Remix Challenges : Clawbot Control - Python
![]() Boîte à outils de l'enseignant
-
Avant la première activité
Boîte à outils de l'enseignant
-
Avant la première activité
-
Placez les élèves en groupes de 2 ou 4 élèves. Un élève doit être désigné comme conducteur - l'élève qui utilise le contrôleur pour conduire le Clawbot.
-
Les objets peuvent être n'importe quel matériel/objet de classe que vous avez à portée de main (gomme, rouleau de ruban adhésif, boîte à mouchoirs) et peuvent être distribués aux groupes d'élèves au début de cette activité. Chaque groupe n'aura besoin que d'un objet pour la première activité, « Attrapez un objet ! » et de trois objets pour les deux autres activités.
-
Si le temps le permet dans l'une des activités Remix, demandez aux élèves de jouer à tour de rôle le rôle de chauffeur.
-
Le chauffeur doit être en mesure de suivre les étapes suivantes :
-
À l'aide du bouton R2, ouvrez la griffe.
-
À l'aide des joysticks, déplacez votre Clawbot de sorte que votre objet soit positionné à l'intérieur de la griffe ouverte.
-
À l'aide du bouton R1, fermez la griffe.
-
Pour libérer l'objet, ouvrez à nouveau la griffe à l'aide du bouton R2.
-
Attrapez un objet !
Le but de cette activité est de saisir et de libérer un objet avec le Clawbot à l'aide du contrôleur.
Voici quelques étapes pour guider votre groupe :
- Placez l'objet de votre groupe sur le sol et assurez-vous que votre Clawbot dispose de suffisamment d'espace pour se déplacer sans interférer avec les autres groupes.
- Énumérez les étapes dont le Clawbot aura besoin pour saisir l'objet. Assurez-vous d'inclure les boutons que vous utiliserez pour accomplir cette tâche !
- Écrivez les étapes que le pilote énumère dans le cahier d'ingénierie.
-
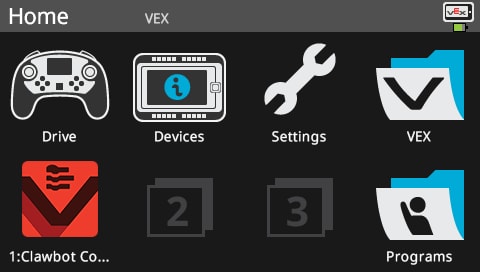
Cliquez sur le bouton Télécharger dans la barre d'outils pour télécharger le projet Clawbot Control dans le cerveau du robot.

-
Vérifiez que votre projet a été téléchargé dans le cerveau du Clawbot en regardant l'écran du cerveau du robot. Le nom du projet, Clawbot Control, doit être répertorié dans l'emplacement 1.
- Exécutez le projet sur le Clawbot.
- Saisissez et relâchez un objet avec le Clawbot à l'aide du contrôleur.
Félicitations ! Vous avez saisi un objet avec votre Clawbot à l'aide du contrôleur !
Y a-t-il eu des différences entre vos prédictions et les actions que vous avez entreprises pendant l'activité ? Si c'est le cas, ajoutez-les à votre cahier d'ingénierie.
![]() Boîte à outils de l'enseignant
-
Avant la deuxième activité
Boîte à outils de l'enseignant
-
Avant la deuxième activité
-
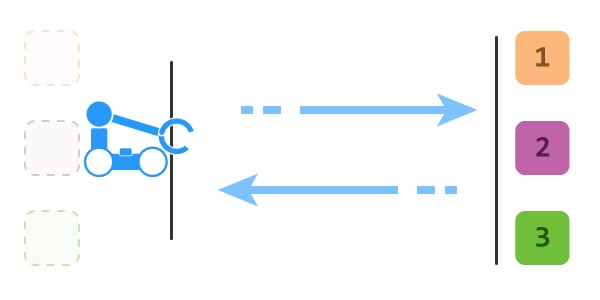
Avant le début de la deuxième activité (gemmes colorées), demandez à chaque groupe d'aligner leurs Clawbots d'un côté de la pièce. Marquez cet emplacement de départ avec un objet ou une ligne de ruban adhésif sur le sol. De l'autre côté de la pièce, déterminez une zone de récupération d'objet en plaçant un objet sur le sol qui est équidistant des emplacements de base de chaque groupe. Il peut s'agir d'un objet de classe ou même d'une ligne de ruban adhésif sur le sol. Dites aux groupes qu'ils doivent placer les trois objets dans la zone de récupération derrière le point ou la ligne que vous avez établi. De cette façon, chaque groupe doit déplacer son Clawbot sur la même distance pour accomplir la tâche requise et assurer l'équité.
