
Girando em velocidades diferentes
Em seguida, gire o piloto automático em velocidades diferentes!
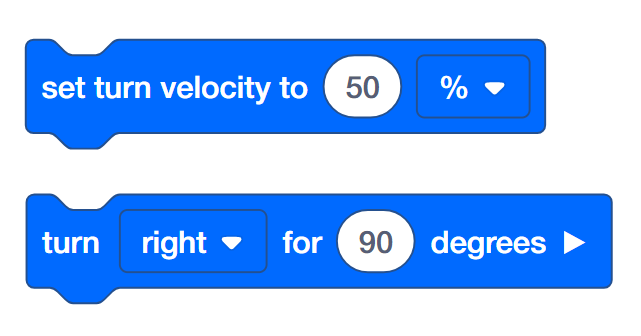
Definir a velocidade para dirigir e definir a velocidade para girar são dois blocos separados. Isso é útil quando você deseja que o robô conduza a uma certa velocidade, mas gire a uma velocidade diferente. Em uma competição cronometrada, por exemplo, o robô pode dirigir muito rapidamente pelo campo, mas virar mais devagar e com cuidado.
Adicione os seguintes blocos às suas velocidades de acionamento:
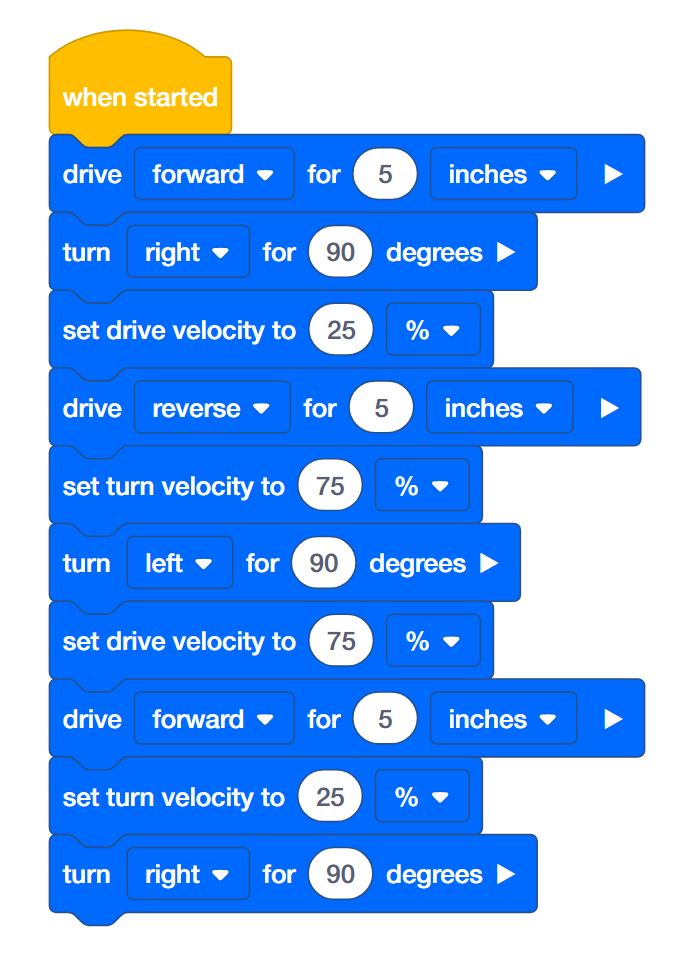
- O Programador deve adicionar esses blocos ao seu projeto e, em seguida, baixá-lo para o seu Piloto Automático.
- O Controlador deve então executar o projeto.
- Observe como as velocidades de giro se comparam entre si. Além disso, observe como elas são diferentes das velocidades de condução.
- O seu grupo deve discutir as suas observações e o Gravador deve escrevê-las no seu caderno de engenharia.
![]() Estenda Sua Aprendizagem
-
Porcentagens, Frações, & Decimais
Estenda Sua Aprendizagem
-
Porcentagens, Frações, & Decimais
Até agora, os alunos têm usado porcentagens para os blocos [set drive velocity] e [set turn velocity]. Clique em um dos links a seguir (Google Doc/.docx/.pdf) para obter informações sobre como instruir seus alunos a converter porcentagens em frações e casas decimais.
![]() Dicas para Professores
- Comportamentos
Positivos
Dicas para Professores
- Comportamentos
Positivos
Crie uma lista de comportamentos específicos que deseja incentivar. Exemplos podem incluir:
-
Os alunos se auto-organizam com as funções dentro de um grupo
-
Os alunos desempenham bem cada uma das suas funções dentro de um grupo
-
Alunos que manuseiam o robô e os computadores/tablets com cuidado
-
Os alunos elogiam e incentivam uns aos outros durante a exploração
Quando os alunos usarem esses comportamentos, elogie-os imediatamente. Seja específico ao elogiar. Por exemplo, em vez de dizer "bom trabalho", você poderia dizer "bom trabalho em devolver cuidadosamente o robô do piloto automático ao local correto".