
पृष्ठभूमि
मंगल रोवर: सतही परिचालन इकाई आपको और आपके विद्यार्थियों को किसी समस्या के समाधान के लिए VEXcode GO परियोजनाओं के निर्माण से परिचित कराएगी। पर्सिवियरेंस रोवर और मार्स 2020 मिशन की गतिविधियों को उन चुनौतियों के लिए प्रेरणा के रूप में उपयोग किया जाता है, जिन पर छात्र VEXcode GO और कोड बेस का उपयोग करके काम करेंगे। उनके द्वारा बनाई गई परियोजनाओं को नमूने एकत्र करने और उन्हें 'दफनाने' के लिए सही ढंग से अनुक्रमित करने की आवश्यकता होगी।
नासा का मंगल 2020 मिशन
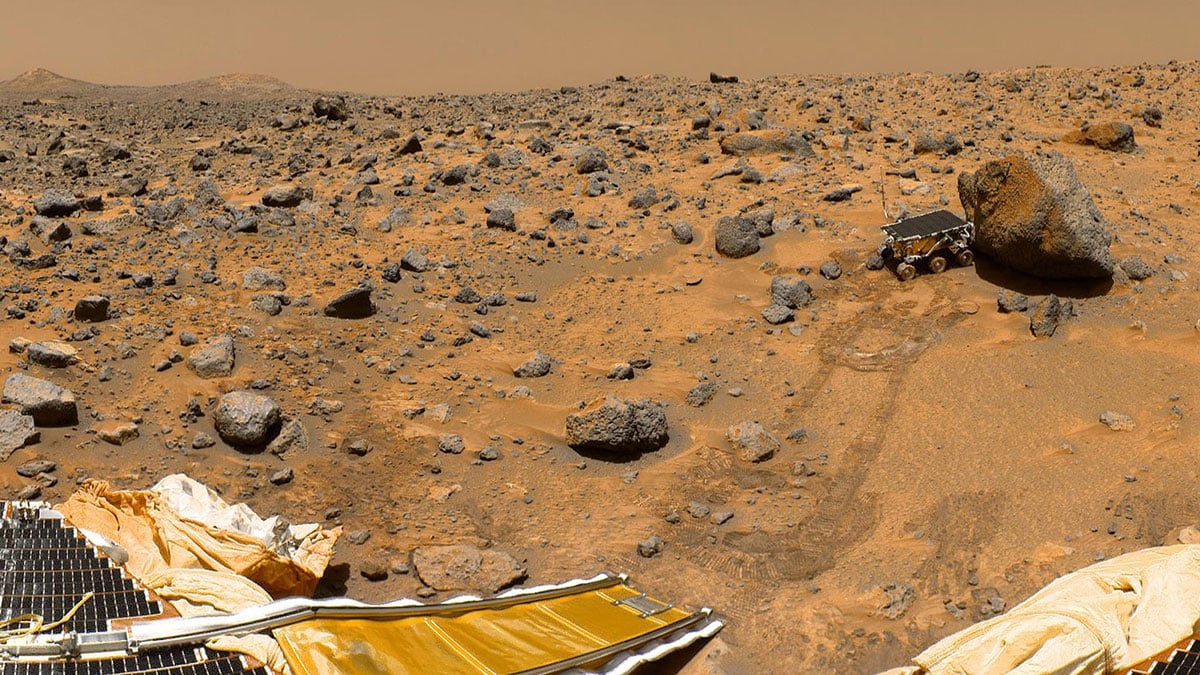
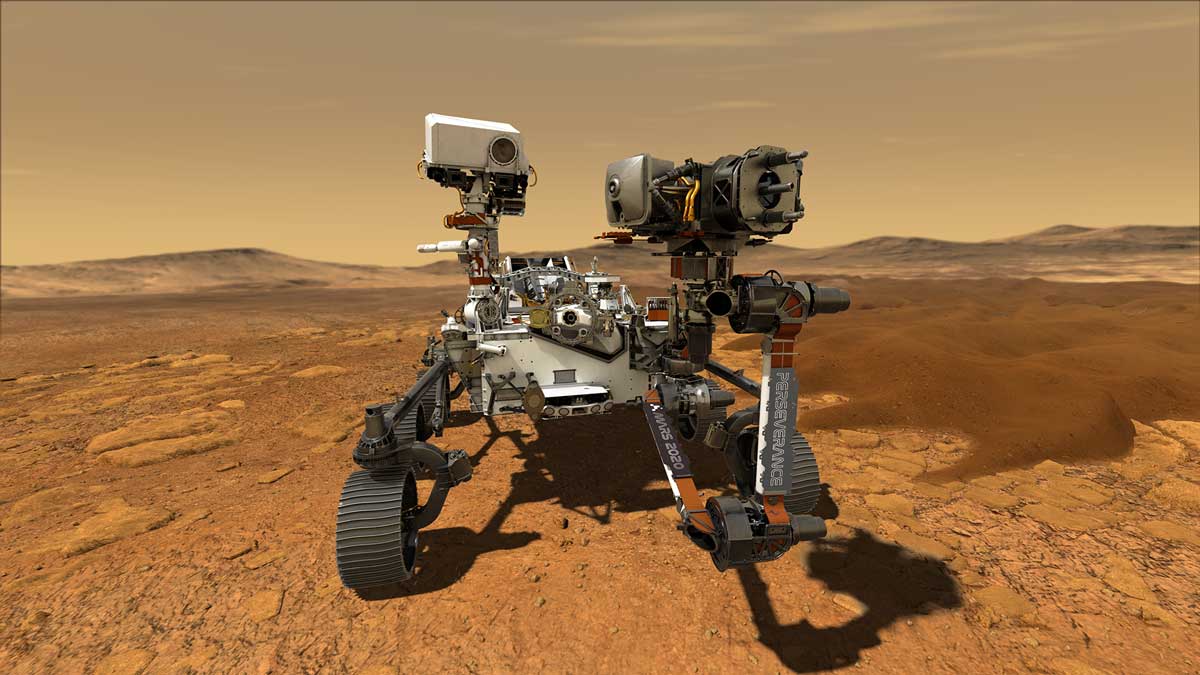
नासा का मंगल 2020 मिशन मंगल ग्रह के अन्वेषण के लिए उच्च प्राथमिकता वाले विज्ञान लक्ष्यों को संबोधित करता है: जीवन, जलवायु, भूविज्ञान और मानव। पर्सिवियरेंस रोवर लाल ग्रह पर अनुसंधान में मदद के लिए डेटा एकत्र करने हेतु सतह पर कार्य पूरा करेगा।
रोवर क्या है?
रोवर एक ऐसा उपकरण है जिसे किसी ग्रह या अन्य खगोलीय पिंड (जैसे चंद्रमा) की ठोस सतह पर घूमने के लिए डिज़ाइन किया गया है। कुछ रोवर्स को अंतरिक्ष चालक दल के सदस्यों को ले जाने के लिए डिज़ाइन किया गया है, जबकि