Desafíos de remezcla: basados en bloques de control Clawbot
![]() Caja de herramientas para maestros
:
antes de la primera actividad
Caja de herramientas para maestros
:
antes de la primera actividad
-
Coloque a los estudiantes en grupos de 2 o 4 estudiantes. Un estudiante debe ser designado como el conductor: el estudiante que usa el controlador para conducir el Clawbot.
-
Los objetos pueden ser cualquier material/objeto del aula que tenga a mano (goma de borrar, rollo de cinta, caja de pañuelos) y se pueden distribuir a los grupos de estudiantes al comienzo de esta actividad. Cada grupo necesitará solo un objeto para la primera actividad, "¡Agarra un objeto!" y tres objetos para las otras dos actividades.
-
Si el tiempo lo permite en cualquiera de las Actividades de Remix, haga que los estudiantes se turnen como Conductor.
-
El socio de la App debe poder completar los siguientes pasos:
-
Con el botón R2, abra la Garra.
-
Usando los Joysticks, mueve tu Clawbot para que tu objeto se coloque dentro de la Garra abierta.
-
Con el botón R1, cierre la garra.
-
Para soltar el objeto, abra la garra una vez más utilizando el botón R2.
-
¡Coge un objeto!
El objetivo de esta actividad es agarrar y soltar un objeto con el Clawbot usando el Controller.
Estos son algunos pasos para guiar a tu grupo:
- Coloca el objeto de tu grupo en el suelo y asegúrate de que tu Clawbot tenga suficiente espacio para moverse sin interferir con otros grupos.
- Enumera los pasos que necesitará el Clawbot para agarrar el objeto. ¡Asegúrate de incluir qué botones usarás para realizar esta tarea!
- Escriba los pasos que el controlador enumera en el cuaderno de ingeniería.
-
Haga clic en el botón Descargar en la barra de herramientas para descargar el proyecto Clawbot Control en el Robot Brain.
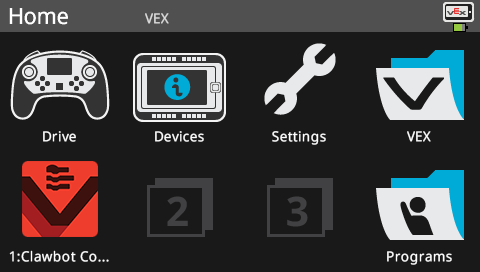
- Compruebe que su proyecto se ha descargado en el Cerebro del Clawbot mirando la pantalla del Cerebro del Robot. El nombre del proyecto, Clawbot Control, debe aparecer en la ranura 1.
- Ejecuta el proyecto en el Clawbot.
- Coge y suelta un objeto con el Clawbot usando el Controller.
¡Felicidades! ¡Has agarrado un objeto con tu Clawbot usando el Controller!
¿Hubo alguna diferencia entre sus predicciones y las acciones que tomó durante la actividad? Si es así, añádelos a tu cuaderno de ingeniería.
![]() Caja de herramientas para maestros
-
Antes de la segunda actividad
Caja de herramientas para maestros
-
Antes de la segunda actividad
-
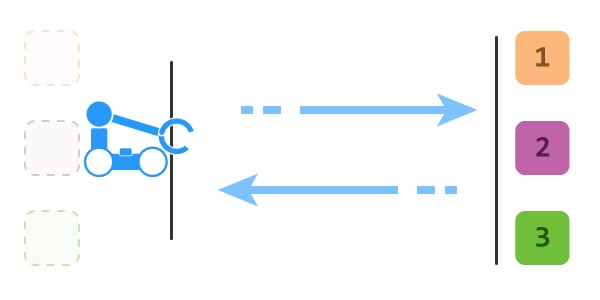
Antes de que comience la segunda actividad (gemas de colores), haga que cada grupo alinee sus Clawbots en un lado de la sala. Marque esta ubicación inicial con un objeto o una línea de cinta en el suelo. En el lado opuesto de la sala, determine un área de recuperación de objetos colocando un objeto en el piso que sea equidistante de las ubicaciones de la base de operaciones de cada grupo. Esto puede ser un objeto del aula o incluso una línea de cinta adhesiva en el suelo. Indique a los grupos que deben colocar los tres objetos en el área de recuperación detrás del punto o línea que ha establecido. De esta manera, cada grupo tiene que mover su Clawbot la misma distancia para realizar la tarea requerida y garantizar la equidad.
