
소개
이 수업에서는 광학 센서에 대해 알아보고, 센서 피드백을 사용하여 Castle Crasher를 플레이하기 위한 전략과 코드를 최적화하는 방법을 알아봅니다. 또한 로봇이 자율적으로 버키볼을 찾고 Sweep the Field 챌린지를 완료하도록 코딩하는 알고리즘을 만드는 방법도 배웁니다. 아래 애니메이션을 시청하면 로봇이 필드에서 버키볼을 감지하고 가장자리에서 떨어지지 않고 제거하는 방법의 예를 볼 수 있습니다.
광학 센서 추가
이 수업에서는 광학 센서에 대해 알아보고, 거리 센서와 함께 사용하여 알고리즘을 만드는 방법을 살펴봅니다.
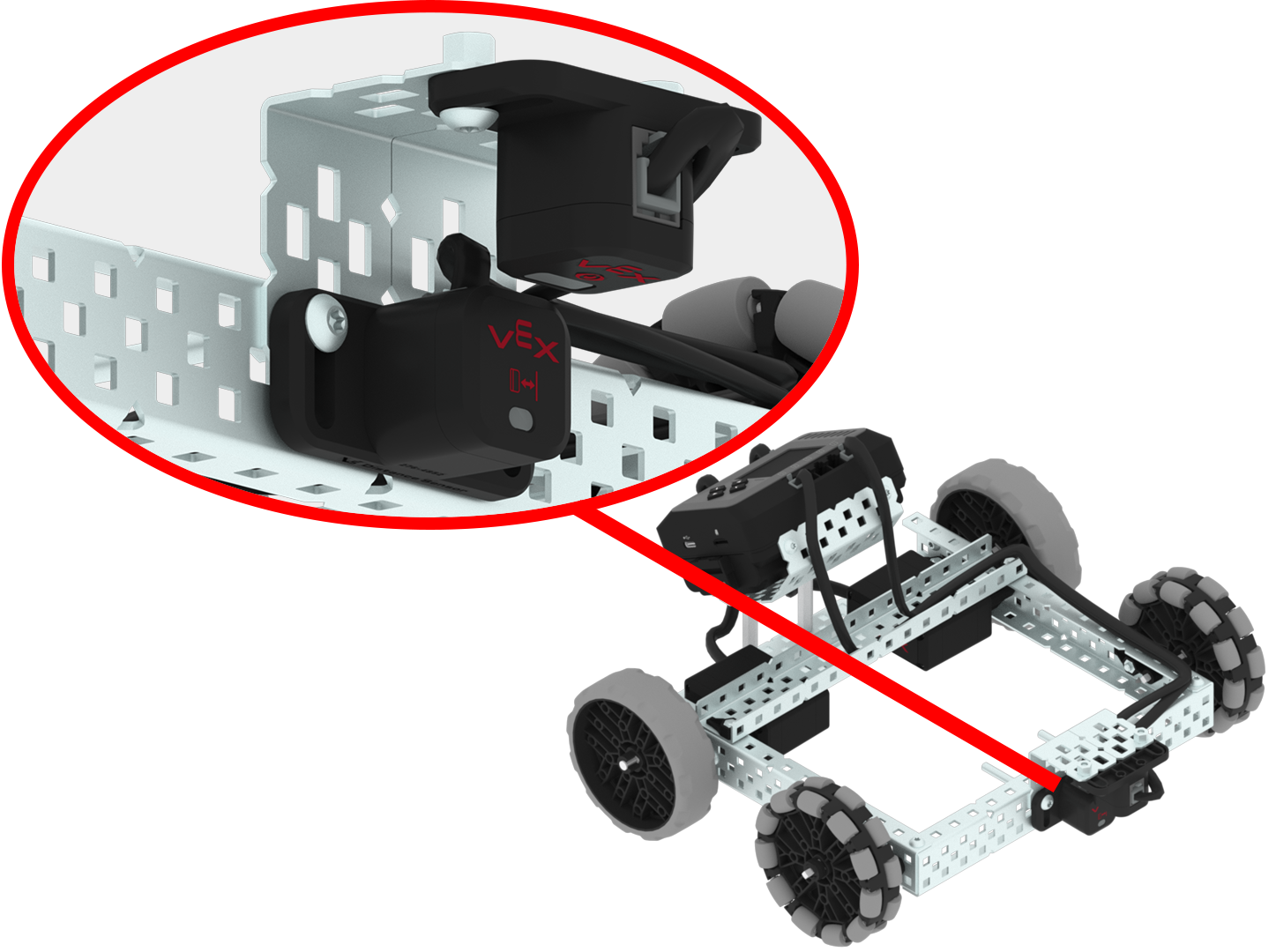
이 이미지에 표시된 대로 BaseBot에 광학 센서와 거리 센서를 추가합니다.
- 표시된 대로 BaseBot 앞쪽에 1x2x1x16 C-채널을 추가합니다.
- 그런 다음, 그림과 같이 거리 센서를 바깥쪽을 향하게 C채널에 장착합니다.
- 아래쪽을 향하도록 광학 센서를 추가합니다.
- 거리 센서는 포트 5에, 광학 센서는 포트 1에 연결해야 합니다.
수업 개요로 돌아가려면< 수업로 돌아가기를 선택하세요.
다음 >선택하여 광학 센서에 대해 알아보고, 센서 피드백과 알고리즘을 사용하여 로봇을 코딩하여 필드에서 버키볼을 찾아 밀어내는 방법을 알아보세요.