
Latar belakang
Mars Rover: Unit Operasi Permukaan akan membiasakan Anda dan siswa Anda dalam membangun proyek VEXcode GO untuk memecahkan suatu masalah. Tindakan penjelajah Perseverance dan Misi Mars 2020 digunakan sebagai inspirasi untuk tantangan yang akan dipecahkan siswa menggunakan VEXcode GO dan Basis Kode. Proyek yang mereka buat perlu diurutkan dengan benar untuk mengumpulkan sampel dan 'menguburnya'.
Misi Mars 2020 NASA
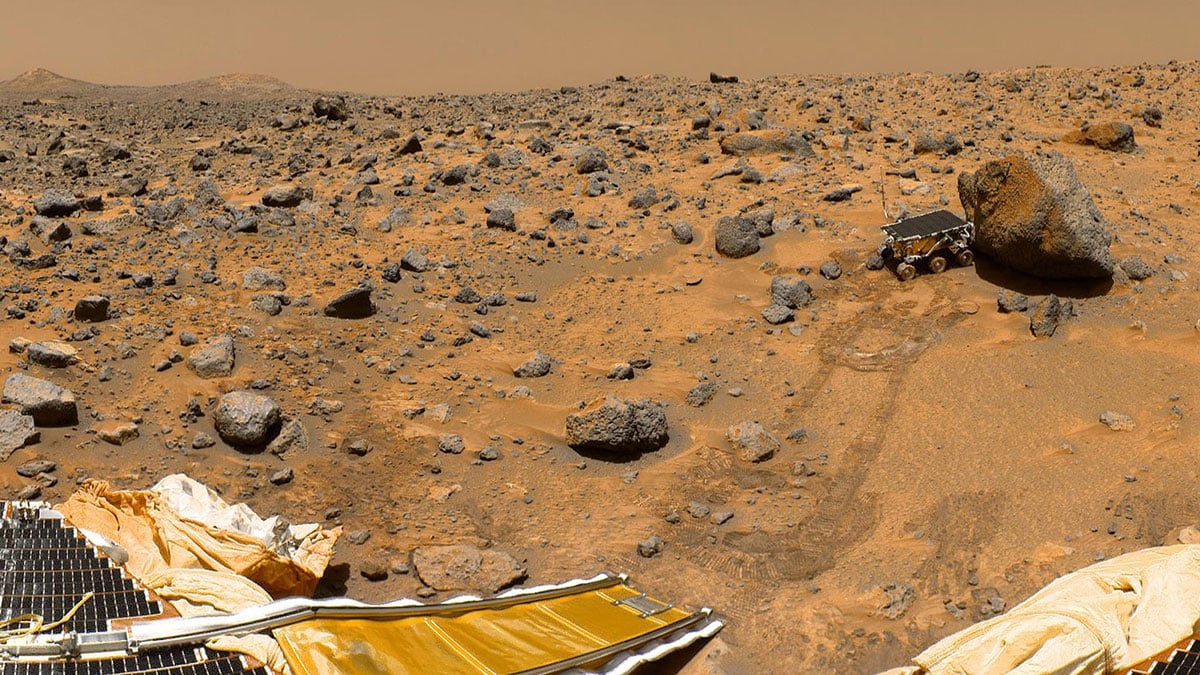
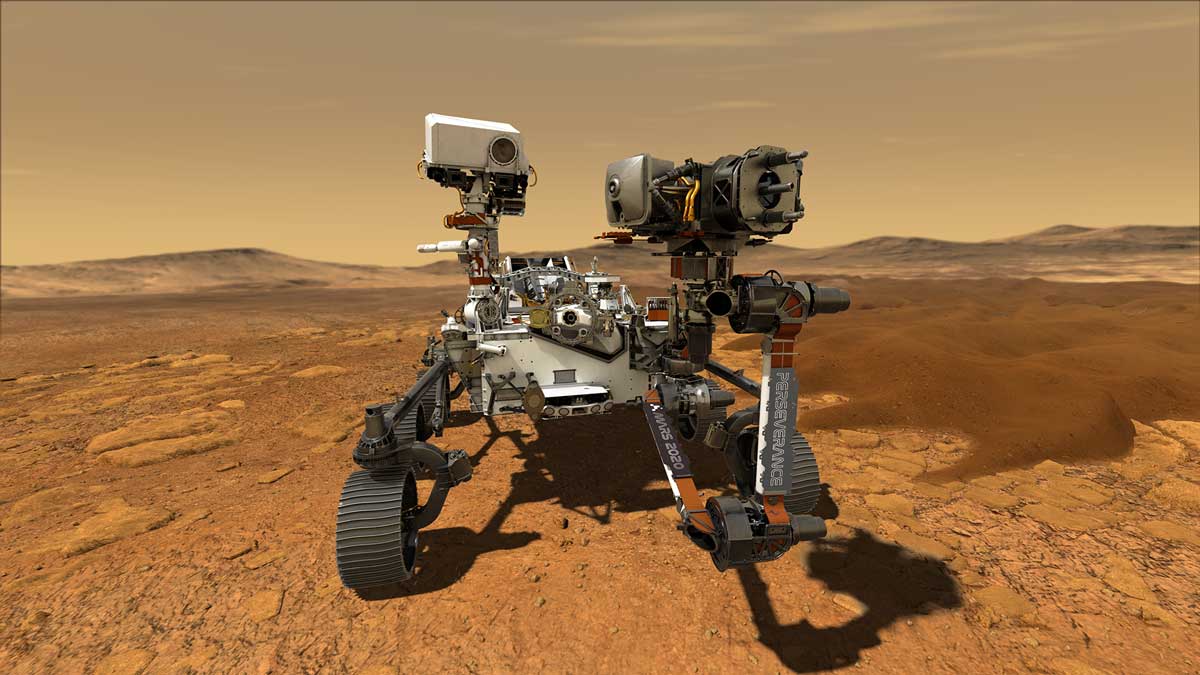
Misi Mars 2020 NASA membahas tujuan sains berprioritas tinggi untuk eksplorasi Mars: kehidupan, iklim, geologi, dan manusia. Penjelajah Perseverance akan menyelesaikan operasi permukaan untuk mengumpulkan data guna membantu menginformasikan penelitian di Planet Merah.
