ความท้าทายในการรีมิกซ์: บล็อคควบคุม Clawbot
![]() กล่องเครื่องมือสำหรับครู
-
ก่อนกิจกรรมแรก
กล่องเครื่องมือสำหรับครู
-
ก่อนกิจกรรมแรก
-
แบ่งนักเรียนเป็นกลุ่มๆ ละ 2 หรือ 4 คน นักเรียนหนึ่งคนควรได้รับการกำหนดให้เป็นผู้ขับรถ - นักเรียนที่ใช้ตัวควบคุมในการขับ Clawbot
-
วัตถุสามารถเป็นวัสดุหรือวัตถุในห้องเรียนใดๆ ก็ได้ที่คุณมีอยู่ในมือ (ยางลบ ม้วนเทป กล่องทิชชู่) และสามารถแจกจ่ายให้กับกลุ่มนักเรียนในช่วงเริ่มต้นของกิจกรรมนี้ แต่ละกลุ่มจะต้องมีวัตถุเพียงหนึ่งชิ้นสำหรับกิจกรรมแรก ซึ่งก็คือ "คว้าวัตถุ!" และวัตถุสามชิ้นสำหรับกิจกรรมอีกสองกิจกรรม
-
หากมีเวลาเหลือในกิจกรรม Remix ใดๆ ให้ให้เด็กๆ ผลัดกันเป็นผู้ขับ
-
ผู้ขับขี่ควรสามารถดำเนินการตามขั้นตอนต่อไปนี้ได้:
-
ใช้ปุ่ม R2 เพื่อเปิดกรงเล็บ
-
ใช้จอยสติ๊กเพื่อขยับ Clawbot ของคุณเพื่อให้วัตถุของคุณอยู่ในตำแหน่งภายใน Claw ที่เปิดอยู่
-
ใช้ปุ่ม R1 เพื่อปิดกรงเล็บ
-
หากต้องการปล่อยวัตถุ ให้เปิดกรงเล็บอีกครั้งโดยใช้ปุ่ม R2
-
คว้าวัตถุ!
เป้าหมายของกิจกรรมนี้คือการคว้าและปล่อยวัตถุด้วย Clawbot โดยใช้ตัวควบคุม
ต่อไปนี้เป็นขั้นตอนบางประการในการแนะนำกลุ่มของคุณ:
- วางวัตถุของกลุ่มของคุณบนพื้นและตรวจสอบให้แน่ใจว่า Clawbot ของคุณมีพื้นที่เพียงพอในการเคลื่อนไหวโดยไม่รบกวนกลุ่มอื่น
- ระบุขั้นตอนที่ Clawbot จะต้องคว้าวัตถุ อย่าลืมระบุปุ่มที่คุณจะใช้เพื่อทำงานนี้ให้ครบถ้วน!
- เขียนขั้นตอนที่คนขับระบุไว้ในสมุดบันทึกวิศวกรรม
-
คลิกปุ่มดาวน์โหลดในแถบเครื่องมือเพื่อดาวน์โหลดโครงการ Clawbot Control ไปยัง Robot Brain
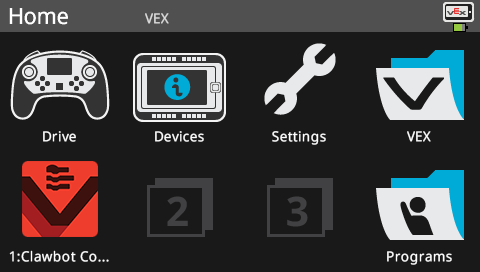
- ตรวจสอบให้แน่ใจว่าโครงการของคุณดาวน์โหลดไปยัง Clawbot's Brain แล้วโดยดูที่หน้าจอของ Robot Brain ชื่อโครงการ Clawbot Control ควรระบุไว้ในช่องที่ 1
- รันโครงการบน Clawbot
- หยิบและปล่อยวัตถุด้วย Clawbot โดยใช้ตัวควบคุม
ยินดีด้วย! คุณได้คว้าวัตถุด้วย Clawbot ของคุณโดยใช้ตัวควบคุม!
