
പശ്ചാത്തലം
മാർസ് റോവർ: സർഫസ് ഓപ്പറേഷൻസ് യൂണിറ്റ് നിങ്ങൾക്കും നിങ്ങളുടെ വിദ്യാർത്ഥികൾക്കും ഒരു പ്രശ്നം പരിഹരിക്കുന്നതിനായി VEXcode GO പ്രോജക്ടുകൾ നിർമ്മിക്കുന്നതിന് പരിചയപ്പെടുത്തും. VEXcode GO, കോഡ് ബേസ് എന്നിവ ഉപയോഗിച്ച് വിദ്യാർത്ഥികൾ കൈകാര്യം ചെയ്യുന്ന വെല്ലുവിളികൾക്ക് പ്രചോദനമായി പെർസെവറൻസ് റോവറിന്റെയും മാർസ് 2020 മിഷന്റെയും പ്രവർത്തനങ്ങൾ ഉപയോഗിക്കുന്നു. സാമ്പിളുകൾ ശേഖരിച്ച് 'കുഴിച്ചിടാൻ' അവർ സൃഷ്ടിക്കുന്ന പ്രോജക്ടുകൾ കൃത്യമായി ക്രമപ്പെടുത്തേണ്ടതുണ്ട്.
നാസയുടെ ചൊവ്വ 2020 ദൗത്യം
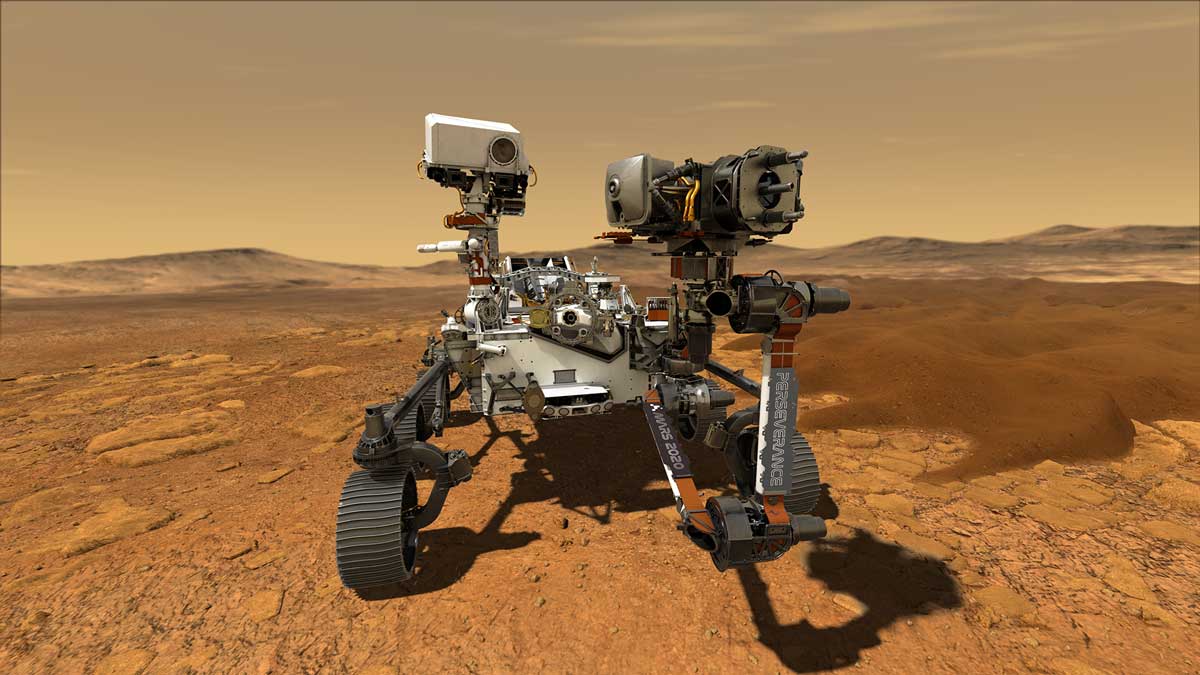
നാസയുടെ മാർസ് 2020 ദൗത്യം ചൊവ്വ പര്യവേക്ഷണത്തിനായുള്ള ഉയർന്ന മുൻഗണനയുള്ള ശാസ്ത്ര ലക്ഷ്യങ്ങളെ അഭിസംബോധന ചെയ്യുന്നു: ജീവൻ, കാലാവസ്ഥ, ഭൂമിശാസ്ത്രം, മനുഷ്യർ. ചുവന്ന ഗ്രഹത്തെക്കുറിച്ചുള്ള ഗവേഷണത്തിന് സഹായകമായ വിവരങ്ങൾ ശേഖരിക്കുന്നതിനുള്ള ഉപരിതല പ്രവർത്തനങ്ങൾ പെർസെവെറൻസ് റോവർ പൂർത്തിയാക്കും.