अन्य आंशिक या पूर्णतः स्वायत्त रोबोट हैं। इन रोबोटों को आम तौर पर इलाके के बारे में जानकारी एकत्र करने और चट्टानों, गंदगी, मिट्टी या यहां तक कि तरल पदार्थों के नमूने एकत्र करने का काम सौंपा जाता है।
सतही परिचालन क्या हैं?
सतही संचालन वे वैज्ञानिक अध्ययन हैं जिन्हें रोवर मंगल ग्रह पर पूरा करेगा। ये सभी भूवैज्ञानिक नमूनों को खोजने, एकत्र करने और संग्रहीत करने पर केंद्रित हैं। शुरुआत में, पर्सिवियरेंस आकर्षक चट्टानों की तलाश करेगा। किसी चट्टान को तभी सम्मोहक माना जा सकता है, जब उसमें प्राचीन जीवन के रासायनिक निशान संरक्षित होने की संभावना हो, या सूक्ष्मजीवी जीवन को समर्थन देने वाले वातावरण द्वारा उसमें परिवर्तन किया गया हो।
आकर्षक चट्टानों की पहचान करने के बाद, पर्सिवियरेंस एक नमूना ड्रिल करेगा, उसे एक सीलबंद ट्यूब में रखेगा, और उन्हें सतह पर संग्रहीत करेगा। इस मिशन के दौरान प्रयुक्त डिपो कैशिंग वह है, जहां एक ही स्थान पर कई नमूने छोड़ दिए जाते हैं या दफना दिए जाते हैं। इसके बाद एक भावी मिशन इन नमूनों को पुनः प्राप्त कर सकेगा और उन्हें पृथ्वी पर वैज्ञानिकों को वापस लौटा सकेगा।
अनुक्रम क्या है?