-
Pour un défi plus complexe, demandez aux élèves de retourner les objets à la base et de les empiler. Le groupe qui termine sa pile en premier gagne.
Gemmes colorées
Le but de cette activité est d'utiliser vos compétences de Clawbot pour collecter plusieurs objets, un à la fois, et les renvoyer à un endroit plus rapidement que les autres groupes de votre classe. Bonne chance !
Voici quelques étapes pour guider votre équipe :
- Déplacez les objets de votre groupe derrière la zone de récupération d'objets que votre professeur a établie, et assurez-vous que votre Clawbot a de l'espace pour se déplacer sans interférer avec les autres groupes.
- Énumérez les étapes dont le Clawbot aura besoin pour saisir chaque objet et les ramener à la base. Assurez-vous d'inclure les boutons que vous utiliserez pour accomplir cette tâche !
- Écrivez les étapes que le pilote énumère dans le cahier d'ingénierie.
- À l'aide de l'horloge de la salle de classe ou d'une montre, conservez l'heure et enregistrez-la dans votre cahier d'ingénierie.
- Récupérez chaque objet aussi rapidement que possible.
Félicitations ! Vous avez collecté les trois objets de votre groupe, les avez retournés à la base avec votre Clawbot à l'aide du contrôleur !
![]() Boîte à outils de l'enseignant
-
Avant la troisième activité
Boîte à outils de l'enseignant
-
Avant la troisième activité
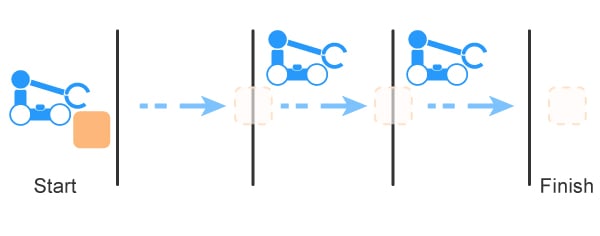
Avant le début de la troisième activité (Course de relais !), assurez-vous que les élèves sont toujours dans leurs petits groupes de 2 ou 4 élèves. L'objectif est de transporter un objet sur un parcours de trois mètres. Une personne du groupe ramassera l'objet à l'aide du Clawbot et le conduira vers l'avant pour le transporter sur un mètre. Ils laisseront ensuite tomber l'objet. La personne suivante dans le groupe prendra l'objet et le portera pour la deuxième étape, où elle déposera également l'objet. La troisième personne du groupe terminera la course de relais en portant l'objet pour la troisième étape et en le laissant tomber sur la ligne d'arrivée.
Demandez à l'un des membres du groupe de surveiller l'heure. Cette personne doit également s'assurer que le Clawbot n'obstrue aucun autre conducteur ou étudiant et vérifier que le robot place l'objet suffisamment loin au-dessus de la ligne.
Si le temps le permet, relevez le défi plus d'une fois pour vous assurer que tous les membres du groupe ont une chance de conduire le robot.
Course de relais !
Le but de cette activité est d'utiliser vos compétences de Clawbot et de travail d'équipe dans une course de relais. Le groupe sera responsable du déplacement d'un objet sur un parcours de trois mètres dans les plus brefs délais.
Joueur 1 : Choisissez l'objet et transportez-le jusqu'à la ligne d'un mètre. Lâchez l'objet.
Joueur 2 : Ramassez l'objet et transportez-le de la ligne d'un à la ligne de deux mètres. Lâchez l'objet.
Joueur 3 : Ramassez l'objet et transportez-le de la ligne de deux mètres à la ligne d'arrivée. Déposez l'objet dans la zone de l'objectif.
Joueur 4 : Surveillez l'heure et assurez-vous que le Clawbot n'obstrue aucun autre conducteur ou étudiant. Assurez-vous que le robot place l'objet suffisamment loin sur la ligne.