എന്താണ് ഒരു റോവർ?
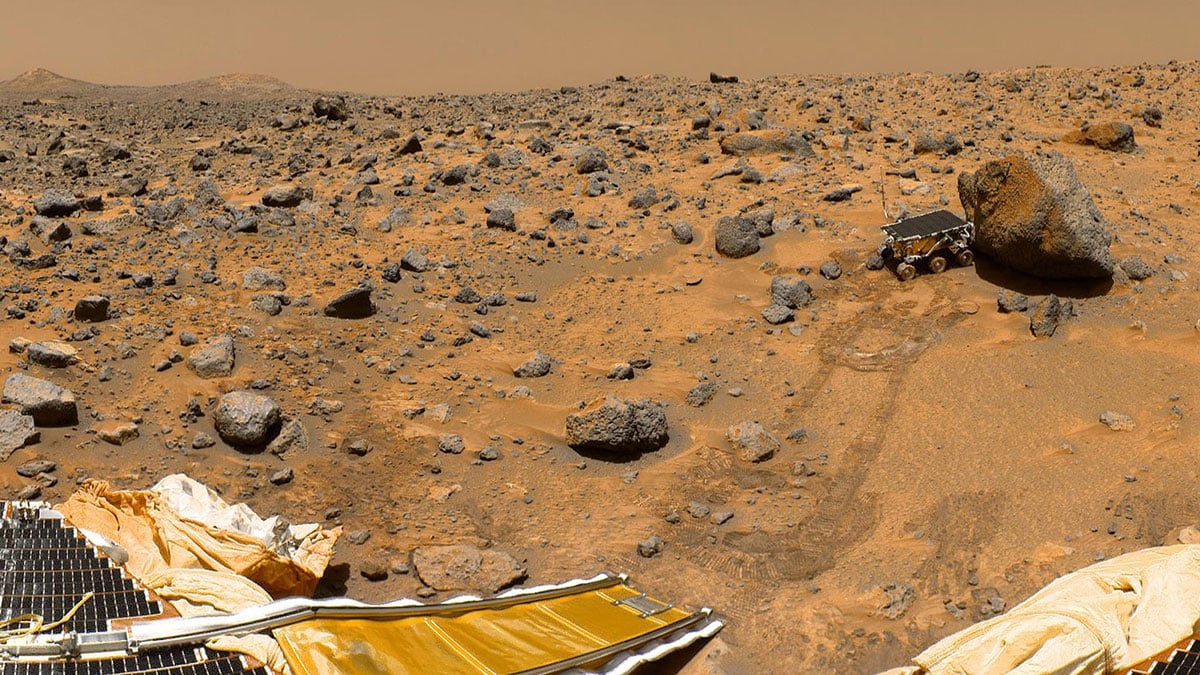
ഒരു ഗ്രഹത്തിന്റെയോ മറ്റ് ആകാശഗോളത്തിന്റെയോ (ചന്ദ്രനെപ്പോലെ) ഖര പ്രതലത്തിലൂടെ സഞ്ചരിക്കാൻ രൂപകൽപ്പന ചെയ്ത ഉപകരണമാണ് റോവർ. ചില റോവറുകൾ ഒരു ബഹിരാകാശ സംഘത്തിലെ അംഗങ്ങളെ കൊണ്ടുപോകാൻ രൂപകൽപ്പന ചെയ്തിട്ടുള്ളതാണ്, മറ്റുള്ളവ ഭാഗികമായോ പൂർണ്ണമായോ സ്വയംഭരണമുള്ള റോബോട്ടുകളാണ്. ഭൂപ്രദേശത്തെക്കുറിച്ചുള്ള വിവരങ്ങൾ ശേഖരിക്കുകയും പാറകൾ, അഴുക്ക്, മണ്ണ്, അല്ലെങ്കിൽ ദ്രാവകങ്ങൾ എന്നിവയുടെ സാമ്പിളുകൾ ശേഖരിക്കുകയും ചെയ്യുക എന്നതാണ് ഈ റോബോട്ടുകളുടെ പൊതുവെ ചുമതല.
