
Turning at Different Velocities
Next, turn the Autopilot at different velocities!
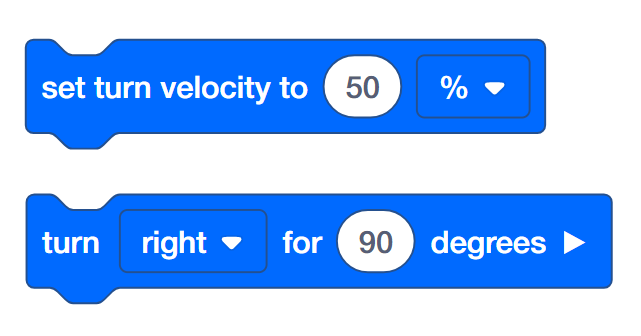
Setting the velocity for driving and setting the velocity for turning are two separate blocks. This is helpful when you want the robot to drive at a certain velocity but turn at a different one. In a timed competition for example, the robot might drive very quickly around the field but turn more slowly and carefully.
Add the following blocks to your Drive Velocities:
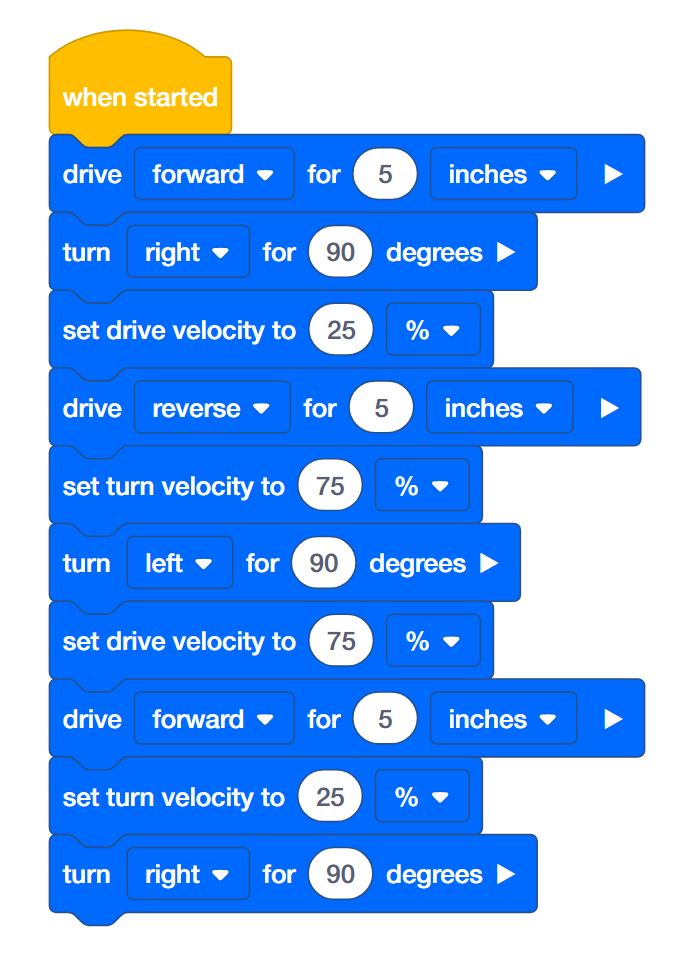
- The Programmer should add these blocks to your project and then download it to your Autopilot.
- The Driver should then run the project.
- Notice how the turning velocities compare to each other. Also, notice how they are different than the driving velocities.
- Your group should discuss your observations and the Recorder should write them in your engineering notebook.
![]() Extend Your Learning
-
Percentages, Fractions, & Decimals
Extend Your Learning
-
Percentages, Fractions, & Decimals
So far, students have been using percents for the [set drive velocity] and [set turn velocity] blocks. Click one of the following links (Google Doc/.docx/.pdf) for information on how to instruct your students to convert percentages into fractions and decimals.
![]() Teacher Tips
-
Positive Behaviors
Teacher Tips
-
Positive Behaviors
Create a list of specific behaviors you want to encourage. Examples could include:
-
Students self-organizing with the roles within a group
-
Students performing each of their roles well within a group
-
Students handling the robot and the computers/tablets with care
-
Students praising and encouraging one another during the exploration
When students use these behaviors, praise them immediately. Be specific when offering praise. For example, instead of saying, “good job,” you could instead say, “good job carefully returning the Autopilot robot to the correct spot.”