
練習する
前のセクションでは、モーター グループと VEXcode IQ でのモーター グループの構成について学びました。 ここで、学習した内容をロボット上で反復して適用し、「Over the Barrier の練習アクティビティを完了します。
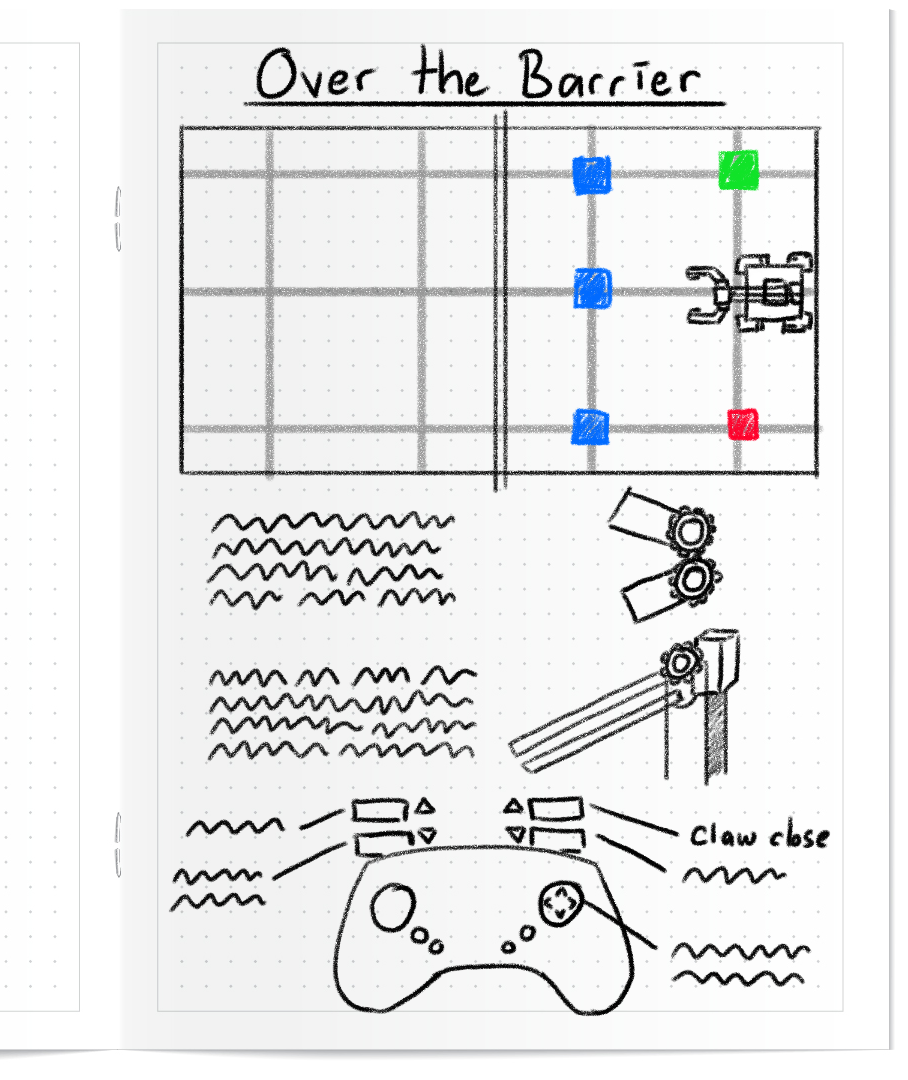
このアクティビティでは、コントローラーを使用してロボットを運転し、6 つの IQ キューブをフィールドの一方の側からバリアを越えて反対側に移動する必要があります。 ビルド の設計を繰り返して、バリアを越えてキューブを移動するロボットの能力を向上させます。 以下のビデオを見て、学んだ内容を適用して「Over the Barrier の練習アクティビティを完了する方法を確認してください。
次は、「Over the Barrier 練習アクティビティを完了する番です。
このアニメーションでは、コントローラーを使用して ロボット を各立方体まで駆動し、収集し、バリアを越えて反対側に移動します。 このアニメーションは、ロボットがバリアを越える練習アクティビティを完了するために移動できる 1 つの考えられる方法を示しています。
この文書を参考として使用して、練習アクティビティを完了してください。
「Over the Barrier」の実践アクティビティを完了したら、エンジニアリング ノートに次のことを文書化します。
- ロボットの設計を説明して図解してください。 爪と腕のデザインはどのように連携してアクティビティを完了しますか?
- あなたのロボットはモーターグループを することで恩恵を受けるでしょうか? デザインを編集してモーター グループに使用するモーターを追加するにはどうすればよいでしょうか?
- アクティビティを完了した各ドライバーの名前やスコアなどのドライバー データを収集します。
設計のアイデアとテストを記録する方法の例については、左の画像 を参照してください。
チャレンジの準備をする
Compete (次のページ) では、Up and Over Challenge でデザインをテストします。 チャレンジに参加する方法を学び、理解度を確認してから、チャレンジに向けて練習してください。