ഉപരിതല പ്രവർത്തനങ്ങൾ എന്തൊക്കെയാണ്?
ചൊവ്വയിൽ റോവർ പൂർത്തിയാക്കുന്ന ശാസ്ത്രീയ പഠനങ്ങളാണ് ഉപരിതല പ്രവർത്തനങ്ങൾ. ഇവയെല്ലാം ഭൂമിശാസ്ത്രപരമായ സാമ്പിളുകൾ കണ്ടെത്തുന്നതിലും ശേഖരിക്കുന്നതിലും കാഷെ ചെയ്യുന്നതിലും ശ്രദ്ധ കേന്ദ്രീകരിക്കുന്നു. ആദ്യം, പെർസെവെറൻസ് ആകർഷകമായ പാറകൾ തേടും. ഒരു പാറയ്ക്ക് പുരാതന ജീവിതത്തിന്റെ രാസ അവശിഷ്ടങ്ങൾ സംരക്ഷിക്കപ്പെടാനുള്ള സാധ്യതയുണ്ടെങ്കിൽ അല്ലെങ്കിൽ സൂക്ഷ്മജീവികളുടെ ജീവിതത്തെ പിന്തുണച്ച ഒരു പരിസ്ഥിതിയാൽ മാറ്റം വരുത്തപ്പെട്ടിട്ടുണ്ടെങ്കിൽ അത് ആകർഷകമായി കണക്കാക്കാം.
ശക്തമായ പാറകളെ തിരിച്ചറിഞ്ഞ ശേഷം, പെർസെവറൻസ് ഒരു സാമ്പിൾ തുരന്ന് ഒരു സീൽ ചെയ്ത ട്യൂബിൽ സ്ഥാപിച്ച് ഉപരിതലത്തിൽ സൂക്ഷിക്കും. ഈ ദൗത്യത്തിൽ ഉപയോഗിക്കുന്ന ഡിപ്പോ കാഷിംഗ്, ഒന്നിലധികം സാമ്പിളുകൾ ഒരേ സ്ഥലത്ത് ഉപേക്ഷിക്കുകയോ കുഴിച്ചിടുകയോ ചെയ്യുന്ന സ്ഥലമാണ്. ഭാവിയിലെ ഒരു ദൗത്യത്തിന് ഈ സാമ്പിളുകൾ വീണ്ടെടുത്ത് ഭൂമിയിലെ ശാസ്ത്രജ്ഞർക്ക് തിരികെ നൽകാൻ കഴിയും.
ഒരു ശ്രേണി എന്താണ്?
പെരുമാറ്റങ്ങൾ നിർവഹിക്കപ്പെടുന്ന നിർദ്ദിഷ്ട ക്രമമാണ് ഒരു ശ്രേണി. ഒരു പ്രവൃത്തിയോ സംഭവമോ ഒരു ക്രമത്തിൽ അടുത്ത ക്രമീകൃത പ്രവർത്തനത്തിലേക്ക് നയിക്കുന്നു. കോഡ് ബേസിന് സീക്വൻസിങ് പ്രധാനമാണ്, കാരണം കമാൻഡുകൾ പറയുന്നതുപോലെ മാത്രമേ റോബോട്ട് നീങ്ങുകയുള്ളൂ.
