
Pratique
Dans la dernière section, vous avez découvert les groupes moteurs et la configuration d'un groupe moteur dans VEXcode IQ. Maintenant, vous allez appliquer ce que vous avez appris à itérer sur votre robot pour terminer l'activité de pratique Over the Barrier.
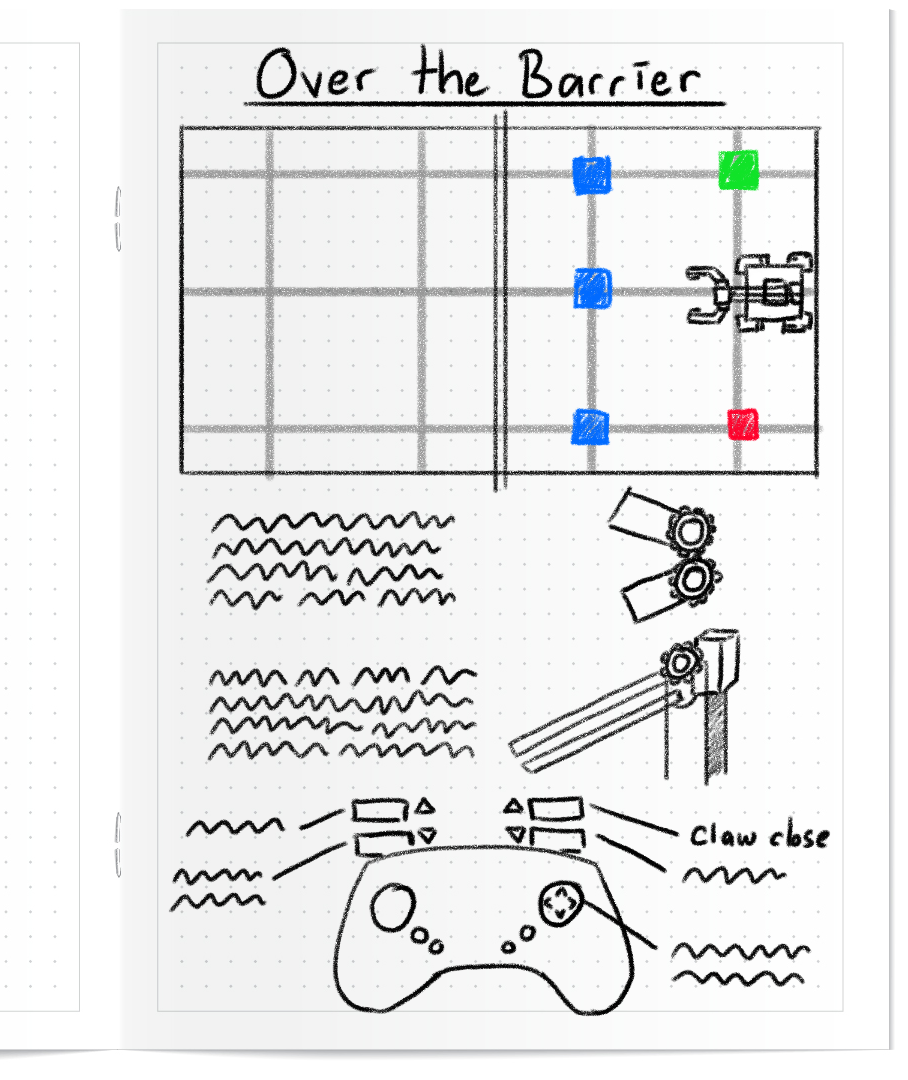
Dans cette activité, vous devrez conduire votre robot à l'aide du contrôleur pour déplacer six cubes de QI d'un côté du champ, au-dessus de la barrière, de l'autre côté. Vous itérerez sur la conception de votre construction pour améliorer la capacité de votre robot à déplacer les cubes au-dessus de la barrière. Regardez la vidéo ci-dessous pour voir comment vous pouvez appliquer ce que vous avez appris pour terminer l'activité pratique Sur la barrière.
Maintenant, c'est à votre tour de terminer l'activité de pratique Over the Barrier !
Dans cette animation, un contrôleur est utilisé pour conduire le robot vers chaque cube, le collecter et le déplacer sur la barrière de l'autre côté. Cette animation montre une façon possible pour votre robot de se déplacer pour terminer l'activité d'entraînement Over the Barrier.
Utilisez ce document comme référence pour terminer l'activité de pratique.
Lorsque vous terminez l'activité pratique Over the Barrier, documentez ce qui suit dans votre cahier d'ingénierie :
- Décrivez et illustrez la conception de votre robot. Comment votre conception de griffe et de bras fonctionne-t-elle ensemble pour terminer l'activité ?
- Votre robot pourrait-il bénéficier de l' ajout d'un groupe moteur ? Comment pouvez-vous modifier votre conception pour avoir un moteur supplémentaire à utiliser pour un groupe moteur ?
- Collectez des données sur les chauffeurs, telles que le nom et le score de chaque chauffeur qui termine l'activité.
Voir l'image à gauche pour un exemple de la façon dont vous pouvez enregistrer vos idées de conception et vos tests.
Préparez-vous à relever le défi
Dans Compete (à la page suivante), vous testerez vos designs dans le défi Up and Over. Apprenez à participer au défi, vérifiez votre compréhension, puis entraînez-vous pour le défi.
Le but de ce défi est d'utiliser le contrôleur pour conduire votre robot et déplacer six cubes d'un côté du champ, au-dessus de la barrière de l'autre côté du champ en un minimum de temps.
Regardez cette animation pour voir un exemple d'un Clawbot déplaçant les six cubes d'un côté du champ à l'autre.
Suivez les étapes de ce document pour en savoir plus sur la façon de relever ce défi.
Vérifiez votre compréhension
Avant de commencer le défi, assurez-vous de comprendre les règles et la configuration du défi en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez vos questions de compréhension
Après avoir répondu aux questions, essayez de relever le défi.
Sélectionnez Suivant > pour participer au défi Up and Over.