Desafios de remix: Clawbot Control - Python
![]() Caixa de ferramentas do professor
-
antes da primeira atividade
Caixa de ferramentas do professor
-
antes da primeira atividade
-
Coloque os alunos em grupos de 2 ou 4 alunos. Um aluno deve ser designado como Condutor - o aluno que utiliza o controlador para conduzir o Clawbot.
-
Os objetos podem ser qualquer material/objeto de sala de aula que tenha à mão (borracha, rolo de fita-cola, caixa de lenços de papel) e podem ser distribuídos aos grupos de alunos no início desta atividade. Cada grupo necessitará apenas de um objeto para a primeira atividade, “Apanha um Objeto!” e três objetos para as outras duas atividades.
-
Se o tempo permitir em qualquer uma das atividades de remistura, peça aos alunos que se revezem como motorista.
-
O controlador deve ser capaz de concluir os seguintes passos:
-
Usando o botão R2, abre a Garra.
-
Utilizando os Joysticks, move o teu Clawbot de modo a que o teu objeto fique posicionado dentro do Claw aberto.
-
Utilizando o botão R1, feche a Garra.
-
Para libertar o objeto, abra novamente a Garra utilizando o botão R2.
-
Pegue num objeto!
O objetivo desta atividade é agarrar e largar um objeto com o Clawbot utilizando o Controlador.
Aqui estão alguns passos para orientar o seu grupo:
- Coloque o objeto do seu grupo no chão e certifique-se de que o seu Clawbot tem espaço suficiente para se mover sem interferir com os outros grupos.
- Liste os passos que o Clawbot necessitará para capturar o objeto. Certifique-se de incluir quais os botões que irá utilizar para realizar esta tarefa!
- Escreva os passos que o condutor lista no caderno de engenharia.
-
Clique no botão Download da barra de ferramentas para descarregar o projeto Clawbot Control para o Robot Brain.

-
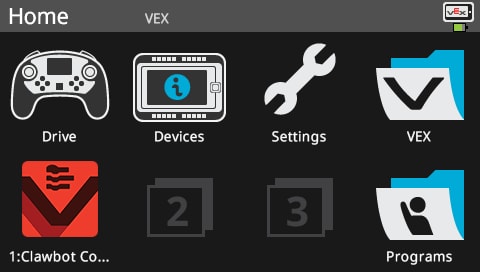
Verifique se o download do seu projeto foi feito no Clawbot's Brain olhando para o ecrã do Robot Brain. O nome do projeto, Clawbot Control, deve estar listado no slot 1.
- Execute o projeto no Clawbot.
- Apanhar e largar um objeto com o Clawbot usando o Controller.
Parabéns! Apanhou um objeto com o seu Clawbot usando o Controller!
Houve alguma diferença entre as suas previsões e as ações que realizou durante a atividade? Nesse caso, adicione-os ao seu caderno de engenharia.
![]() Caixa de ferramentas do professor
-
antes da segunda atividade
Caixa de ferramentas do professor
-
antes da segunda atividade
-
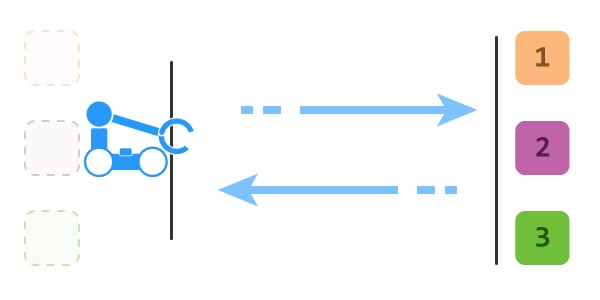
Antes do início da segunda atividade (gemas coloridas), peça a cada grupo que alinhe os seus Clawbots num dos lados da sala. Marque este local inicial com um objeto ou uma linha de fita adesiva no chão. No lado oposto da sala, determine uma área de recuperação de objetos colocando um objeto no chão que seja equidistante dos locais base de cada grupo. Pode ser um objeto de sala de aula ou até uma linha de fita adesiva no chão. Instrua os grupos que devem colocar os três objetos na área de recuperação, atrás do ponto ou linha que estabeleceu. Desta forma, cada grupo deve mover o seu Clawbot à mesma distância para realizar a tarefa necessária e garantir a justiça.