Apa itu rover?
Rover adalah perangkat yang dirancang untuk bergerak melintasi permukaan padat suatu planet atau benda langit lainnya (seperti Bulan). Beberapa penjelajah dirancang untuk mengangkut anggota kru luar angkasa, sementara yang lain merupakan robot yang sebagian atau sepenuhnya otonom. Robot-robot ini umumnya bertugas mengumpulkan informasi tentang medan dan mengumpulkan sampel batu, tanah, atau bahkan cairan.
Apa itu operasi permukaan?
Operasi permukaan adalah studi ilmiah yang akan diselesaikan penjelajah di Mars. Semuanya difokuskan pada penemuan, pengumpulan, dan penyimpanan sampel geologi. Untuk memulai, Perseverance akan mencari batu-batu yang kuat. Suatu batuan dapat dianggap meyakinkan jika memiliki kemungkinan untuk mempertahankan jejak kimiawi kehidupan purba atau telah diubah oleh lingkungan yang mendukung kehidupan mikroba.
Setelah mengidentifikasi batuan yang menarik, Perseverance akan mengebor sampel, menempatkannya dalam tabung tertutup, dan menyimpannya di permukaan. Penyimpanan depot, yang digunakan selama misi ini, adalah tempat beberapa sampel ditinggalkan atau dikubur di lokasi yang sama. Misi masa depan kemudian akan dapat mengambil sampel-sampel ini dan mengembalikan semuanya kepada para ilmuwan di Bumi.
Apa itu urutan?
Urutan adalah urutan khusus di mana perilaku dilakukan. Suatu tindakan atau kejadian mengarah ke tindakan berikutnya yang berurutan. Pengurutan penting untuk Basis Kode, karena robot hanya akan bergerak persis seperti perintah yang diperintahkan.
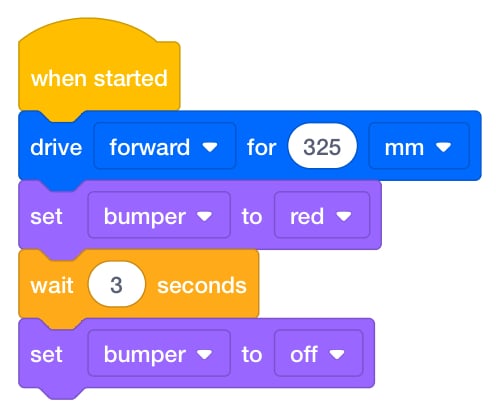
Dalam animasi ini, Anda dapat melihat bagaimana proyek dimulai dengan blok {When started} di bagian atas proyek, kemudian setiap blok dieksekusi secara berurutan dari atas ke bawah. Basis Kode melaju maju sejauh 325 milimeter (mm) di GO Field, menunggu 2 detik, lalu memancarkan warna pada LED Bumper. Fitur Sorotan hijau di sekitar blok menunjukkan blok mana yang sedang berjalan pada saat itu. Hal ini dapat memberi siswa umpan balik langsung untuk menghubungkan perilaku Basis Kode dengan blok VEXcode GO tertentu.
Langkah-Langkah untuk Mengurutkan Proyek
-
Pertama, identifikasi tujuan —apa yang perlu dilakukan? Misalnya, berkendara dari awal hingga sampel pertama.
Berkendara ke objek -
Kemudian, uraikan langkah-langkah yang diperlukan untuk mencapai tujuan, dan identifikasi hambatan yang diperlukan untuk mencapai langkah-langkah tersebut. Di sini Anda perlu bergerak maju sejauh 325 milimeter (mm) untuk mencapai sampel, lalu atur Sensor Bumper LED agar menyala merah untuk menunjukkan bahwa sampel sedang dikumpulkan, tunggu 3 detik untuk mengumpulkan sampel, lalu biarkan Sensor Bumper LED berhenti atau mati untuk menunjukkan sampel telah dikumpulkan. Hal ini dapat dilakukan dengan blok [Drive for], [Wait], dan [Set bumper color].

