리믹스 챌린지: 클로봇 제어 - 파이썬
![]() 교사 도구 상자
-
첫 번째 활동 전
교사 도구 상자
-
첫 번째 활동 전
-
학생들을 2명 또는 4명씩 그룹으로 나누세요. 한 명의 학생을 운전자로 지정해야 합니다. 운전자는 컨트롤러를 사용하여 클로봇을 운전해야 합니다.
-
수업에 필요한 물건은 교실에서 쉽게 구할 수 있는 물건(지우개, 테이프 롤, 티슈 상자)이면 되고, 이 활동을 시작할 때 학생 그룹에게 나눠줄 수 있습니다. 각 그룹은 첫 번째 활동인 "물건을 잡아라!"를 위해 물건 하나만 필요하고, 나머지 두 활동을 위해서는 물건 세 개가 필요합니다.
-
리믹스 활동에서 시간이 허락한다면 학생들에게 운전자 역할을 번갈아 맡게 하세요.
-
운전자는 다음 단계를 완료할 수 있어야 합니다.
-
R2 버튼을 사용하여 클로를 엽니다.
-
조이스틱을 사용하여 Clawbot을 움직여 물체가 열린 Claw 내부에 위치하도록 합니다.
-
R1 버튼을 사용하여 클로를 닫습니다.
-
물체를 놓으려면 R2 버튼을 사용하여 클로를 다시 한 번 여세요.
-
물건을 잡으세요!
이 활동의 목표는 컨트롤러를 사용하여 Clawbot으로 개체를 잡고 놓는 것입니다.
그룹을 이끄는 몇 가지 단계는 다음과 같습니다.
- 그룹의 물건을 바닥에 놓고 Clawbot에 다른 그룹을 방해하지 않고 움직일 수 있는 충분한 공간이 있는지 확인하십시오.
- Clawbot이 물체를 잡는 데 필요한 단계를 나열합니다. 이 작업을 수행하는 데 사용할 버튼을 포함해야 합니다!
- 엔지니어링 노트에 드라이버 파트너가 나열한 단계를 작성합니다.
-
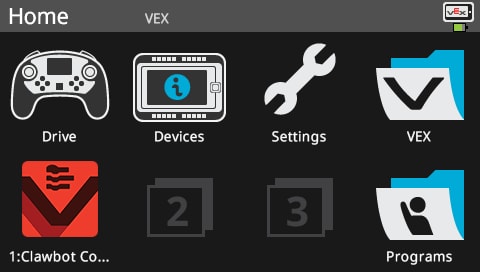
도구 모음에서 다운로드 버튼을 클릭하여 로봇 뇌에 Clawbot 제어 프로젝트를 다운로드합니다.

-
로봇 뇌의 화면을 보고 프로젝트가 Clawbot의 뇌로 다운로드되었는지 확인하십시오. 프로젝트 이름인 Clawbot Control은 슬롯 1에 나열되어야 합니다.
- Clawbot에서 프로젝트를 합니다.
- 컨트롤러를 사용하여 Clawbot으로 개체를 잡고 놓습니다.
축하합니다! 컨트롤러를 사용하여 클로봇으로 물건을 잡았습니다!
활동 중에 예측한 것과 실제로 취한 행동 사이에 차이가 있었나요? 그렇다면 엔지니어링 노트에 추가하세요.
![]() 교사 도구 상자
-
두 번째 활동 전
교사 도구 상자
-
두 번째 활동 전
-
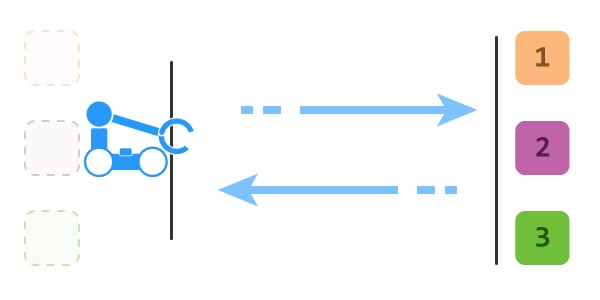
두 번째 활동(색깔 보석)을 시작하기 전에 각 그룹이 자신의 클로봇을 방 한쪽에 일렬로 세웁니다. 바닥에 있는 물체나 테이프로 시작 위치를 표시하세요. 방의 반대편에서는 각 그룹의 홈베이스 위치에서 같은 거리에 있는 바닥에 물건을 놓아서 물건 회수 구역을 정합니다. 이는 교실의 물건일 수도 있고, 심지어 바닥에 늘어놓은 테이프일 수도 있습니다. 각 조에 자신이 가지고 있는 물건 3개를 모두 여러분이 정한 지점이나 선 뒤의 회수 구역에 놓아야 한다고 지시합니다. 이런 방식으로 각 그룹은 필요한 작업을 완수하고 공정성을 보장하기 위해 자신의 클로봇을 동일한 거리만큼 이동해야 합니다.
