
The VEX IQ Gyro Sensor
Read about the Gyro Sensor
To learn more about the Gyro Sensor, ask the Reader to organize how the group will read the VEX IQ Gyro Sensor article from the VEX Library. This article will cover how the Gyro Sensor works and provide common uses.

Program with the Gyro Sensor
Have the Programmer open VEXcode IQ and follow these steps:
-
Begin by opening the Testbed template example project from VEXcode IQ.

- For help opening the example project, view the Use Example Projects and Templates tutorial video.
-
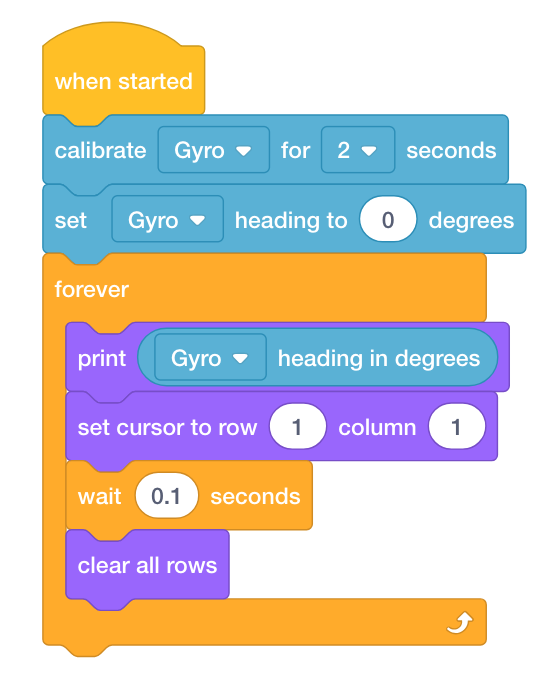
Build the following project and save it (macOS, Windows, Chromebook, iPad) as Gyro Sensor:
Test the Gyro Sensor
Have the Tester connect the VEX IQ Brain to your computer and then follow these steps:
- Download the project to the IQ Robot Brain.
- Run the project to report and print what the current Gyro Sensor's heading is in degrees as the Gyro Sensor rotates.
- For help downloading and running a project, view the Download and Run a Project tutorial video.
- Based on your observations of how the sensor behaved on the Testbed and the information from the reading, answer the following questions and ask the Recorder to document them in your engineering notebook:
- What causes the value of the Gyro Sensor to increase? What causes it to decrease?
- Can the Gyro Sensor report values greater than 360?
- Why would including a Gyro Sensor on a robot be helpful?
- Can the Gyro Sensor measure more than one axis at a time?
- Can it measure up-and-down as well as left-and-right at the same time?
- What about if the Gyro Sensor is positioned differently on the robot?