अनुक्रम वह विशिष्ट क्रम है जिसमें व्यवहार निष्पादित किये जाते हैं। एक क्रिया या घटना अनुक्रम में अगली क्रमबद्ध क्रिया की ओर ले जाती है। कोड बेस के लिए अनुक्रमण महत्वपूर्ण है, क्योंकि रोबोट केवल उसी प्रकार चलेगा जैसा कि आदेश उसे बताएंगे।
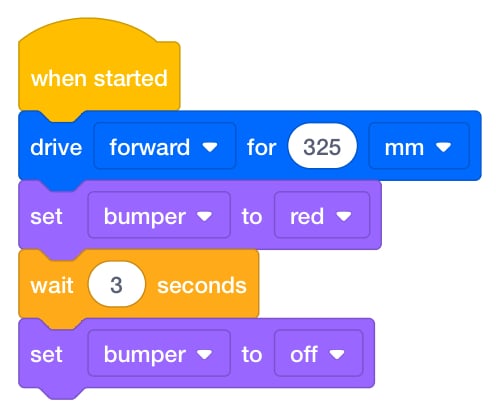
इस एनीमेशन में, आप देख सकते हैं कि कैसे परियोजना शीर्ष पर {When started} ब्लॉक से शुरू होती है, फिर प्रत्येक ब्लॉक को ऊपर से नीचे तक क्रम में निष्पादित किया जाता है। कोड बेस GO फील्ड पर 325 मिलीमीटर (मिमी) तक आगे बढ़ता है, 2 सेकंड तक प्रतीक्षा करता है, फिर LED बम्पर पर एक रंग चमकता है। ब्लॉकों के चारों ओर हरे रंग का हाइलाइट फीचर यह बताता है कि उस समय कौन सा ब्लॉक चल रहा है। इससे छात्रों को कोड बेस के व्यवहार को विशिष्ट VEXcode GO ब्लॉकों के साथ जोड़ने के लिए तत्काल फीडबैक मिल सकता है।
किसी परियोजना को क्रमबद्ध करने के चरण
-
सबसे पहले, लक्ष्य की पहचान करें—क्या करने की आवश्यकता है? उदाहरण के लिए, शुरुआत से लेकर पहले नमूने तक ड्राइव करें।
ऑब्जेक्ट तक ड्राइव करें -
फिर, लक्ष्य को पूरा करने के लिए आवश्यक चरणों को विभाजित करें, और इन चरणों को पूरा करने के लिए आवश्यक अवरोधों की पहचान करें। यहां आपको नमूने तक पहुंचने के लिए 325 मिलीमीटर (मिमी) आगे बढ़ना होगा, फिर एलईडी बम्पर सेंसर को लाल रंग में चमकने के लिए सेट करना होगा ताकि यह पता चल सके कि यह एक नमूना एकत्र कर रहा है, नमूना एकत्र करने के लिए 3 सेकंड प्रतीक्षा करें, फिर एलईडी बम्पर सेंसर की चमक को रोकें या बंद करें ताकि यह संकेत मिले कि नमूना एकत्र किया गया था। यह [ड्राइव फॉर], [वेट], और [बम्पर कलर सेट करें] ब्लॉक के साथ पूरा किया जा सकता है।

[ड्राइव करें], [प्रतीक्षा करें], और [बम्पर रंग सेट करें] ब्लॉक
-
इसके बाद, मिलान वाले ब्लॉकों को कार्यक्षेत्र में खींचकर और उन्हें ऊपर से नीचे तक {When started} ब्लॉक से जोड़कर परियोजना के अनुक्रम की योजना बनाएं। जैसे ही प्रत्येक ब्लॉक जोड़ा जाता है, पहले बताए गए चरणों से मेल खाने के लिए पैरामीटर बदलें।
-
प्रोजेक्ट का परीक्षण करने के लिए “प्रारंभ” का चयन करें और देखें कि क्या कोड बेस पहले चरण में पहचाने गए लक्ष्य को पूरा करता है।
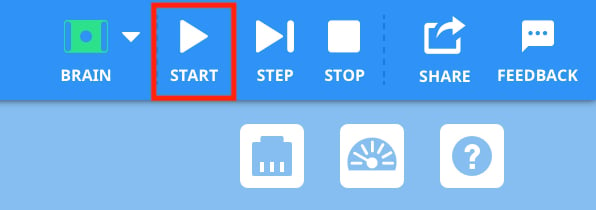
'प्रारंभ' चुनें
यदि आप अपनी परियोजना में परिवर्तन करना चाहते हैं, तो बस पैरामीटर बदलें, या पुनः परीक्षण करने से पहले परियोजना में ब्लॉक जोड़ें या हटाएँ।
VEXcode GO क्या है?
