
Introduzione
In questa lezione, imparerai a conoscere il sensore ottico e come utilizzare il feedback del sensore per ottimizzare la tua strategia e il tuo codice per giocare a Castle Crasher. Imparerai anche come creare un algoritmo per codificare il tuo robot per trovare autonomamente Buckyballs e completare la sfida Sweep the Field. Guarda l'animazione qui sotto per vedere un esempio di come il robot potrebbe muoversi per rilevare e rimuovere le Buckyball dal Campo senza cadere dal bordo.
Aggiungi un sensore ottico
In questa lezione, imparerai a conoscere il sensore ottico ed esplorerai come utilizzarlo con il sensore di distanza per creare un algoritmo.
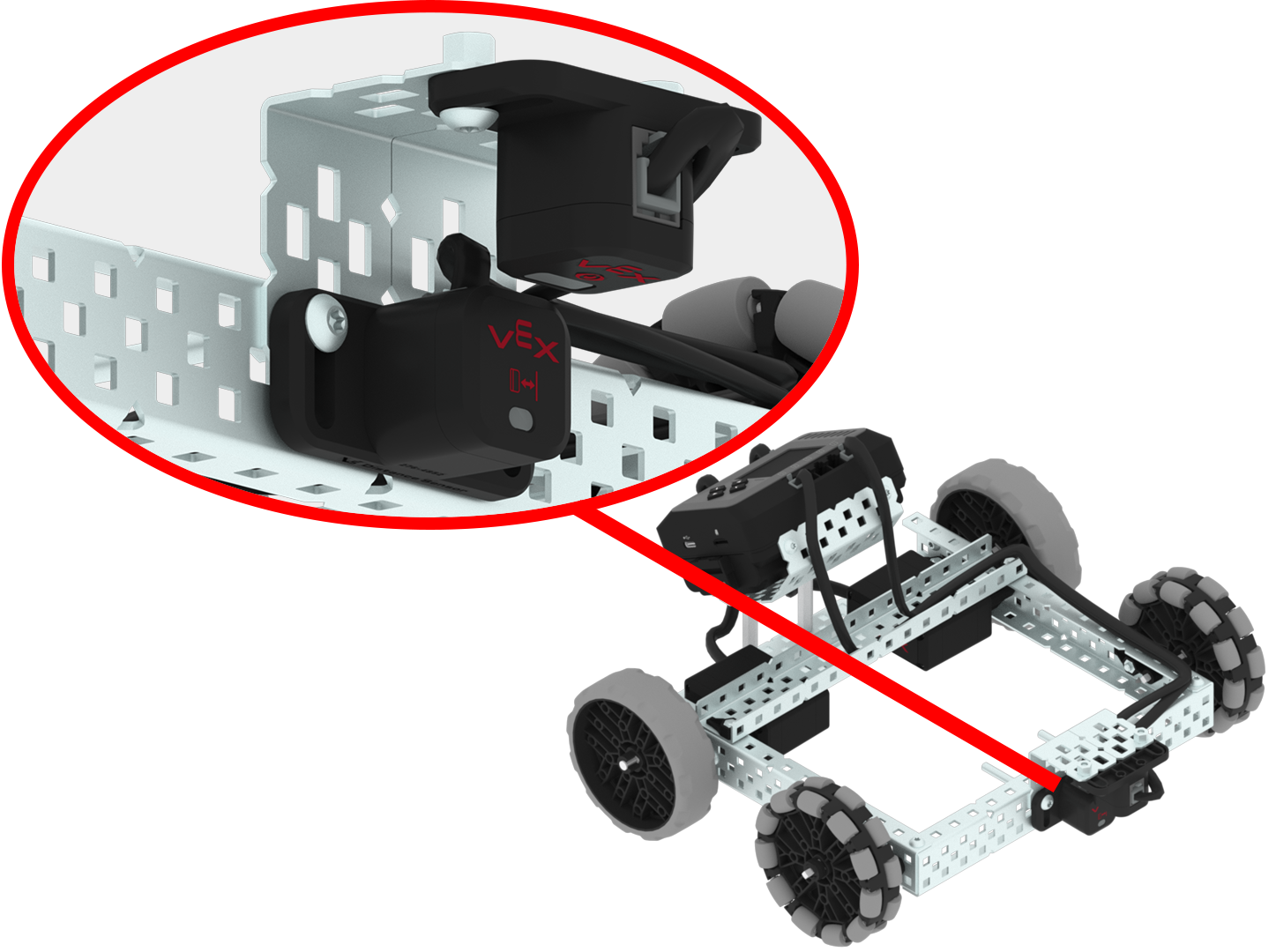
Aggiungere i sensori ottici e di distanza al BaseBot come mostrato in questa immagine.
- Aggiungere un canale C 1x2x1x16 nella parte anteriore del BaseBot come mostrato.
- Quindi, montare il sensore di distanza sul canale C rivolto verso l'esterno, come mostrato nell'immagine.
- Aggiungere il sensore ottico rivolto verso il basso.
- Il sensore di distanza deve essere collegato alla porta 5 e il sensore ottico alla porta 1.
Seleziona < Torna alle lezioni per tornare alla panoramica delle lezioni.
Selezionare Avanti > per conoscere il sensore ottico e come è possibile utilizzare il feedback del sensore e gli algoritmi per codificare il robot per trovare e spingere Buckyballs fuori da un campo.