มีข้อแตกต่างใดๆ ระหว่างการคาดเดาของคุณกับการกระทำที่คุณทำระหว่างกิจกรรมหรือไม่? หากเป็นเช่นนั้น ให้เพิ่มลงในสมุดบันทึกวิศวกรรมของคุณ
![]() กล่องเครื่องมือสำหรับครู
-
ก่อนกิจกรรมที่สอง
กล่องเครื่องมือสำหรับครู
-
ก่อนกิจกรรมที่สอง
-
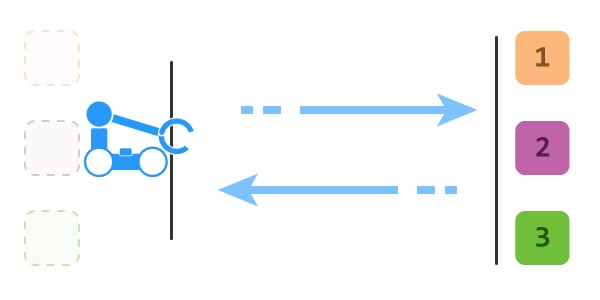
ก่อนที่จะเริ่มกิจกรรมที่สอง (อัญมณีสี) ให้แต่ละกลุ่มเรียง Clawbots ไว้ที่ด้านใดด้านหนึ่งของห้อง ทำเครื่องหมายตำแหน่งเริ่มต้นนี้ด้วยวัตถุหรือเส้นเทปบนพื้น ในด้านตรงข้ามของห้อง กำหนดพื้นที่หยิบวัตถุโดยวางวัตถุไว้บนพื้นที่มีระยะห่างเท่ากันจากที่ตั้งฐานบ้านของแต่ละกลุ่ม สิ่งนี้อาจเป็นวัตถุในห้องเรียนหรือแม้แต่เส้นเทปที่วางไว้บนพื้นก็ได้ สั่งให้กลุ่มต่างๆ วางวัตถุทั้งสามชิ้นไว้ในพื้นที่ดึงข้อมูลด้านหลังจุดหรือเส้นที่คุณกำหนดไว้ ด้วยวิธีนี้ แต่ละกลุ่มจะต้องเคลื่อนย้าย Clawbot ของตนในระยะทางเท่ากันเพื่อให้บรรลุภารกิจที่กำหนดและเพื่อให้เกิดความยุติธรรม
-
สำหรับความท้าทายที่ซับซ้อนมากขึ้น ให้ให้เด็กๆ วางวัตถุกลับคืนที่ฐานบ้านและวางซ้อนกัน กลุ่มที่รวบรวมสแต็กเสร็จก่อนจะเป็นผู้ชนะ
อัญมณีสี
เป้าหมายของกิจกรรมนี้คือการใช้ทักษะ Clawbot ของคุณในการรวบรวมวัตถุหลายๆ ชิ้น ครั้งละชิ้น และส่งคืนไปยังสถานที่ใดสถานที่หนึ่งได้เร็วกว่ากลุ่มอื่นๆ ในชั้นเรียนของคุณ ขอให้โชคดี!
ต่อไปนี้เป็นขั้นตอนบางประการที่จะเป็นแนวทางให้กับทีมของคุณ:
- ย้ายวัตถุของกลุ่มของคุณไปด้านหลังพื้นที่ค้นหาวัตถุที่ครูของคุณกำหนดไว้ และตรวจสอบให้แน่ใจว่า Clawbot ของคุณมีพื้นที่ในการเคลื่อนย้ายโดยไม่รบกวนกลุ่มอื่น
- ระบุขั้นตอนที่ Clawbot จะต้องใช้ในการคว้าวัตถุแต่ละชิ้นและนำกลับไปที่ฐานหลัก อย่าลืมระบุปุ่มที่คุณจะใช้เพื่อทำงานนี้ให้ครบถ้วน!
