
次に、オートパイロットをさまざまな速度で回転させます。
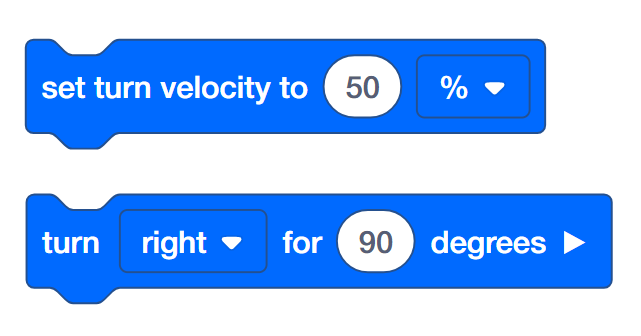
駆動速度の設定と旋回速度の設定は 2 つの別個のブロックです。 これは、ロボットを特定の速度で走行させながら、別の速度で回転させたい場合に役立ちます。 たとえば、時間制限のある競技では、ロボットはフィールド内を非常に速く運転しますが、方向転換はよりゆっくりと慎重に行う場合があります。
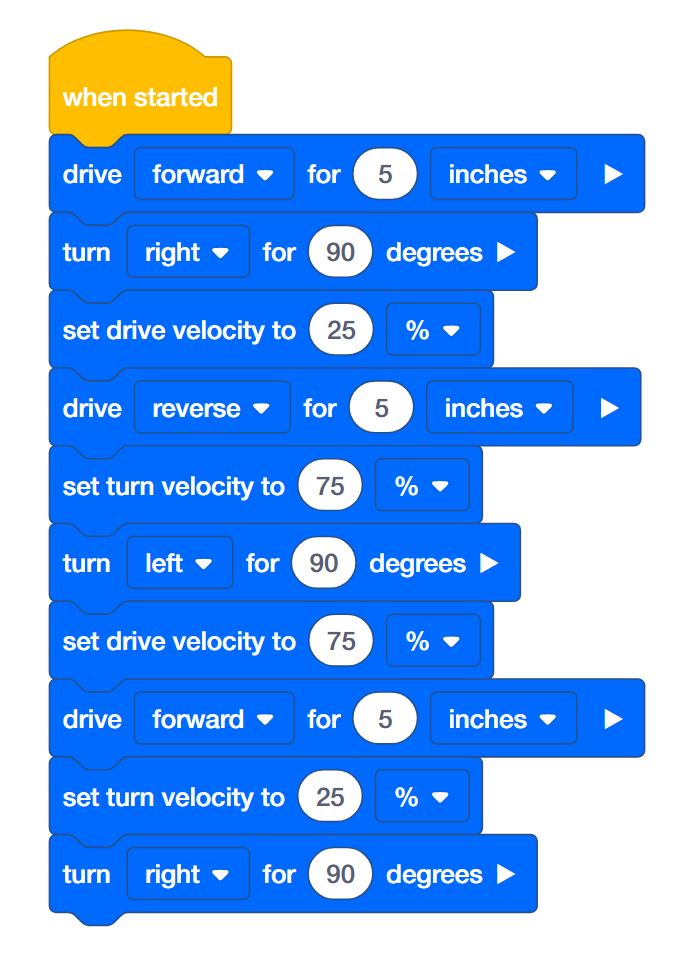
次のブロックを Drive Velocities に追加します。
-
プログラマはこれらのブロックをプロジェクトに追加し、それをオートパイロットにダウンロードする必要があります。
-
その後、ドライバーはプロジェクトを実行する必要があります。
-
回転速度が互いにどのように比較されるかに注目してください。 また、運転速度との違いにも注目してください。
-
あなたのグループはあなたの観察について話し合い、記録者はあなたの観察をエンジニアリングノートに書き留める必要があります。
![]() 学習を拡張する
-
パーセンテージ、分数、 & 小数
学習を拡張する
-
パーセンテージ、分数、 & 小数
これまで、生徒は [ドライブ速度の設定] ブロックと [回転速度の設定] ブロックにパーセントを使用してきました。 パーセンテージを分数や小数に変換するよう生徒に指導する方法については、次のいずれかのリンク (Google Doc/.docx/.pdf) をクリックしてください。
![]() 教師のヒント
-
ポジティブな行動
教師のヒント
-
ポジティブな行動
奨励したい特定の行動のリストを作成します。 例としては次のものが挙げられます。
-
グループ内での役割に応じて自己組織化する生徒
-
グループ内でそれぞれの役割をうまく遂行する生徒たち
-
ロボットやパソコン・タブレットを丁寧に扱う生徒たち
-
探検中にお互いを称賛し、励まし合う生徒たち
生徒がこれらの行動をとった場合は、すぐに褒めてください。 褒めるときは具体的にしましょう。 たとえば、「よくやった」と言う代わりに、「オートパイロット ロボットを慎重に正しい位置に戻してよかったです」と言うこともできます。