
The VEX IQ Bumper Switch
The VEX IQ Super Kit contains five different sensors that can be used with the VEX IQ Brain. All five are built into the Testbed you previously built in the Seek section of this STEM Lab.
The Play section of the lab will explain how each sensor works and how it can be used in the design of a robot. The table below lists everything you will need to complete the Play section of this lab.
| Quantity | Materials Needed |
|---|---|
| 1 |
VEX IQ Testbed (with up-to-date firmware) |
| 1 |
VEXcode IQ |
| 1 |
Engineering Notebook |
| 1 |
Testbed Template example project |
| 1 |
Roll of black or dark tape |
| 1 |
Clear, light-colored surface |
Read about the Bumper Switch
To learn more about the Bumper Switch, ask the Reader to organize how the group will read the VEX IQ Bumper Switch article from the VEX Library. This article will cover how the Bumper Switch works as provide common uses.
Program with the Bumper Switch
Have the Programmer open VEXcode IQ and follow these steps:
-
Begin by opening the Testbed template example project from VEXcode IQ.

- For help opening the example project, view the Use Example Projects and Templates tutorial video.
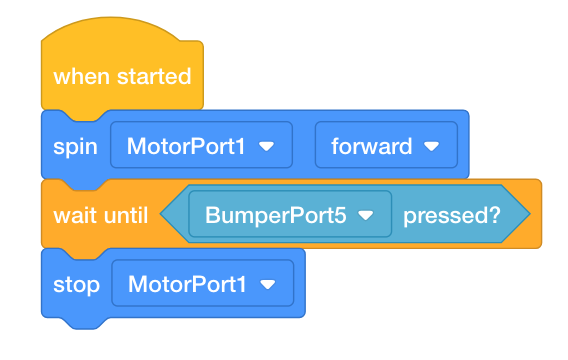
-
Build the following project and save it (macOS, Windows, Chromebook, iPad) as Bumper Switch:
You can use the Help information inside of VEXcode IQ to learn about the blocks. For guidance in using the Help feature, see the Using Help tutorial.

Test the Bumper Switch
Have the Tester connect the VEX IQ Brain to your computer and then follow these steps:
-
Download the project to the IQ Robot Brain.
-
Run the project to press the Bumper Switch to stop the Motor from spinning in Port 1.
-
For help downloading and running a project, view the Download and Run a Project tutorial video.
-
Based on your observations of how the sensor behaved on the Testbed and the information from the reading, answer the following questions and ask the Recorder to document them in your engineering notebook:
-
What is the value of the Bumper Switch when the motor is spinning?
-
What is the value of the Bumper Switch when it is pressed?
-