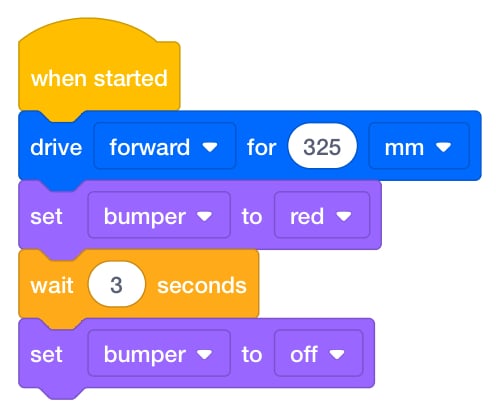
ഈ ആനിമേഷനിൽ, പ്രോജക്റ്റിന്റെ മുകളിലുള്ള {When started} ബ്ലോക്കിൽ നിന്ന് പ്രോജക്റ്റ് എങ്ങനെ ആരംഭിക്കുന്നുവെന്ന് നിങ്ങൾക്ക് കാണാൻ കഴിയും, തുടർന്ന് ഓരോ ബ്ലോക്കും മുകളിൽ നിന്ന് താഴേക്ക് ക്രമത്തിൽ നടപ്പിലാക്കുന്നു. ഒരു ഗോ ഫീൽഡിൽ കോഡ് ബേസ് 325 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) മുന്നോട്ട് നീങ്ങുന്നു, 2 സെക്കൻഡ് കാത്തിരിക്കുന്നു, തുടർന്ന് LED ബമ്പറിൽ ഒരു നിറം തിളങ്ങുന്നു. ബ്ലോക്കുകൾക്ക് ചുറ്റുമുള്ള പച്ച ഹൈലൈറ്റ് സവിശേഷത ആ നിമിഷം ഏത് വ്യക്തിഗത ബ്ലോക്കാണ് പ്രവർത്തിക്കുന്നതെന്ന് സൂചിപ്പിക്കുന്നു. കോഡ് ബേസിന്റെ പെരുമാറ്റരീതികളെ നിർദ്ദിഷ്ട VEXcode GO ബ്ലോക്കുകളുമായി ബന്ധിപ്പിക്കുന്നതിന് ഇത് വിദ്യാർത്ഥികൾക്ക് ഉടനടി ഫീഡ്ബാക്ക് നൽകും.
ഒരു പ്രോജക്റ്റ് ക്രമപ്പെടുത്തുന്നതിനുള്ള ഘട്ടങ്ങൾ
-
ആദ്യം, ലക്ഷ്യം തിരിച്ചറിയുക —എന്താണ് ചെയ്യേണ്ടത്? ഉദാഹരണത്തിന്, തുടക്കം മുതൽ ആദ്യ സാമ്പിൾ വരെ ഡ്രൈവ് ചെയ്യുക.
ഒബ്ജക്റ്റ് ലേക്ക് ഡ്രൈവ് ചെയ്യുക -
തുടർന്ന്, ലക്ഷ്യം നേടുന്നതിന് ആവശ്യമായ ഘട്ടങ്ങൾ വിഭജിക്കുക, ഈ ഘട്ടങ്ങൾ നേടുന്നതിന് ആവശ്യമായ ബ്ലോക്കുകൾ തിരിച്ചറിയുക. ഇവിടെ നിങ്ങൾ സാമ്പിളിൽ എത്താൻ 325 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) മുന്നോട്ട് നീങ്ങേണ്ടതുണ്ട്, തുടർന്ന് സാമ്പിൾ ശേഖരിക്കുന്നുണ്ടെന്ന് കാണിക്കാൻ LED ബമ്പർ സെൻസർ ചുവപ്പ് നിറത്തിൽ തിളങ്ങാൻ സജ്ജമാക്കുക, സാമ്പിൾ ശേഖരിക്കാൻ 3 സെക്കൻഡ് കാത്തിരിക്കുക, തുടർന്ന് സാമ്പിൾ ശേഖരിച്ചുവെന്ന് സൂചിപ്പിക്കുന്നതിന് LED ബമ്പർ സെൻസർ ഗ്ലോ നിർത്തുകയോ ഓഫാക്കുകയോ ചെയ്യുക. [Drive for], [Wait], [Set bumper color] എന്നീ ബ്ലോക്കുകൾ ഉപയോഗിച്ച് ഇത് സാധ്യമാക്കാം.