[Berkendara untuk], [Tunggu], dan [Atur warna bumper] blok
-
Berikutnya, rencanakan urutan proyek dengan menyeret blok yang cocok ke ruang kerja dan menempelkannya ke blok {When started} dari atas ke bawah. Saat setiap blok ditambahkan, ubah parameternya agar sesuai dengan langkah-langkah yang dipecah sebelumnya.
-
Pilih “Mulai” untuk menguji proyek dan melihat apakah Basis Kode mencapai tujuan yang diidentifikasi pada langkah pertama.
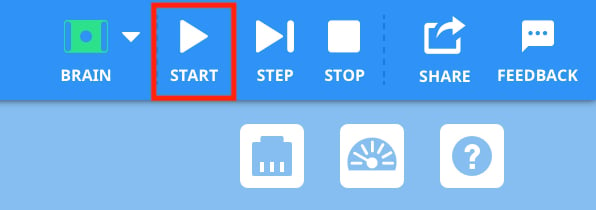
Pilih 'Mulai'
Jika Anda ingin mengubah proyek Anda, cukup ubah parameter, atau tambahkan dan hapus blok dari proyek sebelum menguji lagi.
Apa itu VEXcode GO?
VEXcode GO adalah lingkungan pengkodean yang digunakan untuk berkomunikasi dengan robot VEX GO. Siswa menggunakan antarmuka seret dan lepas untuk membuat proyek VEXcode GO yang mengendalikan tindakan robot mereka. Tujuan setiap blok dapat diidentifikasi menggunakan isyarat visual seperti bentuk, warna, dan labelnya. Untuk informasi lebih lanjut tentang cara bekerja dengan VEXcode GO, lihat Bagian VEXcode GO di Pustaka VEX.
Blok VEXcode GO berikut akan digunakan dalam Unit ini:
| Blok VEXcode GO | Perilaku |
|---|---|
 |
Blok {When start} mulai menjalankan tumpukan blok terlampir saat proyek dimulai. |
 |
Blok [Drive for] menggerakkan Drivetrain maju atau mundur pada jarak tertentu. Tetapkan sejauh mana Drivetrain akan bergerak dengan memasukkan nilai ke dalam oval. |
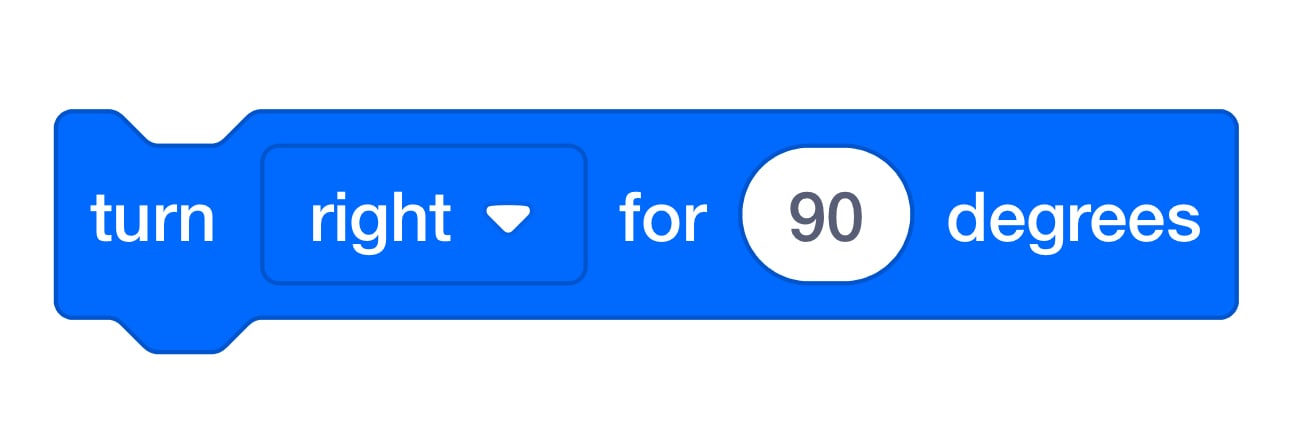 |
Blok [Putar selama] memutar Drivetrain untuk jarak tertentu. Tetapkan sejauh mana Drivetrain akan berputar dengan memasukkan nilai ke dalam oval. |
 |
Blok [Tunggu] menunggu selama jangka waktu tertentu sebelum berpindah ke blok berikutnya dalam suatu proyek. |
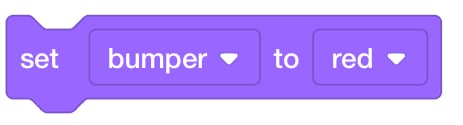 |
Blok [Set bumper color] mengatur warna LED Bumper. |