos. Dessa forma, os alunos podem se tornar “recursos de aprendizagem uns para os outros”3.
- Peça aos alunos que pensem sobre o erro que cometeram e superaram durante o processo.
Limpe a Área de Pouso (Laboratório 2) foi projetada para ser uma exploração aberta que pedirá aos seus alunos que perseverem para resolver um desafio. Neste Laboratório, introduzimos loops com o bloco [Forever] e pedimos aos alunos que experimentem o uso de loops em seu projeto para que o robô 123 dirija e detecte todos os obstáculos na área de pouso (campo VEX 123). Se a utilização de loops num projeto for nova para os seus alunos, podem ser necessárias várias iterações dos seus projetos para utilizar os loops de forma eficaz. Use as sugestões descritas nesta seção para preparar os alunos para o processo de tentativa e erro e para ajudá-los a solucionar seus projetos para atingir a meta do desafio. A seção de Facilitação do Jogo Parte 1 e 2 contém suportes instrucionais adicionais para orientar os alunos no desafio do Laboratório 2. Ter um plano de como você fornecerá suporte para a solução de problemas e tentativas e erros necessários neste Laboratório pode ajudá-lo a atender às necessidades individuais de seus alunos.
Consulte o artigo Building Resilience in STEM Labs VEX Library para obter mais informações sobre como o feedback eficaz pode ajudar os alunos a desenvolver resiliência e uma mentalidade de crescimento enquanto trabalham nos STEM Labs.
1 Hattie, John e Shirley Clarke. Aprendizagem Visível: Feedback. Routledge, Grupo Taylor & Francis, 2019.
2 Ibid.
3 Ibid, p. 121