[ഡ്രൈവ് ഫോർ], [കാത്തിരിക്കുക], [ബമ്പർ നിറം സജ്ജമാക്കുക] ബ്ലോക്കുകൾ
-
അടുത്തതായി, പൊരുത്തപ്പെടുന്ന ബ്ലോക്കുകൾ വർക്ക്സ്പെയ്സിലേക്ക് വലിച്ചിട്ട് മുകളിൽ നിന്ന് താഴേക്ക് {When started} ബ്ലോക്കിലേക്ക് ഘടിപ്പിച്ചുകൊണ്ട് പ്രോജക്റ്റിന്റെ ക്രമം ആസൂത്രണം ചെയ്യുക. ഓരോ ബ്ലോക്കും ചേർക്കുമ്പോൾ, മുമ്പ് വിഭജിച്ച ഘട്ടങ്ങളുമായി പൊരുത്തപ്പെടുന്നതിന് പാരാമീറ്ററുകൾ മാറ്റുക.
-
പ്രോജക്റ്റ് പരീക്ഷിക്കുന്നതിനും ആദ്യ ഘട്ടത്തിൽ തിരിച്ചറിഞ്ഞ ലക്ഷ്യം കോഡ് ബേസ് നിറവേറ്റുന്നുണ്ടോ എന്ന് കാണുന്നതിനും "ആരംഭിക്കുക" തിരഞ്ഞെടുക്കുക.
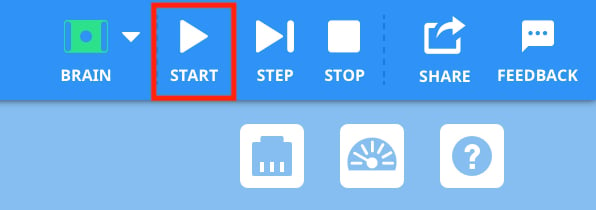
'ആരംഭിക്കുക' തിരഞ്ഞെടുക്കുക
നിങ്ങളുടെ പ്രോജക്റ്റ് മാറ്റണമെങ്കിൽ, പാരാമീറ്ററുകൾ മാറ്റുക, അല്ലെങ്കിൽ വീണ്ടും പരീക്ഷിക്കുന്നതിന് മുമ്പ് പ്രോജക്റ്റിൽ നിന്ന് ബ്ലോക്കുകൾ ചേർക്കുകയും നീക്കം ചെയ്യുകയും ചെയ്യുക.
എന്താണ് VEXcode GO?
VEXcode GO എന്നത് VEX GO റോബോട്ടുകളുമായി ആശയവിനിമയം നടത്താൻ ഉപയോഗിക്കുന്ന ഒരു കോഡിംഗ് പരിതസ്ഥിതിയാണ്. റോബോട്ടുകളുടെ പ്രവർത്തനങ്ങൾ നിയന്ത്രിക്കുന്ന VEXcode GO പ്രോജക്ടുകൾ സൃഷ്ടിക്കാൻ വിദ്യാർത്ഥികൾ ഡ്രാഗ് ആൻഡ് ഡ്രോപ്പ് ഇന്റർഫേസ് ഉപയോഗിക്കുന്നു. ഓരോ ബ്ലോക്കിന്റെയും ഉദ്ദേശ്യം അതിന്റെ ആകൃതി, നിറം, ലേബൽ തുടങ്ങിയ ദൃശ്യ സൂചനകൾ ഉപയോഗിച്ച് തിരിച്ചറിയാൻ കഴിയും. VEXcode GO, എങ്ങനെ പ്രവർത്തിക്കാം എന്നതിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക് VEX ലൈബ്രറിലെ VEXcode GO വിഭാഗം കാണുക.