-
Para um desafio mais complexo, peça aos alunos que devolvam os objetos à base e os empilhem. Ganha o grupo que completar a pilha primeiro.
Gemas coloridas
O objetivo desta atividade é utilizar as suas habilidades de Clawbot para recolher vários objetos, um de cada vez, e devolvê-los a um local mais rapidamente do que os outros grupos da sua classe. Boa sorte!
Aqui estão alguns passos para orientar a sua equipa:
- Mova os objetos do seu grupo para trás da área de recuperação de objetos que o seu professor estabeleceu e certifique-se de que o seu Clawbot tem espaço para se mover sem interferir com outros grupos.
- Enumera os passos que o Clawbot precisará para pegar em cada objeto e devolvê-los à base. Certifique-se de incluir quais os botões que irá utilizar para realizar esta tarefa!
- Escreva os passos que o Driver lista no caderno de engenharia.
- Utilizando o relógio da sala de aula ou um relógio, marque o tempo e registe-o no seu caderno de engenharia.
- Recupere cada objeto o mais rápido que conseguir.
Parabéns! Recolheste todos os três objetos do teu grupo e devolveste-os à base com o teu Clawbot usando o Controlador!
![]() Caixa de ferramentas do professor
-
antes da terceira atividade
Caixa de ferramentas do professor
-
antes da terceira atividade
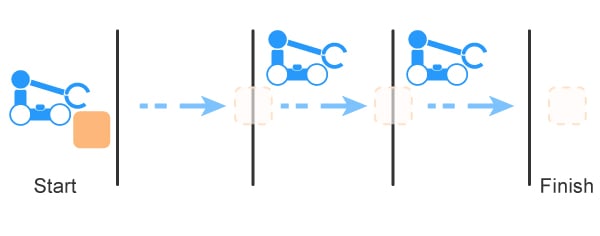
Antes do início da terceira atividade (Corrida de Estafetas!), certifique-se de que os alunos ainda estão nos seus pequenos grupos de 2 ou 4 alunos. O objetivo é transportar um objeto ao longo de um percurso de três metros. Uma pessoa do grupo irá apanhar o objeto usando o Clawbot e avançar para o transportar por um metro. Eles largarão então o objeto. A próxima pessoa do grupo irá pegar no objeto e carregá-lo para a segunda etapa, onde também deixará cair o objeto. A terceira pessoa do grupo terminará a corrida de estafetas carregando o objeto da terceira etapa e largando-o na linha de meta.
Peça a um dos elementos do grupo para monitorizar o tempo. Esta pessoa deve também garantir que o Clawbot não obstrui nenhum outro condutor ou aluno e verificar se o robô coloca o objeto suficientemente longe da linha.
Se o tempo permitir, jogue o desafio mais do que uma vez para garantir que todos os membros do grupo têm a oportunidade de conduzir o robô.
Corrida de estafetas!
O objetivo desta atividade é utilizar o seu Clawbot e as suas capacidades de trabalho em equipa numa corrida de estafetas. O grupo será responsável por mover um objeto ao longo de um percurso de três metros no menor tempo possível.
Jogador 1: Escolhe o objeto e leva-o até à linha de um metro. Solte o objeto.
Jogador 2: Pegue no objeto e carregue-o da linha de um para a linha dos dois metros. Solte o objeto.
Jogador 3: Pegue no objeto e leve-o da linha dos dois metros até à linha de chegada. Solte o objeto na área de baliza.
Jogador 4: Monitorize o tempo e certifique-se de que o Clawbot não obstrui nenhum outro condutor ou aluno. Certifique-se de que o robô coloca o objeto suficientemente longe da linha.