-
Para un desafío más complejo, haga que los estudiantes devuelvan los objetos a la base de operaciones y los apilen. El grupo que complete su pila primero gana.
Gemas de colores
El objetivo de esta actividad es utilizar tus habilidades de Clawbot para recoger varios objetos, uno a la vez, y devolverlos a un lugar más rápido que los otros grupos de tu clase. ¡Buena suerte!
Estos son algunos pasos para guiar a tu equipo:
- Mueva los objetos de su grupo detrás del área de recuperación de objetos que su maestro ha establecido y asegúrese de que su Clawbot tenga espacio para moverse sin interferir con otros grupos.
- Enumera los pasos que necesitará el Clawbot para agarrar cada objeto y devolverlo a la base de operaciones. ¡Asegúrate de incluir qué botones usarás para realizar esta tarea!
- Escriba los pasos que el controlador enumera en el cuaderno de ingeniería.
- Usando el reloj del aula o un reloj, mantenga la hora y regístrela en su cuaderno de ingeniería.
- Recupere cada objeto lo más rápido que pueda.
¡Felicidades! ¡Has recogido los tres objetos de tu grupo y los has devuelto a tu base de operaciones con tu Clawbot usando el Controller!
![]() Caja de herramientas para maestros
-
Antes de la tercera actividad
Caja de herramientas para maestros
-
Antes de la tercera actividad
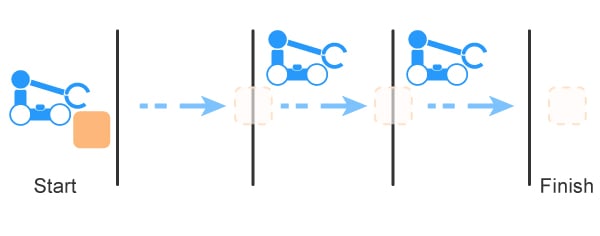
Antes de que comience la tercera actividad (¡Carrera de relevos!), asegúrese de que los estudiantes todavía estén en sus grupos pequeños de 2 o 4 estudiantes. El objetivo es llevar un objeto a lo largo de un recorrido de tres metros. Una persona del grupo recogerá el objeto usando el Clawbot y avanzará para llevarlo por un metro. A continuación, dejarán caer el objeto. La siguiente persona del grupo recogerá el objeto y lo llevará para la segunda etapa, donde también dejará caer el objeto. La tercera persona del grupo terminará la carrera de relevos llevando el objeto para la tercera etapa y dejándolo caer a través de la línea de meta.
Pídale a uno de los miembros del grupo que controle la hora. Esta persona también debe asegurarse de que el Clawbot no obstruya a otros conductores o estudiantes y verifique que el robot coloque el objeto lo suficientemente lejos sobre la línea.
Si el tiempo lo permite, juegue el desafío más de una vez para asegurarse de que todos los miembros del grupo tengan la oportunidad de conducir el robot.
¡Carrera de relevos!
El objetivo de esta actividad es utilizar tus habilidades de Clawbot y trabajo en equipo en una carrera de relevos. El grupo será responsable de mover un objeto a través de un recorrido de tres metros en el menor tiempo posible.
Actor 1: Elige el objeto y llévalo a la línea de un metro. Suelta el objeto.
Jugador 2: Recoge el objeto y llévalo de la línea de uno a la de dos metros. Suelta el objeto.
Actor 3: Recoge el objeto y llévalo desde la línea de dos metros hasta la línea de meta. Deja caer el objeto en el área de la portería.
Actor 4: Monitoree el tiempo y asegúrese de que el Clawbot no obstruya a otros conductores o estudiantes. Asegúrese de que el robot coloque el objeto lo suficientemente lejos sobre la línea.