ഈ യൂണിറ്റിൽ താഴെ പറയുന്ന VEXcode GO ബ്ലോക്കുകൾ ഉപയോഗിക്കും:
| VEXcode GO ബ്ലോക്കുകൾ | പെരുമാറ്റങ്ങൾ |
|---|---|
 |
പ്രോജക്റ്റ് ആരംഭിക്കുമ്പോൾ, {When start} ബ്ലോക്ക് ഘടിപ്പിച്ചിരിക്കുന്ന ബ്ലോക്കുകളുടെ സ്റ്റാക്ക് പ്രവർത്തിപ്പിക്കാൻ തുടങ്ങുന്നു. |
 |
[Drive for] ബ്ലോക്ക് ഡ്രൈവ്ട്രെയിനിനെ ഒരു നിശ്ചിത ദൂരം മുന്നോട്ടോ പിന്നോട്ടോ നീക്കുന്നു. ഓവലിൽ ഒരു മൂല്യം നൽകി ഡ്രൈവ്ട്രെയിൻ എത്ര ദൂരം നീങ്ങുമെന്ന് സജ്ജമാക്കുക. |
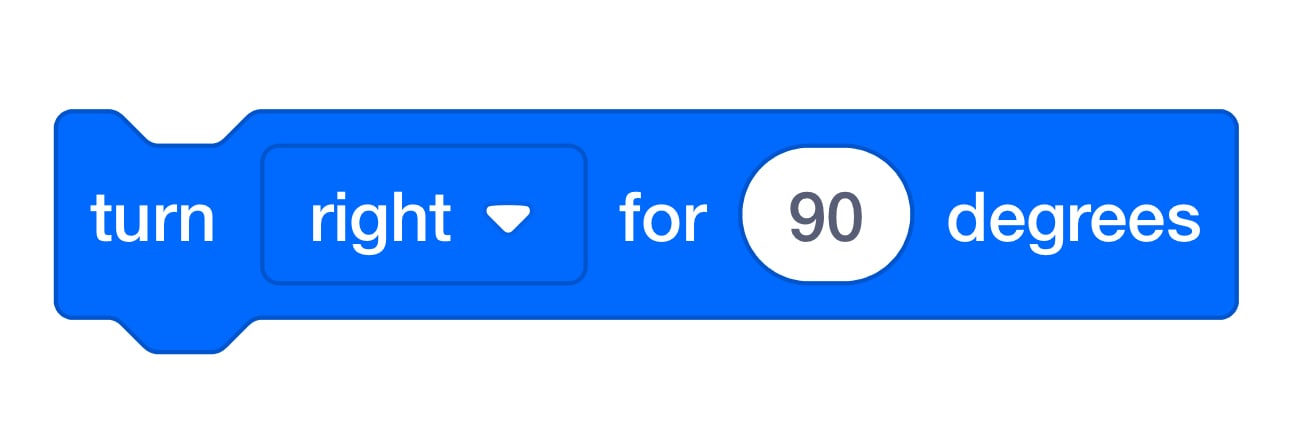 |
[ടേൺ ഫോർ] ബ്ലോക്ക് ഒരു നിശ്ചിത ദൂരത്തേക്ക് ഡ്രൈവ്ട്രെയിൻ തിരിക്കുന്നു. ഓവലിൽ ഒരു മൂല്യം നൽകി ഡ്രൈവ്ട്രെയിൻ എത്ര ദൂരം തിരിയണമെന്ന് സജ്ജമാക്കുക. |
 |
ഒരു പ്രോജക്റ്റിലെ അടുത്ത ബ്ലോക്കിലേക്ക് നീങ്ങുന്നതിന് മുമ്പ് [Wait] ബ്ലോക്ക് ഒരു നിശ്ചിത സമയം കാത്തിരിക്കുന്നു. |
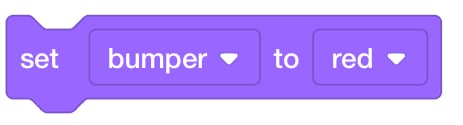 |
[സെറ്റ് ബമ്പർ കളർ] ബ്ലോക്ക് LED ബമ്പറിന്റെ നിറം സജ്ജമാക്കുന്നു. |