- เขียนขั้นตอนที่คนขับระบุไว้ในสมุดบันทึกวิศวกรรม
- ใช้นาฬิกาในห้องเรียนหรือนาฬิกาข้อมือเพื่อบันทึกเวลาลงในสมุดบันทึกวิศวกรรมของคุณ
- ดึงแต่ละวัตถุกลับมาให้เร็วที่สุดเท่าที่คุณสามารถทำได้
ยินดีด้วย! คุณได้รวบรวมวัตถุทั้งสามชิ้นของกลุ่มของคุณแล้ว นำพวกมันกลับไปที่ฐานบ้านด้วย Clawbot ของคุณโดยใช้ตัวควบคุม!
![]() กล่องเครื่องมือสำหรับครู
-
ก่อนกิจกรรมที่สาม
กล่องเครื่องมือสำหรับครู
-
ก่อนกิจกรรมที่สาม
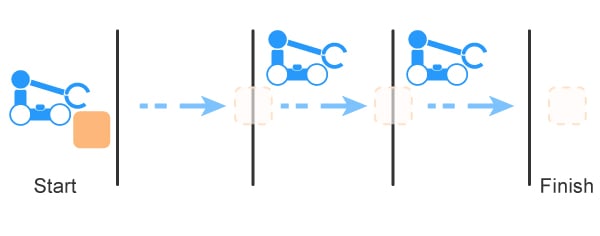
ก่อนที่จะเริ่มกิจกรรมที่สาม (การแข่งขันวิ่งผลัด!) ให้แน่ใจว่านักเรียนยังคงอยู่ในกลุ่มเล็ก ๆ ที่มี 2 หรือ 4 คน วัตถุประสงค์คือการพกพาวัตถุไปในระยะทางสามเมตร หนึ่งคนในกลุ่มจะหยิบวัตถุโดยใช้ Clawbot และขับไปข้างหน้าเพื่อพาไปเป็นระยะทางหนึ่งเมตร จากนั้นพวกเขาจะปล่อยวัตถุนั้น คนถัดไปในกลุ่มจะหยิบวัตถุขึ้นมาและถือไปยังขาที่สองซึ่งพวกเขาจะทิ้งวัตถุนั้นเช่นกัน บุคคลที่สามในกลุ่มจะจบการแข่งขันวิ่งผลัดโดยการถือวัตถุเป็นขาที่สามและปล่อยลงสู่เส้นชัย
ขอให้สมาชิกคนใดคนหนึ่งในกลุ่มคอยจับตาดูเวลา บุคคลนี้ควรตรวจสอบให้แน่ใจว่า Clawbot ไม่กีดขวางผู้ขับขี่หรือนักเรียนคนอื่นๆ และตรวจสอบว่าหุ่นยนต์วางวัตถุไว้ห่างจากเส้นเพียงพอหรือไม่
หากมีเวลา ควรเล่นความท้าทายนี้มากกว่าหนึ่งครั้งเพื่อให้แน่ใจว่าสมาชิกในกลุ่มทุกคนมีโอกาสขับหุ่นยนต์
การแข่งขันวิ่งผลัด!
เป้าหมายของกิจกรรมนี้คือการใช้ทักษะ Clawbot และการทำงานเป็นทีมในการแข่งขันวิ่งผลัด กลุ่มจะรับผิดชอบในการเคลื่อนย้ายวัตถุข้ามเส้นระยะทางสามเมตรในเวลาที่เร็วที่สุดเท่าที่จะเป็นไปได้
ผู้เล่น 1: หยิบวัตถุและถือไปยังเส้นระยะทางหนึ่งเมตร ทิ้งวัตถุ
ผู้เล่น 2: หยิบวัตถุขึ้นมาและถือจากเส้นหนึ่งไปยังเส้นสองเมตร ทิ้งวัตถุ
ผู้เล่น 3: หยิบวัตถุขึ้นมาและแบกจากเส้นสองเมตรไปยังเส้นชัย ปล่อยวัตถุลงในพื้นที่เป้าหมาย
ผู้เล่น 4: ตรวจสอบเวลาและตรวจสอบให้แน่ใจว่า Clawbot จะไม่กีดขวางผู้ขับขี่หรือนักเรียนคนอื่นๆ ตรวจสอบให้แน่ใจว่าหุ่นยนต์วางวัตถุไว้ห่างจากเส้นเพียงพอ