-
좀 더 복잡한 과제를 원하면 학생들에게 물건을 홈베이스로 돌려놓고 쌓게 하세요. 스택을 가장 먼저 완성하는 그룹이 승리합니다.
유색 보석
이 활동의 목표는 Clawbot 기술을 사용하여 한 번에 하나씩 여러 개체를 수집하고 다른 그룹보다 빠르게 위치로 반환하는 것입니다. 행운을 빕니다!
팀을 이끄는 몇 가지 단계는 다음과 같습니다.
- 교사가 설정한 개체 검색 영역 뒤로 그룹의 개체를 이동하고 Clawbot에 다른 그룹을 방해하지 않고 이동할 수 있는 공간이 있는지 확인하십시오.
- Clawbot이 각 개체를 잡고 홈 베이스로 반환하는 데 필요한 단계를 나열합니다. 이 작업을 수행하는 데 사용할 버튼을 포함해야 합니다!
- 엔지니어링 노트에 드라이버 파트너가 나열한 단계를 작성합니다.
- 교실 시계 또는 시계를 사용하여 시간을 유지하고 엔지니어링 노트에 기록하십시오.
- 가능한 한 빨리 각 개체를 가져옵니다.
축하합니다! 그룹의 세 개 개체를 모두 수집하고 컨트롤러를 사용하여 Clawbot으로 홈 베이스로 반환했습니다!
![]() 교사 도구 상자
-
세 번째 활동 전
교사 도구 상자
-
세 번째 활동 전
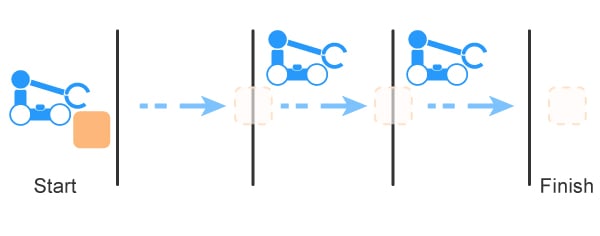
세 번째 활동(릴레이 경주!)을 시작하기 전에 학생들이 여전히 2~4명의 소그룹에 있는지 확인하세요. 목표는 물체를 3미터 길이로 옮기는 것입니다. 그룹 중 한 명이 클로봇을 사용하여 물건을 집어 들고 앞으로 달려가 1미터 동안 운반합니다. 그러면 그들은 그 물건을 떨어뜨릴 것입니다. 그룹의 다음 사람이 그 물건을 집어 들고 두 번째 구간으로 운반한 후, 그 구간에서도 그 물건을 떨어뜨립니다. 그룹의 세 번째 사람은 세 번째 구간의 물건을 들고 결승선을 통과하여 떨어뜨려 릴레이 경주를 마칩니다.
그룹 구성원 중 한 명에게 시간을 모니터링해 달라고 요청합니다. 이 사람은 또한 클로봇이 다른 운전자나 학생을 방해하지 않는지 확인해야 하며, 로봇이 물체를 선을 넘어 충분히 멀리 놓는지도 확인해야 합니다.
시간이 허락한다면 모든 그룹 구성원이 로봇을 운전할 기회를 가질 수 있도록 도전과제를 두 번 이상 플레이하세요.
릴레이 레이스!
이 활동의 목표는 릴레이 레이스에서 Clawbot과 팀워크 기술을 사용하는 것입니다. 그룹은 가능한 가장 빠른 시간 안에 3미터 코스를 가로질러 물체를 옮겨야 합니다.
플레이어 1:물체를 집어서 1미터 선까지 운반하세요. 물건을 떨어뜨리세요.
플레이어 2:물건을 집어 들고 1미터 선에서 2미터 선까지 옮기세요. 물건을 떨어뜨립니다.
플레이어 3:물건을 집어 들고 2미터 선에서 결승선까지 운반합니다. 목표 구역에 물건을 떨어뜨리세요.
플레이어 4:시간을 모니터링하고 클로봇이 다른 운전자나 학생을 방해하지 않는지 확인하세요. 로봇이 물체를 선 너머로 충분히 멀리 놓아야 합니다.