VEXcode GO एक कोडिंग वातावरण है जिसका उपयोग VEX GO रोबोट के साथ संचार करने के लिए किया जाता है। छात्र VEXcode GO प्रोजेक्ट बनाने के लिए ड्रैग और ड्रॉप इंटरफ़ेस का उपयोग करते हैं जो उनके रोबोट की गतिविधियों को नियंत्रित करते हैं। प्रत्येक ब्लॉक का उद्देश्य उसके आकार, रंग और लेबल जैसे दृश्य संकेतों का उपयोग करके पहचाना जा सकता है। VEXcode GO के साथ काम करने के तरीके के बारे में अधिक जानकारी के लिए, VEX लाइब्रेरीका VEXcode GO अनुभाग देखें।
इस इकाई में निम्नलिखित VEXcode GO ब्लॉक का उपयोग किया जाएगा:
| VEXcode GO ब्लॉक | व्यवहार |
|---|---|
 |
जब परियोजना शुरू होती है तो {When start} ब्लॉक, ब्लॉकों के संलग्न स्टैक को चलाना शुरू कर देता है। |
 |
[ड्राइव फॉर] ब्लॉक ड्राइवट्रेन को एक निश्चित दूरी तक आगे या पीछे ले जाता है। अंडाकार में मान दर्ज करके निर्धारित करें कि ड्राइवट्रेन कितनी दूर तक जाएगा। |
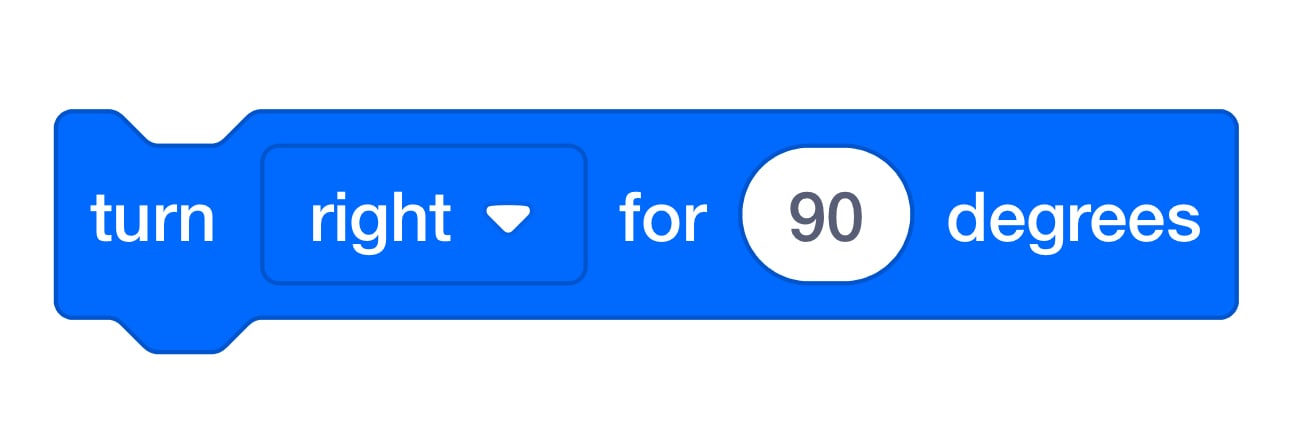 |
[टर्न फॉर] ब्लॉक ड्राइवट्रेन को एक निश्चित दूरी तक घुमाता है। अंडाकार में मान दर्ज करके निर्धारित करें कि ड्राइवट्रेन कितनी दूर तक घूमेगा। |
 |
[प्रतीक्षा] ब्लॉक किसी प्रोजेक्ट में अगले ब्लॉक पर जाने से पहले एक विशिष्ट समय तक प्रतीक्षा करता है। |
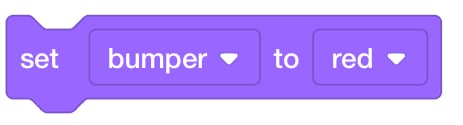 |
[बम्पर रंग सेट करें] ब्लॉक एलईडी बम्पर का रंग सेट करता है। |