
Practice
In the last section, you learned about the motor groups and configuring a motor group in VEXcode IQ. Now, you are going to apply what you have learned to iterate on your robot to complete the Over the Barrier practice activity.
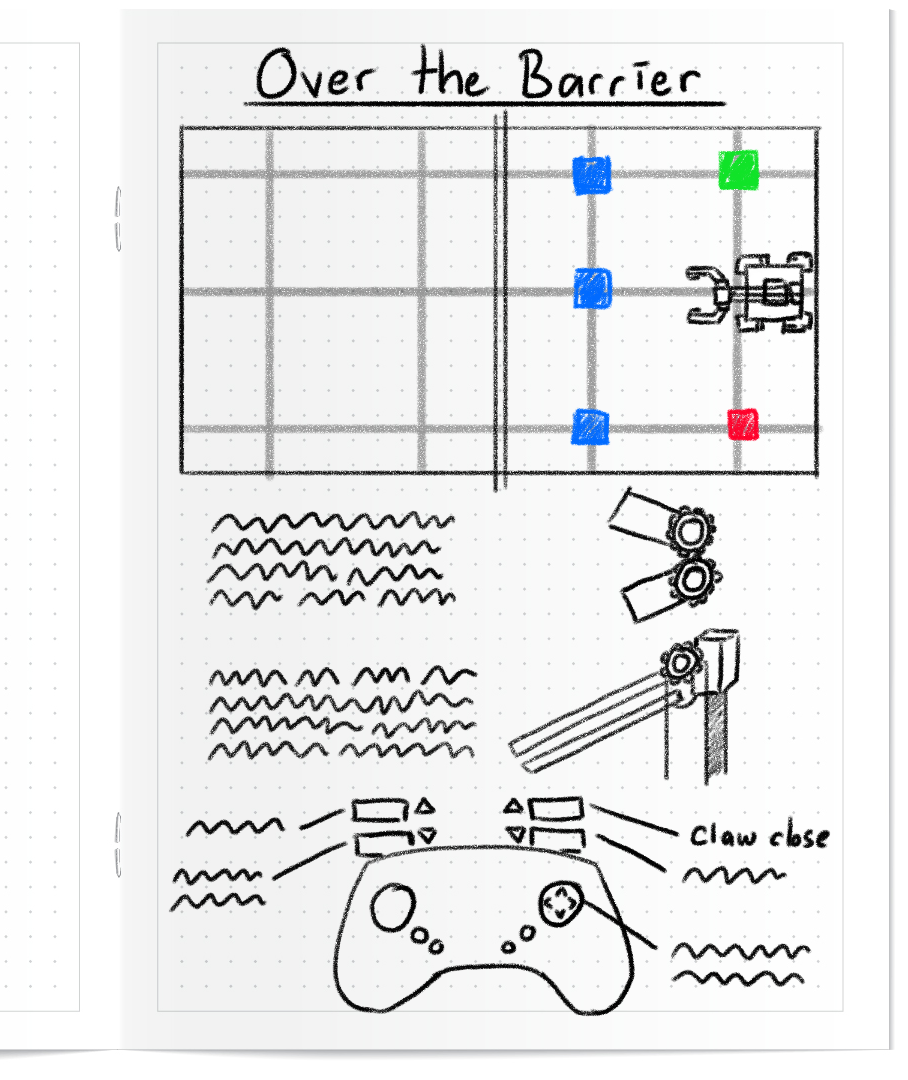
In this activity, you will need to drive your robot using the Controller to move six IQ Cubes from one side of the Field, over the barrier, to the other side. You will iterate on the design of your build to improve your robot's ability to move the cubes over the barrier. Watch the video below to see how you can apply what you have learned to complete the Over the Barrier practice activity.
Now it's your turn to complete the Over the Barrier practice activity!
In this animation, a Controller is used to drive the robot to each of the five cubes on the Field, collect it, and move it over the barrier to the other side. This animation shows one possible way your robot could move to complete the Over the Barrier practice activity.
Use this document as a reference to complete the practice activity.
As you complete the Over the Barrier practice activity, document the following in your engineering notebook:
- Describe and illustrate your robot design. How does your claw and arm design work together to complete the activity?
- Could your robot benefit from adding a motor group? How can you edit your design to have an additional motor to use for a motor group?
- Collect driver data, such as the name and score for each driver that completes the activity.
See the image on the left for an example of how you can record your design ideas and tests.
Prepare for the Challenge
In Compete (on the next page), you will test your designs in the Up and Over Challenge. Learn how to compete in the challenge, check your understanding, then practice for the challenge.
The goal of this challenge is to use the Controller to drive your robot and move six cubes from one side of the Field, over the barrier to the other side of the Field in the least amount of time.
Watch this animation to see an example of a Clawbot moving the six cubes from one side of the divided Field to the other, finishing in about 57 seconds.
Follow the steps in this document to learn more about how to complete this challenge.
Check Your Understanding
Before beginning the challenge, ensure that you understand the rules and setup of the challenge by answering the questions in the document below in your engineering notebook.
Check Your Understanding questions
After completing the questions, try practicing the challenge.
Select Next > to compete in the Up and Over Challenge.